How-To Manual Installing a Toolchain for Cortex-M3/STM32 on GNU/Linux
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

KDE 2.0 Development, Which Is Directly Supported
23 8911 CH18 10/16/00 1:44 PM Page 401 The KDevelop IDE: The CHAPTER Integrated Development Environment for KDE by Ralf Nolden 18 IN THIS CHAPTER • General Issues 402 • Creating KDE 2.0 Applications 409 • Getting Started with the KDE 2.0 API 413 • The Classbrowser and Your Project 416 • The File Viewers—The Windows to Your Project Files 419 • The KDevelop Debugger 421 • KDevelop 2.0—A Preview 425 23 8911 CH18 10/16/00 1:44 PM Page 402 Developer Tools and Support 402 PART IV Although developing applications under UNIX systems can be a lot of fun, until now the pro- grammer was lacking a comfortable environment that takes away the usual standard activities that have to be done over and over in the process of programming. The KDevelop IDE closes this gap and makes it a joy to work within a complete, integrated development environment, combining the use of the GNU standard development tools such as the g++ compiler and the gdb debugger with the advantages of a GUI-based environment that automates all standard actions and allows the developer to concentrate on the work of writing software instead of managing command-line tools. It also offers direct and quick access to source files and docu- mentation. KDevelop primarily aims to provide the best means to rapidly set up and write KDE software; it also supports extended features such as GUI designing and translation in con- junction with other tools available especially for KDE development. The KDevelop IDE itself is published under the GNU Public License (GPL), like KDE, and is therefore publicly avail- able at no cost—including its source code—and it may be used both for free and for commer- cial development. -
实战kdevelop进行linux软件开发 2009-02 V0.1
实战KDevelop进行Linux软件开发 2009-02 V0.1 实战KDevelop进行Linux软件开发 陈 浩 2009-02 (Ver. 0.1) MSN: [email protected] Linux开发并不高深,我们需要一个新的角度进行近距离接触! 欢迎指正! Horky ([email protected]) 1. 实战KDevelop进行Linux软件开发 2009-02 V0.1 目录 开始之前.................................................................................................................................................................3 第1章 认识KDevelop.............................................................................................................................................4 1.1简单起步 ........................................................................................................................................................4 1.1.1 一个实例 – Hello, Kdevelop! ..............................................................................................................4 1.1.2 KDevelop的项目组织 ............................................................................................................................6 1.1.3 KDevelop的布局 ....................................................................................................................................8 1.1.4 集成调试环境......................................................................................................................................10 1.2配置KDevelop ..............................................................................................................................................11 第2章 应用程序开发 ...........................................................................................................................................14 -

Fortran Resources 1
Fortran Resources 1 Ian D Chivers Jane Sleightholme October 17, 2020 1The original basis for this document was Mike Metcalf’s Fortran Information File. The next input came from people on comp-fortran-90. Details of how to subscribe or browse this list can be found in this document. If you have any corrections, additions, suggestions etc to make please contact us and we will endeavor to include your comments in later versions. Thanks to all the people who have contributed. 2 Revision history The most recent version can be found at https://www.fortranplus.co.uk/fortran-information/ and the files section of the comp-fortran-90 list. https://www.jiscmail.ac.uk/cgi-bin/webadmin?A0=comp-fortran-90 • October 2020. Added an entry for Nvidia to the compiler section. Nvidia has integrated the PGI compiler suite into their NVIDIA HPC SDK product. Nvidia are also contributing to the LLVM Flang project. • September 2020. Added a computer arithmetic and IEEE formats section. • June 2020. Updated the compiler entry with details of standard conformance. • April 2020. Updated the Fortran Forum entry. Damian Rouson has taken over as editor. • April 2020. Added an entry for Hewlett Packard Enterprise in the compilers section • April 2020. Updated the compiler section to change the status of the Oracle compiler. • April 2020. Added an entry in the links section to the ACM publication Fortran Forum. • March 2020. Updated the Lorenzo entry in the history section. • December 2019. Updated the compiler section to add details of the latest re- lease (7.0) of the Nag compiler, which now supports coarrays and submodules. -
Geany Tutorial
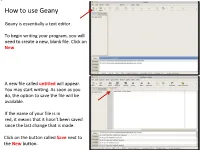
How to use Geany Geany is essentially a text editor. To begin writing your program, you will need to create a new, blank file. Click on New. A new file called untitled will appear. You may start writing. As soon as you do, the option to save the file will be available. If the name of your file is in red, it means that it hasn’t been saved since the last change that is made. Click on the button called Save next to the New button. Save the file in a directory you had previously created before you launched Geany and name it main.cpp. All of the files you will write and submit to will be named specifically main.cpp. Once the .cpp has been specified, Geany will turn on its color coding feature for the C++ template. Next, we will set up our environment and then write a simple program that will print something to the screen Feel free to supply your own name in this small program Before we do anything with it, we will need to configure some options to make your life easier in this class The vertical line to the right marks the ! boundary of your code. You will need to respect this limit in that any line of code you write must not cross this line and therefore be properly, manually broken down to the next line. Your code will be printed out for The line is not where it should be, however, and grading, and if your code crosses the we will now correct it line, it will cause line-wrapping and some points will be deducted. -
Fira Code: Monospaced Font with Programming Ligatures
Personal Open source Business Explore Pricing Blog Support This repository Sign in Sign up tonsky / FiraCode Watch 282 Star 9,014 Fork 255 Code Issues 74 Pull requests 1 Projects 0 Wiki Pulse Graphs Monospaced font with programming ligatures 145 commits 1 branch 15 releases 32 contributors OFL-1.1 master New pull request Find file Clone or download lf- committed with tonsky Add mintty to the ligatures-unsupported list (#284) Latest commit d7dbc2d 16 days ago distr Version 1.203 (added `__`, closes #120) a month ago showcases Version 1.203 (added `__`, closes #120) a month ago .gitignore - Removed `!!!` `???` `;;;` `&&&` `|||` `=~` (closes #167) `~~~` `%%%` 3 months ago FiraCode.glyphs Version 1.203 (added `__`, closes #120) a month ago LICENSE version 0.6 a year ago README.md Add mintty to the ligatures-unsupported list (#284) 16 days ago gen_calt.clj Removed `/**` `**/` and disabled ligatures for `/*/` `*/*` sequences … 2 months ago release.sh removed Retina weight from webfonts 3 months ago README.md Fira Code: monospaced font with programming ligatures Problem Programmers use a lot of symbols, often encoded with several characters. For the human brain, sequences like -> , <= or := are single logical tokens, even if they take two or three characters on the screen. Your eye spends a non-zero amount of energy to scan, parse and join multiple characters into a single logical one. Ideally, all programming languages should be designed with full-fledged Unicode symbols for operators, but that’s not the case yet. Solution Download v1.203 · How to install · News & updates Fira Code is an extension of the Fira Mono font containing a set of ligatures for common programming multi-character combinations. -

Kde-Guide-De-Developpement.Web.Pdf
KDE Published : 2017-06-26 License : GPLv2+ 1 KDE DU POINT DE VUE D'UN DÉVELOPPEUR 1. AVEZ-VOUS BESOIN DE CE LIVRE ? 2. LA PHILOSOPHIE DE KDE 3. COMMENT OBTENIR DE L'AIDE 2 1. AVEZ-VOUS BESOIN DE CE LIVRE ? Vous devriez lire ce livre si vous voulez développer pour KDE. Nous utilisons le terme développement très largement pour couvrir tout ce qui peut conduire à un changement dans le code source, ce qui inclut : Soumettre une correction de bogue Écrire une nouvelle application optimisée par la technologie KDE Contribuer à un projet existant Ajouter de la fonctionnalité aux bibliothèques de développement de KDE Dans ce livre, nous vous livrerons les bases dont vous avez besoin pour être un développeur productif. Nous décrirons les outils que vous devrez installer, montrer comment lire la documentation (et écrire la vôtre propre, une fois que vous aurez créé la nouvelle fonctionnalité !) et comment obtenir de l'aide par d'autres moyens. Nous vous présenterons la communauté KDE, qui est essentielle pour comprendre KDE parce que nous sommes un projet « open source », libre (gratuit). Les utilisateurs finaux du logiciel n'ont PAS besoin de ce livre ! Cependant, ils pourraient le trouver intéressant pour les aider à comprendre comment les logiciels complexes et riches en fonctionnalités qu'ils utilisent ont vu le jour. 3 2. LA PHILOSOPHIE DE KDE Le succès de KDE repose sur une vue globale, que nous avons trouvée à la fois pratique et motivante. Les éléments de cette philosophie de développement comprennent : L'utilisation des outils disponibles plutôt que de ré-inventer ceux existants : beaucoup des bases dont vous avez besoin pour travailler font déjà partie de KDE, comme les bibliothèques principales ou les « Kparts », et sont tout à fait au point. -

Metadefender Core V4.12.2
MetaDefender Core v4.12.2 © 2018 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of Metadefender Core 14 1. Quick Start with Metadefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Scan Files with Metadefender Core 21 2. Installing or Upgrading Metadefender Core 22 2.1. Recommended System Requirements 22 System Requirements For Server 22 Browser Requirements for the Metadefender Core Management Console 24 2.2. Installing Metadefender 25 Installation 25 Installation notes 25 2.2.1. Installing Metadefender Core using command line 26 2.2.2. Installing Metadefender Core using the Install Wizard 27 2.3. Upgrading MetaDefender Core 27 Upgrading from MetaDefender Core 3.x 27 Upgrading from MetaDefender Core 4.x 28 2.4. Metadefender Core Licensing 28 2.4.1. Activating Metadefender Licenses 28 2.4.2. Checking Your Metadefender Core License 35 2.5. Performance and Load Estimation 36 What to know before reading the results: Some factors that affect performance 36 How test results are calculated 37 Test Reports 37 Performance Report - Multi-Scanning On Linux 37 Performance Report - Multi-Scanning On Windows 41 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. Configuring Metadefender Core 50 3.1. Management Console 50 3.2. -

The Glib/GTK+ Development Platform
The GLib/GTK+ Development Platform A Getting Started Guide Version 0.8 Sébastien Wilmet March 29, 2019 Contents 1 Introduction 3 1.1 License . 3 1.2 Financial Support . 3 1.3 Todo List for this Book and a Quick 2019 Update . 4 1.4 What is GLib and GTK+? . 4 1.5 The GNOME Desktop . 5 1.6 Prerequisites . 6 1.7 Why and When Using the C Language? . 7 1.7.1 Separate the Backend from the Frontend . 7 1.7.2 Other Aspects to Keep in Mind . 8 1.8 Learning Path . 9 1.9 The Development Environment . 10 1.10 Acknowledgments . 10 I GLib, the Core Library 11 2 GLib, the Core Library 12 2.1 Basics . 13 2.1.1 Type Definitions . 13 2.1.2 Frequently Used Macros . 13 2.1.3 Debugging Macros . 14 2.1.4 Memory . 16 2.1.5 String Handling . 18 2.2 Data Structures . 20 2.2.1 Lists . 20 2.2.2 Trees . 24 2.2.3 Hash Tables . 29 2.3 The Main Event Loop . 31 2.4 Other Features . 33 II Object-Oriented Programming in C 35 3 Semi-Object-Oriented Programming in C 37 3.1 Header Example . 37 3.1.1 Project Namespace . 37 3.1.2 Class Namespace . 39 3.1.3 Lowercase, Uppercase or CamelCase? . 39 3.1.4 Include Guard . 39 3.1.5 C++ Support . 39 1 3.1.6 #include . 39 3.1.7 Type Definition . 40 3.1.8 Object Constructor . 40 3.1.9 Object Destructor . -

Php Editor Mac Freeware Download
Php editor mac freeware download Davor's PHP Editor (DPHPEdit) is a free PHP IDE (Integrated Development Environment) which allows Project Creation and Management, Editing with. Notepad++ is a free and open source code editor for Windows. It comes with syntax highlighting for many languages including PHP, JavaScript, HTML, and BBEdit costs $, you can also download a free trial version. PHP editor for Mac OS X, Windows, macOS, and Linux features such as the PHP code builder, the PHP code assistant, and the PHP function list tool. Browse, upload, download, rename, and delete files and directories and much more. PHP Editor free download. Get the latest version now. PHP Editor. CodeLite is an open source, free, cross platform IDE specialized in C, C++, PHP and ) programming languages which runs best on all major Platforms (OSX, Windows and Linux). You can Download CodeLite for the following OSs. Aptana Studio (Windows, Linux, Mac OS X) (FREE) Built-in macro language; Plugins can be downloaded and installed from within jEdit using . EditPlus is a text editor, HTML editor, PHP editor and Java editor for Windows. Download For Mac For macOS or later Release notes - Other platforms Atom is a text editor that's modern, approachable, yet hackable to the core—a tool. Komodo Edit is a simple, polyglot editor that provides the basic functionality you need for programming. unit testing, collaboration, or integration with build systems, download Komodo IDE and start your day trial. (x86), Mac OS X. Download your free trial of Zend Studio - the leading PHP Editor for Zend Studio - Mac OS bit fdbbdea, Download. -

Anjuta 1.2.0
Ulasan CD | Klinik | Ulasan | Linux Ready | Utama | Bisnis | Feature | Tutorial SOFTWARE Hasil Tes dan Ulasan Software Anjuta 1.2.0 ALAT BANTU PEMROGRAMAN Sifat: Free software Lisensi: GPL Pengembang: Naba Kumar Situs web: http://anjuta.org nda termasuk developer yang senang menggunakan program- A program sederhana dalam menulis kode program? Kalau ya, barangkali Anda puas dengan editor Vim. Dengan syntax highlighting dan fasilitas pemrograman Anjuta IDE lainnya, Vim termasuk alat bantu pemrograman yang menyenangkan. Hal tersebut belum lagi ditambah dengan program terlihat rapi. Begitu tubuh fungsi pengamatan nilai register, signal kernel, fasilitas pencarian dan penggantian teks disembunyikan, maka yang terlihat breakpoint, memory dump, dan lain yang dapat diketikkan dengan mudah lewat hanyalah nama fungsinya. Menarik, bukan? sebagainya? Tenang saja. Anjuta dapat keyboard. Masih bicara tampilan, kita perlu memuji menampilkannya untuk Anda. Tinggal pilih Tapi, Vim memiliki sejumlah besar pewarnaan yang digunakan oleh Anjuta. menunya dan dalam sekejap, apa yang keterbatasan. Vim sendiri sejatinya adalah Anjuta akan memberikan warna-warna Anda inginkan sudah terpampang. Lebih teks editor biasa. Apabila Anda ingin khusus untuk sesuatu yang termasuk cepat dari sulap! mendapatkan sejumlah besar kemampuan istimewa, misalnya keyword bahasa Secara umum, fasilitas debugging pada Vim dan sekaligus memiliki yang lebih, pemrograman, komentar, sampai isi dari Anjuta pun perlu diberikan acungan jempol. maka Anjutalah pilihannya. suatu konstanta ataupun variabel tipe Fasilitas debugging dibangun di atas gdb, Anjuta adalah IDE untuk C/C++, tertentu. Dan pewarnaan yang dilakukan yang merupakan debugger populer. Anda walaupun dengan mudah dapat digunakan pun cukup menarik. Anjuta akan dapat mengeksekusi interaktif, pengamatan oleh bahasa pemrograman lain. Sebagai memberikan warna kabur terlebih dahulu nilai-nilai tertentu, manipulasi stack, dan contoh, penulis bersenang hati pada saat pengetikan. -
Smart Home Automation with Linux Smart
CYAN YELLOW MAGENTA BLACK PANTONE 123 C BOOKS FOR PROFESSIONALS BY PROFESSIONALS® THE EXPERT’S VOICE® IN LINUX Companion eBook Available Smart Home Automation with Linux Smart Dear Reader, With this book you will turn your house into a smart and automated home. You will learn how to put together all the hardware and software needed for Automation Home home automation, to control appliances such as your teakettle, CCTV, light switches, and TV. You’ll be taught about the devices you can build, adapt, or Steven Goodwin, Author of hack yourself from existing technology to accomplish these goals. Cross-Platform Game In Smart Home Automation with Linux, you’ll discover the scope and possi- Programming bilities involved in creating a practical digital lifestyle. In the realm of media and Game Developer’s Open media control, for instance, you’ll learn how you can read TV schedules digitally Source Handbook and use them to program video remotely through e-mail, SMS, or a web page. You’ll also learn the techniques for streaming music and video from one machine to another, how to give your home its own Twitter and e-mail accounts for sending automatic status reports, and the ability to remotely control the home Smart Home lights or heating system. Also, Smart Home Automation with Linux describes how you can use speech synthesis and voice recognition systems as a means to converse with your household devices in new, futuristic, ways. Additionally, I’ll also show you how to implement computer-controlled alarm clocks that can speak your daily calendar, news reports, train delays, and local with weather forecasts. -

Editors Desk ...2
The content of this magazine is released under the Creative Commons Attribution-Share Alike 3.0 Unported license. For more information visit user http://creativecommons.org/licenses/by-sa/3.0 TM Issue #1 - April 2009 EDITORS DESK ................................ 2 COMMUNITY NEWS ........................ 3 CHOOSING A DE/WM ...................... 4 HARDENING SSH IN 60 SECONDS .................................... 6 GAMERS CORNER .......................... 9 TIPS & TRICKS ............................... 10 PIMP MY ARCH .............................. 11 SOFTWARE REVIEW ......................12 Q&A ..................................................14 EEDDIITTOORRSS DDEESSKK Welcome to the first issue of Arch User Magazine! ARCH USER STAFF Daniel Griffiths (Ghost1227) ........... Editor ello, and thank you for picking up issue #1 of Arch User Magazine! While David Crouse (Crouse) .......... Contributor the vast majority of you probably know me (or have at least seen me H around the forums), I feel that I should take a moment to introduce myself. My name is Daniel Griffiths, and I am a 26-year-old independent contractor in Delaware, US. Throughout my life, I have wandered through various UNIX/Linux systems including (but not limited to) MINIX, RedHat, Mandrake, Slackware, Gentoo, Debian, and even two home made distributions based on Linux From Scratch. I finally found Arch in 2007 and instantly fell in love with its elegant simplicity. Some of our more attentive readers may note that Arch already has a monthly newsletter. With the existence of the aformentioned newsletter, what is the point of adding another news medium to the mix? Fear not, newsletter readers, I have no intention of letting Arch User Magazine take the place of the newsletter. In fact, Arch User Magazine and the newsletter are intended to fill two very different needs in the Arch community.