Design, Construction and Control of an Industrial Scale Biped Robot Joe
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Class 2 - the 2004 Red Sox - Agenda
The 2004 Red Sox Class 2 - The 2004 Red Sox - Agenda 1. The Red Sox 1902- 2000 2. The Fans, the Feud, the Curse 3. 2001 - The New Ownership 4. 2004 American League Championship Series (ALCS) 5. The 2004 World Series The Boston Red Sox Winning Percentage By Decade 1901-1910 11-20 21-30 31-40 41-50 .522 .572 .375 .483 .563 1951-1960 61-70 71-80 81-90 91-00 .510 .486 .528 .553 .521 2001-10 11-17 Total .594 .549 .521 Red Sox Title Flags by Decades 1901-1910 11-20 21-30 31-40 41-50 1 WS/2 Pnt 4 WS/4 Pnt 0 0 1 Pnt 1951-1960 61-70 71-80 81-90 91-00 0 1 Pnt 1 Pnt 1 Pnt/1 Div 1 Div 2001-10 11-17 Total 2 WS/2 Pnt 1 WS/1 Pnt/2 Div 8 WS/13 Pnt/4 Div The Most Successful Team in Baseball 1903-1919 • Five World Series Champions (1903/12/15/16/18) • One Pennant in 04 (but the NL refused to play Cy Young Joe Wood them in the WS) • Very good attendance Babe Ruth • A state of the art Tris stadium Speaker Harry Hooper Harry Frazee Red Sox Owner - Nov 1916 – July 1923 • Frazee was an ambitious Theater owner, Promoter, and Producer • Bought the Sox/Fenway for $1M in 1916 • The deal was not vetted with AL Commissioner Ban Johnson • Led to a split among AL Owners Fenway Park – 1912 – Inaugural Season Ban Johnson Charles Comiskey Jacob Ruppert Harry Frazee American Chicago NY Yankees Boston League White Sox Owner Red Sox Commissioner Owner Owner The Ruth Trade Sold to the Yankees Dec 1919 • Ruth no longer wanted to pitch • Was a problem player – drinking / leave the team • Ruth was holding out to double his salary • Frazee had a cash flow crunch between his businesses • He needed to pay the mortgage on Fenway Park • Frazee had two trade options: • White Sox – Joe Jackson and $60K • Yankees - $100K with a $300K second mortgage Frazee’s Fire Sale of the Red Sox 1919-1923 • Sells 8 players (all starters, and 3 HOF) to Yankees for over $450K • The Yankees created a dynasty from the trading relationship • Trades/sells his entire starting team within 3 years. -

The 112Th World Series Chicago Cubs Vs
THE 112TH WORLD SERIES CHICAGO CUBS VS. CLEVELAND INDIANS SUNDAY, OCTOBER 30, 2016 GAME 5 - 7:15 P.M. (CT) FIRST PITCH WRIGLEY FIELD, CHICAGO, ILLINOIS 2016 WORLD SERIES RESULTS GAME (DATE RESULT WINNING PITCHER LOSING PITCHER SAVE ATTENDANCE Gm. 1 - Tues., Oct. 25th CLE 6, CHI 0 Kluber Lester — 38,091 Gm. 2 - Wed., Oct. 26th CHI 5, CLE 1 Arrieta Bauer — 38,172 Gm. 3 - Fri., Oct. 28th CLE 1, CHI 0 Miller Edwards Allen 41,703 Gm. 4 - Sat., Oct. 29th CLE 7, CHI 2 Kluber Lackey — 41,706 2016 WORLD SERIES SCHEDULE GAME DAY/DATE SITE FIRST PITCH TV/RADIO 5 Sunday, October 30th Wrigley Field 8:15 p.m. ET/7:15 p.m. CT FOX/ESPN Radio Monday, October 31st OFF DAY 6* Tuesday, November 1st Progressive Field 8:08 p.m. ET/7:08 p.m. CT FOX/ESPN Radio 7* Wednesday, November 2nd Progressive Field 8:08 p.m. ET/7:08 p.m. CT FOX/ESPN Radio *If Necessary 2016 WORLD SERIES PROBABLE PITCHERS (Regular Season/Postseason) Game 5 at Chicago: Jon Lester (19-5, 2.44/2-1, 1.69) vs. Trevor Bauer (12-8, 4.26/0-1, 5.00) Game 6 at Cleveland (if necessary): Josh Tomlin (13-9, 4.40/2-0/1.76) vs. Jake Arrieta (18-8, 3.10/1-1, 3.78) SERIES AT 3-1 CUBS AND INDIANS IN GAME 5 This marks the 47th time that the World Series stands at 3-1. Of • The Cubs are 6-7 all-time in Game 5 of a Postseason series, the previous 46 times, the team leading 3-1 has won the series 40 including 5-6 in a best-of-seven, while the Indians are 5-7 times (87.0%), and they have won Game 5 on 26 occasions (56.5%). -

2019 Panini Flawless Baseball Checklist
Card Set Number Player Team Seq. All-Stars 41 Mike Trout Los Angeles Angels 20 All-Stars 42 Aaron Judge New York Yankees 20 All-Stars 43 Cody Bellinger Los Angeles Dodgers 20 All-Stars 44 Kirby Puckett Minnesota Twins 20 All-Stars 45 Mickey Mantle New York Yankees 20 All-Stars 46 Roger Maris New York Yankees 20 All-Stars 47 Roy Campanella Brooklyn Dodgers 20 All-Stars 48 Pedro Martinez Boston Red Sox 20 All-Stars 49 Ken Griffey Jr. Seattle Mariners 20 All-Stars 50 Joe Cronin Boston Red Sox 20 All-Stars 51 Mariano Rivera New York Yankees 20 All-Stars 52 Randy Johnson Arizona Diamondbacks 20 All-Stars 53 Ted Williams Boston Red Sox 20 All-Stars 54 Babe Ruth New York Yankees 20 All-Stars 55 Bob Gibson St. Louis Cardinals 20 All-Stars Black 41 Mike Trout Los Angeles Angels 1 All-Stars Black 42 Aaron Judge New York Yankees 1 All-Stars Black 43 Cody Bellinger Los Angeles Dodgers 1 All-Stars Black 44 Kirby Puckett Minnesota Twins 1 All-Stars Black 45 Mickey Mantle New York Yankees 1 All-Stars Black 46 Roger Maris New York Yankees 1 All-Stars Black 47 Roy Campanella Brooklyn Dodgers 1 All-Stars Black 48 Pedro Martinez Boston Red Sox 1 All-Stars Black 49 Ken Griffey Jr. Seattle Mariners 1 All-Stars Black 50 Joe Cronin Boston Red Sox 1 All-Stars Black 51 Mariano Rivera New York Yankees 1 All-Stars Black 52 Randy Johnson Arizona Diamondbacks 1 All-Stars Black 53 Ted Williams Boston Red Sox 1 All-Stars Black 54 Babe Ruth New York Yankees 1 All-Stars Black 55 Bob Gibson St. -
Printer-Friendly Version (PDF)
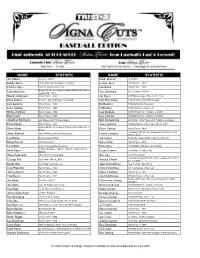
NAME STATISTIC NAME STATISTIC Jim Abbott No-Hitter 9/4/93 Ralph Branca 3x All-Star Bobby Abreu 2005 HR Derby Champion; 2x All-Star George Brett Hall of Fame - 1999 Tommie Agee 1966 AL Rookie of the Year Lou Brock Hall of Fame - 1985 Boston #1 Overall Prospect-Named 2008 Boston Minor Lars Anderson Tom Browning Perfect Game 9/16/88 League Off. P.O.Y. Sparky Anderson Hall of Fame - 2000 Jay Bruce 2007 Minor League Player of the Year Elvis Andrus Texas #1 Overall Prospect -shortstop Tom Brunansky 1985 All-Star; 1987 WS Champion Luis Aparicio Hall of Fame - 1984 Bill Buckner 1980 NL Batting Champion Luke Appling Hall of Fame - 1964 Al Bumbry 1973 AL Rookie of the Year Richie Ashburn Hall of Fame - 1995 Lew Burdette 1957 WS MVP; b. 11/22/26 d. 2/6/07 Earl Averill Hall of Fame - 1975 Ken Caminiti 1996 NL MVP; b. 4/21/63 d. 10/10/04 Jonathan Bachanov Los Angeles AL Pitching prospect Bert Campaneris 6x All-Star; 1st to Player all 9 Positions in a Game Ernie Banks Hall of Fame - 1977 Jose Canseco 1986 AL Rookie of the Year; 1988 AL MVP Boston #4 Overall Prospect-Named 2008 Boston MiLB Daniel Bard Steve Carlton Hall of Fame - 1994 P.O.Y. Philadelphia #1 Overall Prospect-Winning Pitcher '08 Jesse Barfield 1986 All-Star and Home Run Leader Carlos Carrasco Futures Game Len Barker Perfect Game 5/15/81 Joe Carter 5x All-Star; Walk-off HR to win the 1993 WS Marty Barrett 1986 ALCS MVP Gary Carter Hall of Fame - 2003 Tim Battle New York AL Outfield prospect Rico Carty 1970 Batting Champion and All-Star 8x WS Champion; 2 Bronze Stars & 2 Purple Hearts Hank -

Illustrated Current News Posters
Illustrated Current News Posters – Baseball Subjects ICN Num Year Date Player(s) Poster Title Team(s) 140 1914 Rabbit Maranville/Johnny Evers/Braves Group Shot The Boston Nationals The Sensation of the Season Braves 1915 Babe Ruth/Collins/Alexander Red Sox 1915 Honus Wagner/Grover Alexander Pirates/Phillies 253 1915 Rabbit Maranville - Stallings Braves 1917 Walter Johnson Senators 1882 1925 14-Oct Bill McKechnie (Mgr.)/Bucky Harris (Mgr.) The President Throw Out the First Ball in Washington Pirates/Senators 2007 1926 2-Aug Hal Rhyne Hitter with "Magnifying Eyes" Who Helped Put Pirates in First Place Pirates 2033 1926 Ticker Tape Parade (no players) Cardinals 2035 1926 Upper Deck Shot from 1926 World Series Cardinals Yankees 2037 1926 11-Oct Babe Ruth This is How Ruth Hits 'Em Out of the Park! Yankees 2070 1926 27-Dec Ban Johnson/Mountain Landis Landis Retained for Seven More Years with Increase in Salary Reds 1927 Dutch Leonard Dodgers/Yankees 2094 1927 Babe Ruth Yankees 2099 1927 Rogers Hornsby/John McGraw/McEvoy Senators/Giants 2105 1927 Nick Altroc/Billy Sunday Senators 2173 1927 Paul Waner/Lloyd Waner Pirates 2214 1927 Nick Altrock Senators 1927 Chick Gandil/Risberg/Mountain Landis White Sox/Black Sox 2649 1930 8-Sep Hack Wilson The Eyes Behind the Brawn Cubs 2664 1930 13-Oct Hack Wilson/Cliff Heathcote/Gabby Hartnett/Kiki Cuyler Diamond Stars Take to Stage Cubs 1931 Rogers Hornsby w/team Cubs 3038 1931 Del Bissonette /Cubs group Cubs/Dodgers 2973 1932 Billy Herman/Lou Gehrig/Grimm/Cuyler Yankees - Cubs 3012 1933 Jimmy Foxx/montage of 11 Athletes Athletics 3013 1933 4-Jan Babe Ruth "Bambino" Tunes Up for His 1933 Campaign Yankees 3049 1933 Babe Ruth Yankees 3201 1934 19-Mar Babe Ruth/Lou Gehrig Baseball Big Guns in Action Yankees 3251 1934 13-Jul Simmons/Gehrig/Ruth/Foxx/Frisch/Hubbell/Gomez/Terry/Cronin American League All-Stars Triumph Over National League All-Stars Yankees/Giants 3278 1934 14-Sep Tigers Team Photo, Mickey Cochrane Mgr. -

Congressional Record—House H9991
November 18, 2004 CONGRESSIONAL RECORD — HOUSE H9991 Congratulations to the entire Red Sox team, Whereas Derrek Lowe, Pedro Martinez, and Amendment to the preamble offered by Mr. who will be remembered forever as the con- Curt Schilling delivered gutsy pitching per- OSE: quering heroes who Reversed the Curse and formances in the postseason worthy of their On page 1 line 10 strike the word ‘‘payoff’’ status as some of the best pitchers in Red and insert the ward ‘‘playoff’’. brought a baseball championship to New Eng- Sox history; land for the first time since the Wilson Admin- Mr. OSE. Mr. Speaker, I do want to Whereas the Red Sox starting pitching in speak to the amendment, if I might, istration. (Woodrow Wilson, not Mookie.) Games 2, 3, and 4 of the World Series had a Congratulations also to all the great Red combined earned run average of 0.00; because I know the gentleman from Sox players of the past, including Johnny Whereas Manny Ramirez won the 2004 Massachusetts (Mr. CAPUANO) comes Pesky, Dom Dimaggio, Carl Yastrzemski, Jim World Series Most Valuable Player award in from district eight in Massachusetts, Rice, and Luis Tiant—this victory was as the World Series after batting 0.350 in the and clearly there has been an error in much for them as anyone., The same can be postseason with two home runs and 11 runs the third paragraph of the resolution. said of Ted Williams and all the other Sox batted in; We are going to call this E–8 in the Whereas the Red Sox staged the greatest gentleman from Massachusetts’ (Mr. -

Who Are the 25 Greatest Red Sox of All Time?
Comments Subscribe Members Starting at 99 cents Sign In BOB RYAN Who are the 25 greatest Red Sox of all time? STAN GROSSFELD/GLOBE STAFF David Ortiz joins the Babe as threetime Red Sox World Series winners. By Bob Ryan GLOBE CORRESPONDENT NOVEMBER 03, 2013 Now that David Ortiz has become the most-decorated Red Sox player of the 21st century, and now that his transcendent World Series performance has enhanced his Hall of Fame résumé, a question arises: Where does Big Papi rank in the pantheon of all-time Red Sox greats? Here’s what I’m thinking: 25. Smoky Joe Wood, RHP (190815) A must, if only because of 1912, when he went 34-5 with a 1.91 ERA with 10 shutouts, before winning three games in the World Series. He was 117- 56 with the Sox, before his arm went dead and he reinvented himself as a Cleveland outfielder. I’ve always thought if I could be any 20th century athlete at any point in time it would be the 22-year-old Smoky Joe Wood in 1912. 24. Mel Parnell, LHP (194756) 123-75 (.621) with a pair of 20-win seasons, including a dazzling 25-7, 2.77 showing in 1949. A Sox lifer and later a Sox broadcaster. Threw a no- no on July 14, 1956. 23. Dwight Evans, RF (197290) Owned right field, as everyone knows (eight Gold Gloves), but he also banged out 2,446 hits and finished with a career OPS of .840, four times posting an OPS over .900. -

Boston Red Sox Media Relations Department
World Series Champions: 1903, 1912, 1915, 1916, 1918, 2004, 2007 American League Champions: 1903, 1904, 1912, 1915, 1916, 1918, 1946, 1967, 1975, 1986, 2004, 2007 American League East Division Champions: 1975, 1986, 1988, 1990, 1995, 2007 American League Wild Card: 1998, 1999, 2003, 2004, 2005, 2008, 2009 For Immediate Release December 1, 2011 RED SOX NAME BOBBY VALENTINE 45th MANAGER IN CLUB HISTORY BOSTON, MA—The Boston Red Sox today named Bobby Valentine as the 45th manager in the club’s 111- year history. Valentine agreed to terms on a two-year contract with club options for 2014 and 2015. No further terms were disclosed. The announcement was made by Executive Vice President/General Manager Ben Cherington. “We are thrilled to welcome Bobby as the manager of the Red Sox, and I’m eager to begin working closely with him in our preparations for the 2012 season,” said Cherington. “He is one of the brightest baseball minds I have encountered, with a wealth of experience in the game, an unmatched passion for winning and a proven track record of success in demanding environments. In Bobby, we have the right man to lead the Red Sox.” A veteran of more than 40 years in professional baseball, Valentine has previously served parts of 15 seasons as a Major League manager with the Texas Rangers (1985-92) and New York Mets (1996-2002), compiling a 1,117-1,072 (.510) record. He ranks fourth among active managers in games and fifth in wins. The Stamford, CT native becomes the sixth Red Sox manager born in New England and the second from Connecticut, joining Meriden’s Jack Barry, who managed the club in 1917. -

Page 1.412.Indd
BOSTON RED SOX (5-6) at NEW YORK YANKEES (5-6) Saturday, April 12, 2014 • 1:05 p.m. ET • Yankee Stadium, Bronx, NY RHP John Lackey (2-0, 1.38 ERA) vs. RHP Hiroki Kuroda (1-1, 2.92) Game #12 • Road Game #6 • TV: NESN/FS1 • Radio: WEEI 93.7 FM, WCCM 1110 AM (Spanish) STATE OF THE SOX: The Red Sox defeated the Yankees STRONG ARMS: Red Sox pitchers have the 4th-best ERA 4-2 last night to even their 4-game series in the Bronx at in the AL this season at 3.45 (38 ER/99.0 IP)...The club leads REGULAR SEASON BREAKDOWN 1-1...Boston has taken 2 of its last 3 games and 3 of the the AL in both walk rate (2.1, 23 BB) and strikeout-to-walk Overall ............................................. 5-6 club’s last 5 contests. ratio (4.0, 93 SO), trailing only San Francisco (1.7 BB/9.0 IP, AL East Standing ..................5th, 1.0 GB 4.8 SO/BB ratio) among ML teams. At Home ........................................... 2-4 At 5-6, Boston is 2 wins off the pace of the 2013 On Road ........................................... 3-2 team, which started 7-4...The Sox also had a losing The Sox rank 5th in the AL in strikeouts (93) and have In day games .................................... 1-3 record through their first 11 games in each of the 5 the 3rd-fewest walks allowed (23). In night games ................................. 4-3 seasons preceding 2013: 4-7 in 2012, 2-9 in 2011, 4-7 April ................................................ -

2021 Topps Diamond Icons Checklist Baseball
2021 Diamond Icons Baseball Player Card Totals MLB TOTAL AUTO Auto Diamond Other PLAYER AUTO Logo CARDS Diamond Relic Relic Relic Patch Aaron Judge 249 164 4 48 32 1 Aaron Nola 123 82 41 Adrian Beltre 82 82 Al Barlick 5 5 Al Kaline 10 10 Al Lopez 5 5 Albert Pujols 20 4 16 Alec Bohm 152 123 6 6 16 1 Alex Bregman 17 16 1 Alex Kirilloff 135 123 6 6 Alex Rodriguez 89 41 32 16 Andre Dawson 114 82 32 Andrew McCutchen 123 82 41 Andrew Vaughn 41 41 Andy Pettitte 123 82 41 Anthony Rendon 82 82 Anthony Rizzo 17 16 1 Babe Ruth 7 1 6 Barry Larkin 196 164 16 16 Bernie Williams 41 41 Bill Dickey 5 5 Bill Terry 5 5 Bill Veeck 5 5 Billy Herman 5 5 Bo Bichette 23 6 16 1 Bob Feller 10 10 Bob Friend 5 5 Bob Gibson 5 5 Bob Lemon 10 10 Bobby Dalbec 82 82 Bobby Doerr 10 10 Bobby Murcer 5 5 Bobby Richardson 10 10 Bobby Thomson 10 10 Brooks Robinson 139 123 16 GroupBreakChecklists.com 2021 Diamond Icons Baseball Player Card Totals MLB TOTAL AUTO Auto Diamond Other PLAYER AUTO Logo CARDS Diamond Relic Relic Relic Patch Bryce Harper 196 82 11 64 6 32 1 Buck Leonard 5 5 Bucky Harris 5 5 Burleigh Grimes 10 10 Buster Posey 58 41 16 1 Cal Ripken Jr. 202 123 15 48 16 Carl Furillo 5 5 Carl Hubbell 10 10 Carl Yastrzemski 114 82 16 16 Carlos Correa 7 6 1 Carlton Fisk 139 123 16 Casey Mize 176 164 6 6 Casey Stengel 1 1 CC Sabathia 82 41 41 Cecil Fielder 41 41 Charlie Gehringer 10 10 Chick Hafey 5 5 Chipper Jones 176 123 4 32 16 1 Chris Sale 6 6 Christian Yelich 177 82 11 61 22 1 Clayton Kershaw 17 16 1 Cody Bellinger 105 41 41 22 1 Connie Mack 1 1 Corey Seager 42 41 1 -

Ocm39986874-1956-SB-0744.Pdf (252.9Kb)
I SENATE 744 Cfcc Commontoealtft of Qiassac&usctts Senate, July 19, 1956. The committees on Rules, to whom was referred the Senate Resolutions in behalf of Joseph E. Cronin upon his selection to baseball’s hall of fame (Senate, No. 744), report recommending that the same ought to be adopted. For the committees, MAURICE A. DONAHUE. 9 SENATE No. 744. [July [Senate, No. 744. Offered by Senator Quigley.] Cfte Commontoealtf) of Massachusetts In the Year One Thousand Nine Hundred and Fifty-Six. Resolutions in behalf of Joseph e. cronin upon his SELECTION TO BASEBALL’S HALL OF FAME. Whereas, Joseph E. Cronin of Newton, General Manager of the Boston Red Sox. long known to all followers of the national pastime because of his sparkling performances as player and manager of the Washington Senators and the Boston Red Sox, respectively, has been selected for mem- bership in the National Baseball Hall of Fame where his name will be enshrined with the select group of baseball’s immortals; and Whereas, This high honor conferred upon Joe Cronin is not only because of his ability and performance as a fielder and hitter, but also because of his determination to conquer any weakness in his play and to excel in his profession, his perseverance, his fierce competitive spirit, and his ability to come through when the odds were against him; and Whereas, Joe Cronin’s fighting qualities as a competitor and leader, his ability to come through in the pinch, his gentlemanly conduct, both on and off the playing field, and his affable manner have endeared him to all followers of our national pastime and to all who came in contact with him; and Whereas, Friday night, July twentieth, has been desig- nated as Joe Cronin Night at Fenway Park and appropri- 4 ate exercises will be held in honor of the nomination of Joe Cronin to baseball’s Hall of Fame; therefore be it Resolved, That the Massachusetts Senate takes this occasion to express the sentiment of the people of the commonwealth in extending congratulations and best wishes 1956.] SENATE No. -
The Science of Hitting Ted Williams and John Underwood
The Science of Hitting Ted Williams and John Underwood 1970 To the young baseball players of America, who dream, as I did, of becoming great hitters. May this help them on their way. Hitting A baseball—I’ve said it a thousand times—is the single most difficult thing to do in sport. I get raised eyebrows and occasional arguments when I say that, but what is there that is harder to do? What is there that requires more natural ability, more physical dexterity, more mental alertness? That requires a greater finesse to go with physical strength, that has as many variables and as few constants, and that carries with it the continuing frustration of knowing that even if you are a .300 hitter—which is a rare item these days—you are going to fail at your job seven out of ten times? If Joe Namath or Roman Gabriel completed three of every ten passes they attempted, they would be ex-professional quarterbacks. If Oscar Robertson or Rick Barry made three of every ten shots they took, their coaches would take the basketball away from them. Golf? Somebody always mentions golf. You don’t have to have good eyesight to play golf. Tommy Armour was a terrific golfer, and he had no sight in one eye. You have to have good eyesight to hit a baseball. Look at Tony Conigliaro of the Red Sox. Six foot three, beautifully developed, strong, aggressive, stylish, and an injured eye almost ended his career. He can still see all right—the impairment is slight—but there is a question whether he sees well enough to hit.