HEAVY MACHINERY - HM 2011, StartPage-EndPage Paper accepted: 00.00.2011 ISBN 978-86-82631-45-3
Insert Title here (Style: Times New Roman, 16pt, Bold, Title Case)
Author's name1,* - Co-author's name2 (Style: Times New Roman, 10pt) 1 Author's institution (Style: Times New Roman, 10pt) 2 Co-Author's institution (Style: Times New Roman, 10pt)
The active steering is to stabilize the wheelset and to provide a guidance control. The developed controller is able to maintain stability and good performance when parameter variations occur, in particular at the wheel-rail interface. This paper presents the development of control strategy for the active steering of railway vehicles with independently rotating wheelsets. The study has shown that a robust controller with practical sensors can be developed to stabilize the wheelset and to provide necessary guidance control. The control design has been formulated to tackle effectively parameter variations and unmodeled dynamics and the -synthesis technique has been used to examine and guarantee the robustness of the closed loop. (Style: Times New Roman, 10pt, Italic) Keywords: Railway vehicle, independently rotating wheelset, active steering. (Style: Times New Roman, 10pt, Bold)
0 INTRODUCTION independently rotating wheelsets. The wheelsets (Style: Times New Roman, 10pt, Upper Case) are connected to the body via typical springs and dampers in the lateral direction with typical In the railway industry, one of the values for a secondary suspension. significant developments is the use of active The wheelsets are connected to the body controls for railway vehicles. Tilting trains have via typical springs and dampers in the lateral been successfully used in Europe and the rest of direction with typical values for a secondary the world, and it appears certain that active suspension secondary suspensions will be widely used. A conventional railway wheelset comprises two coned or otherwise profiled wheels joined together by a solid axle [1] to [5]. Since the digging drive in the BWE represents a subsystem of vital importance for the reliability in operation and stability of the BWE. (Style: Normal text)
1.1 Subtitle 1 (Style: Times New Roman, 10pt, Bold, Title Case) That must be addressed is how a control design tackles system uncertainty, which may result from several sources:
1.1.1 Subtitle 2 (Style: Times New Roman, 10pt, Itali, Title Case)
The active steering action only affects the lateral and yaw motions of the vehicle, the plan view model of the vehicle is sufficient for developing active control schemes. Fig. 1 gives a simplified plan view diagram. The modeled scheme mainly consists of a body and two
*Corr. Author's Address: Name of institution, Address, City, Country, [email protected] 1 HEAVY MACHINERY - HM 2011, StartPage-EndPage Paper accepted: 00.00.2011 ISBN 978-86-82631-45-3
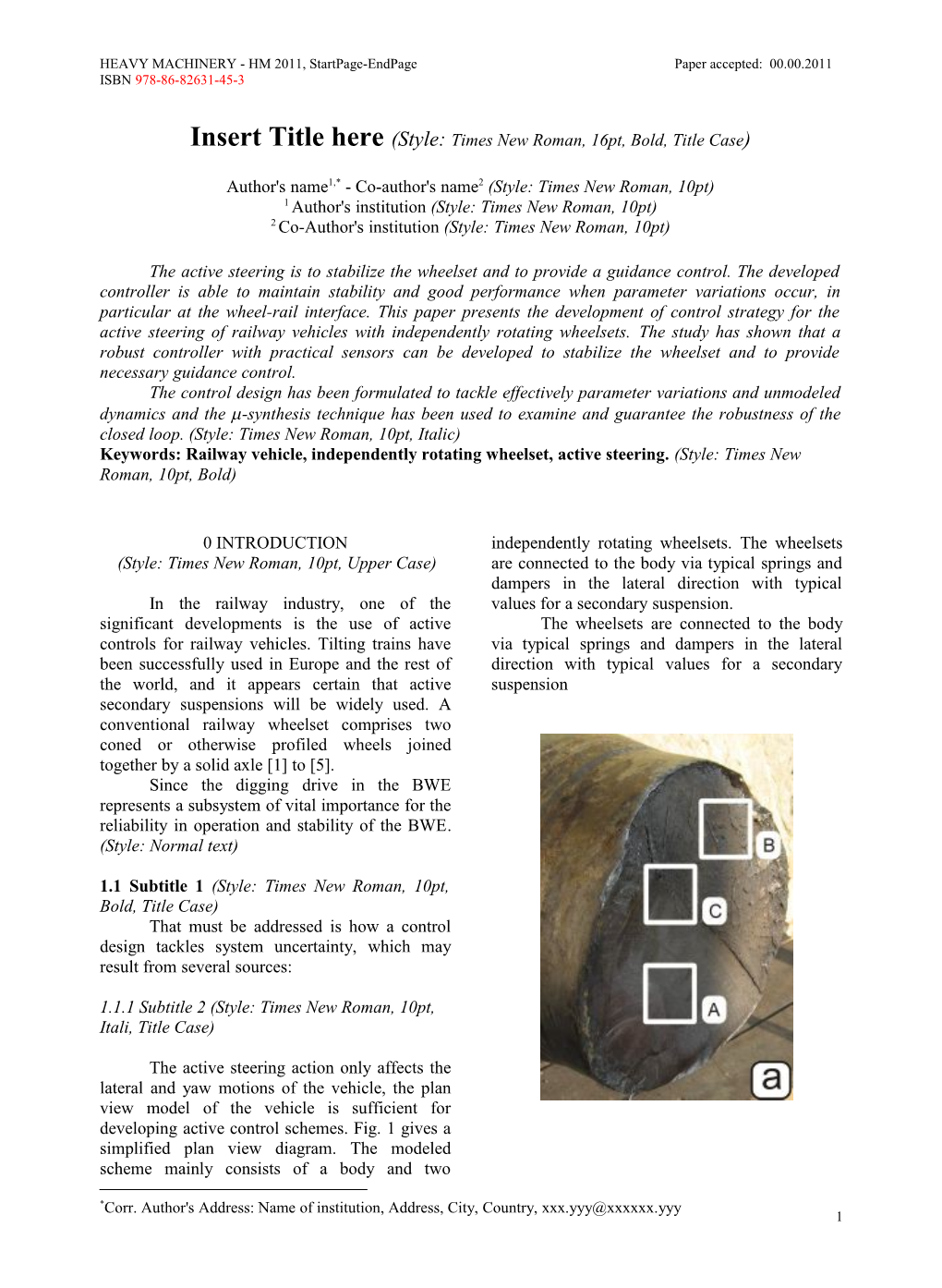
Fig. 1. Place of fatigue fracture initiation on the bucket wheel axle (Style: Times New Roman, 10pt, Italic) MARC/AutoForge3.1 software. The material same part of a barren tube billet, and then database of MARC/AutoForge3.1 software do not manufactured into dozens of specimens with a have the data of the flow stress of steel 33Mn2V, diameter of 8mm and a length of 15mm. so its database should be set up. The experimental According to various process parameters based on material was taken from the same part of a barren practice production, the hot upsetting experiments tube billet, and then manufactured into dozens of was conducted on a thermal/dynamic simulation specimens with a diameter of 8mm and a length tester and then their flow stress curves were of 15mm. written down, and stored into the computer by x= A�� x B uГ w . (1) MARC/AutoForge3.1 software’s format. The whole flow stress curves are shown in Figure 1. According to various process parameters The thermo-physical parameters including heat based on practice production, the hot upsetting conductivity, specific. While numerically experiments was conducted on a thermal/dynamic simulating the above process, it is necessary to simulation tester and then their flow stress curves conduct a coupled analysis, and give a were written down, and stored into the computer consideration to the contact heat transfer by by MARC/AutoForge3.1 software’s format. The contact between the: whole flow stress curves are shown in Figure 3. The thermo-physical parameters including heat wi 0 W fi ki , (2) conductivity, specific FEM was used for 0 wi simulation of two-pass processing tube tension- reducing of the new steel 33Mn2V for oil well while numerically simulating the above process, tubes using MARC/AutoForge3.1 software. The it is necessary to conduct a coupled analysis, and material database of MARC/AutoForge3.1 give a consideration to the contact heat transfer software do not have the data of the flow stress of by contact between the work-piece and the roll, steel 33Mn2V, so its database should be set up. convection and radiation between the work-piece The experimental material was taken from the and the environment, and the heat generation due by contact between the work-piece and the roll,
*Corr. Author's Address: Name of institution, Address, City, Country, [email protected] 2 HEAVY MACHINERY - HM 2011, StartPage-EndPage Paper accepted: 00.00.2011 ISBN 978-86-82631-45-3
Fig. xx. Figure figure figure (Style: Times New Roman, 10pt, Italic)
Table 1. Chemical and mechanical properties of AA6351 alloy (Style: Times New Roman, 10pt, Italic) a) Chemical composition of AA6351 alloy (% weight) Si Fe Cu Mn Mg Zn Al 1.03 0.237 0.0723 0.584 0.665 0.003 Balance
b) Mechanical properties of AA6351 alloy Density Elastic modulus Tensile Strength Elongation Hardness (x1000 kg/m3) GPa MPa % BHN 2.7 75 250 20 102
where parameters of weighting matrices: k1, k2 - uncertainties, in particular the variation of two coefficients of weighting matrices on wheelset parameters which have significant effect on the lateral displacements and control torques; wi - wheel-rail contact mechanics [8]. input weighting matrix on random and By tuning the parameters of all weighting deterministic track input; 2s - the distances functions, the vehicle performances with the
“wheel – wheel” on wheelset; 1a, 1b - active control can be optimized. The dynamic frequencies of the dynamic weighting on lateral weighting Wf1 has been selected to allow the displacements; 1a, 1b - damping ratios of the wheelsets to follow the low-frequency (below 10 dynamic weighting on lateral displacements; 2a, Hz) elements of the track, which is a compromise
2b - frequencies of the dynamic weighting on between the maximum wheel-rail deflection allowed, and the rejection of high-frequency control torques; 2a, 2b - damping ratios of the dynamic weighting on control torques. components of the track and the high-frequency The resulting controller is then examined perturbations. The second dynamic weighting Wf2 using the –synthesis technique to also ensure its has been set to give a cut off frequency around 12 robustness against not only the parametric Hz mainly to reflect the fact that the bandwidth of
*Corr. Author's Address: Name of institution, Address, City, Country, [email protected] 3 HEAVY MACHINERY - HM 2011, StartPage-EndPage Paper accepted: 00.00.2011 ISBN 978-86-82631-45-3 the current actuator technology feasible for this [5] Wickens, A. H. “Dynamic stability of type of application (hydraulic or electro- articulated and steered railway vehicles mechanical actuators) is normally 15–20 Hz. The guided by lateral displacement feedback,” in coefficients of the two dynamic weightings (k1 Proc. 13th IAVSD Symp., Chengdu, China, and k2) are tuned for the overall tracking 1993 performance and control effort, where k1 = 1 and [6] Wickens, A. H. “Dynamic stability of -7 k2 = 0,8 x 10 are set in the simulation to meet articulated and steered railway vehicles both requirements. Wi1 and Wi2 are constant guided by lateral displacement feedback,” in weighting matrices adjusted to balance the Proc. 13th IAVSD Symp., Chengdu, China, wheelset responses to the random and 1993 deterministic track inputs for the passenger [7] Wickens, A. H. “Dynamic stability of comfort and curving performance. Wi1 is set to articulated and steered railway vehicles unity and the coefficient of Wi2 is tuned in the guided by lateral displacement feedback,” in simulation to be 0.5—a value which gives the Proc. 13th IAVSD Symp., Chengdu, China, best compromise between the performance on 1993 curves and response on random track. Expanding coefficient at different temperature were directly input on the software windows, and the thermo-physical parameters at high temperature can be.
X REFERENCES
[1] Atmadzhova, D. “A model in the studies active steering rotation wheelsets”, VI Triennial International Conference HEAVY [8] Wickens, A. H. “Dynamic stability of MACHINERY HM 2008 MF Kraljevo, 2008 articulated and steered railway vehicles [2] Mei T. X., R. M. Goodall, and H. Li, guided by lateral displacement feedback,” in “Kalman Filter for the State Estimation of a Proc. 13th IAVSD Symp., Chengdu, China, 2-Axle Railway Vehicle,” in Proc. 5th 1993 Europ. Contr. Conf., Karlsruhe, Germany, 1999, CA-10-F812. [3] Šoškić, Z., D. Petrović, N. Bogojević and R. Rakanović, “Suggestions for development of sensors for measurement of forces at wheel- rail contact”. XV SCIENTIFIC CONFERENCE "TRANSPORT 2005" University of Transport, Sofia, 2005 [4] Wickens, A. H. “Dynamic stability of articulated and steered railway vehicles guided by lateral displacement feedback,” in Proc. 13th IAVSD Symp., Chengdu, China, 1993.
*Corr. Author's Address: Name of institution, Address, City, Country, [email protected] 4