John Harrison and the Nonlinear Spring
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
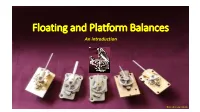
Floating and Platform Balances an Introduction
Floating and Platform Balances An introduction ©Darrah Artzner 3/2018 Floating and Platform Balances • Introduce main types • Discuss each in some detail including part identification and function • Testing and Inspecting • Cleaning tips • Lubrication • Performing repairs Balance Assembly Type Floating Platform Floating Balance Frame Spring stud Helicoid spring Hollow Tube Mounting Post Regulator Balance wheel Floating Balance cont. Jewel Roller Pin Paired weight Hollow Tube Safety Roller Pivot Wire Floating Balance cont. Example Retaining Hermle screws Safety Roller Note: moving fork Jewel cover Floating Balance cont. Inspecting and Testing (Balance assembly is removed from movement) • Inspect pivot (suspension) wire for distortion, corrosion, breakage. • Balance should appear to float between frame. Top and bottom distance. • Balance spring should be proportional and not distorted in any way. • Inspect jewels for cracks and or breakage. • Roller pin should be centered when viewed from front. (beat) • Rotate balance wheel three quarters of a turn (270°) and release. It should rotate smoothly with no distortion and should oscillate for several (3) minutes. Otherwise it needs attention. Floating Balance cont. Cleaning • Make sure the main spring has been let down before working on movement. • Use non-aqueous watch cleaner and/or rinse. • Agitate in cleaner/rinse by hand or briefly in ultrasonic. • Rinse twice and final in naphtha, Coleman fuel (or similar) or alcohol. • Allow to dry. (heat can be used with caution – ask me how I would do it.) Lubrication • There are two opinions. To lube or not to lube. • Place a vary small amount of watch oil on to the upper and lower jewel where the pivot wire passed through the jewel holes. -

A Brief History of the Great Clock at Westminster Palace
A Brief History of the Great Clock at Westminster Palace Its Concept, Construction, the Great Accident and Recent Refurbishment Mark R. Frank © 2008 A Brief History of the Great Clock at Westminster Palace Its Concept, Construction, the Great Accident and Recent Refurbishment Paper Outline Introduction …………………………………………………………………… 2 History of Westminster Palace………………………………………………... 2 The clock’s beginnings – competition, intrigues, and arrogance …………... 4 Conflicts, construction and completion …………………………………….. 10 Development of the gravity escapement ……………………………………. 12 Seeds of destruction ………………………………………………………….. 15 The accident, its analysis and aftermath …………………………………… 19 Recent major overhaul in 2007 ……………………………………………... 33 Appendix A …………………………………………………………………... 40 Footnotes …………………………………………………………………….. 41 1 Introduction: Big Ben is a character, a personality, the very heart of London, and the clock tower at the Houses of Parliament has become the symbol of Britain. It is the nation’s clock, instantly recognizable, and brought into Britain’s homes everyday by the BBC. It is part of the nation’s heritage and has long been established as the nation’s timepiece heralding almost every broadcast of national importance. On the morning of August 5th 1976 at 3:45 AM a catastrophe occurred to the movement of the great clock in Westminster Palace. The damage was so great that for a brief time it was considered to be beyond repair and a new way to move the hands on the four huge exterior dials was considered. How did this happen and more importantly why did this happen and how could such a disaster to one of the world’s great horological treasures be prevented from happening again? Let us first go through a brief history leading up to the creation of the clock. -

Pb3005 Marine Timekeepers
Marine Timekeepers 16 February 1993 Four stamps commemorating the 300th The stamps were designed by Howard anniversary of the birth of John Harrison, who Brown, a freelance graphic designer working in perfected the Marine Chronometer, go on sale London. Previous work for Royal Mail include at post offices, the British Philatelic Bureau, designing a booklet on the history of British films Collections, and philatelic counters on 16 in 1985, and a set of stamps to mark the February. The stamps feature different layers of bicentenary of Ordnance Survey in 1991. Harrisons “H4” Clock (one of five prototypes, now known as Hl — H5), completed in 1759. The Technical Details clocks can be seen at the National Maritime Museum, Greenwich. Printer: The House of Questa Process: Offset lithography Size: 35 X 37mm, “almost square” Sheets: 1(X) Perforation: 14 x 14Y2 Phosphor: Phosphor Coated Paper Gum: PVA Presentation Pack: No 235, price £1.55 Stamp Cards: Nos 150A-D, price 21 p each. First Day Facilities Unstamped Royal Mail first day cover envelopes will be available from main post offices, the Bureau, Collections, and philatelic counters approximately two weeks before 16 February, price 21 p. The values cover the inland 1 st Class and EC basic rates (24p), Europe, non-EC basic rate (28p); worldwide postcard rate (33p); and basic airmail letter rate (39p). The 24p stamp shows a decorated enamel dial with precision centre-seconds indication. The 28p stamp shows the escapement, remontoire and fusee with automatic ‘maintaining power’. The 33p stamp shows the timekeeping element, including balance and spring and bimetallic temperature compensation. -

Pioneers in Optics: Christiaan Huygens
Downloaded from Microscopy Pioneers https://www.cambridge.org/core Pioneers in Optics: Christiaan Huygens Eric Clark From the website Molecular Expressions created by the late Michael Davidson and now maintained by Eric Clark, National Magnetic Field Laboratory, Florida State University, Tallahassee, FL 32306 . IP address: [email protected] 170.106.33.22 Christiaan Huygens reliability and accuracy. The first watch using this principle (1629–1695) was finished in 1675, whereupon it was promptly presented , on Christiaan Huygens was a to his sponsor, King Louis XIV. 29 Sep 2021 at 16:11:10 brilliant Dutch mathematician, In 1681, Huygens returned to Holland where he began physicist, and astronomer who lived to construct optical lenses with extremely large focal lengths, during the seventeenth century, a which were eventually presented to the Royal Society of period sometimes referred to as the London, where they remain today. Continuing along this line Scientific Revolution. Huygens, a of work, Huygens perfected his skills in lens grinding and highly gifted theoretical and experi- subsequently invented the achromatic eyepiece that bears his , subject to the Cambridge Core terms of use, available at mental scientist, is best known name and is still in widespread use today. for his work on the theories of Huygens left Holland in 1689, and ventured to London centrifugal force, the wave theory of where he became acquainted with Sir Isaac Newton and began light, and the pendulum clock. to study Newton’s theories on classical physics. Although it At an early age, Huygens began seems Huygens was duly impressed with Newton’s work, he work in advanced mathematics was still very skeptical about any theory that did not explain by attempting to disprove several theories established by gravitation by mechanical means. -

Computer-Aided Design and Kinematic Simulation of Huygens's
applied sciences Article Computer-Aided Design and Kinematic Simulation of Huygens’s Pendulum Clock Gloria Del Río-Cidoncha 1, José Ignacio Rojas-Sola 2,* and Francisco Javier González-Cabanes 3 1 Department of Engineering Graphics, University of Seville, 41092 Seville, Spain; [email protected] 2 Department of Engineering Graphics, Design, and Projects, University of Jaen, 23071 Jaen, Spain 3 University of Seville, 41092 Seville, Spain; [email protected] * Correspondence: [email protected]; Tel.: +34-953-212452 Received: 25 November 2019; Accepted: 9 January 2020; Published: 10 January 2020 Abstract: This article presents both the three-dimensional modelling of the isochronous pendulum clock and the simulation of its movement, as designed by the Dutch physicist, mathematician, and astronomer Christiaan Huygens, and published in 1673. This invention was chosen for this research not only due to the major technological advance that it represented as the first reliable meter of time, but also for its historical interest, since this timepiece embodied the theory of pendular movement enunciated by Huygens, which remains in force today. This 3D modelling is based on the information provided in the only plan of assembly found as an illustration in the book Horologium Oscillatorium, whereby each of its pieces has been sized and modelled, its final assembly has been carried out, and its operation has been correctly verified by means of CATIA V5 software. Likewise, the kinematic simulation of the pendulum has been carried out, following the approximation of the string by a simple chain of seven links as a composite pendulum. The results have demonstrated the exactitude of the clock. -

A Royal 'Haagseklok'
THE SPLIT (Going and Strike) BARREL (top) p.16 Overview Pendulum Applications. The Going-wheel The Strike-wheel Ratchet-work Stop-work German Origins Hidden Stop Work English Variants WIND-ME MECHANISM? p.19 An "Up-Down" Indicator (Hypothetical Project) OOSTERWIJCK'S UNIQUE BOX CASE p.20 Overview Show Wood Carcass Construction Damage Control Mortised Hinges A Royal 'Haagse Klok' Reviewed by Keith Piggott FIRST ASSESSMENTS p.22 APPENDIX ONE - Technical, Dimensions, Tables with Comparable Coster Trains - (Dr Plomp's 'Chronology' D3 and D8) 25/7/1 0 Contents (Horological Foundation) APPENDIX TWO - Conservation of Unique Case General Conservation Issues - Oosterwijck‟s Kingwood and Ebony Box INTRODUCTION First Impressions. APPENDIX SIX - RH Provenance, Sir John Shaw Bt. Genealogy HUYGENS AUTHORITIES p.1 Collections and Exhibitions Didactic Scholarship PART II. „OSCILLATORIUM‟ p.24 Who was Severijn Oosterwijck? Perspectives, Hypotheses, Open Research GENERAL OBSERVATIONS p.2 The Inspection Author's Foreword - Catalyst and Conundrums Originality 1. Coster‟s Other Contracts? p.24 Unique Features 2. Coster‟s Clockmakers? p.24 Plomp‟s Characteristic Properties 3. Fromanteel Connections? p.25 Comparables 4. „Secreet‟ Constructions? p.25 Unknown Originator : German Antecedents : Application to Galilei's Pendulum : Foreknowledge of Burgi : The Secret Outed? : Derivatives : Whose Secret? PART I. „HOROLOGIUM‟ p.3 5. Personal Associations? p.29 6. The Seconds‟ Hiatus? p.29 The Clock Treffler's Copy : Later Seconds‟ Clocks : Oosterwijck‟s Options. 7. Claims to Priority? p.33 THE VELVET DIALPLATE p.3 8. Valuation? p.34 Overview Signature Plate APPENDIX THREE - Open Research Projects, Significant Makers Chapter Ring User-Access Data Comparable Pendulum Trains, Dimensions. -

THE LONDON GAZETTE, JANUARY 28, 1870. 547 Tiie Date of Such Patents, Pursuant to the Act of York, United States of America.—Dated 19Th the 16Th Viet., C
THE LONDON GAZETTE, JANUARY 28, 1870. 547 tiie date of such Patents, pursuant to the Act of York, United States of America.—Dated 19th the 16th Viet., c. 5, sec. 2, for the week ending January, 1867. the 22nd day of January. 1870. 143. William Bull, of Qualit3"-court, Chancery- 115. John Davies, of No. 24, Ludgate-hill, in the lane, in the county of Middlesex, Civil Engineer, city of London, and Arthur Helwig, of No. 73, for an invention of " improvements in glass Old Kent-road, iu the county of Surrey, En- blowing, and in apparatus therefor."—Commu- gineer, for an invention of "improvements in nicated to him from abroad by Leon Bandoux, the permanent way of railways."—Dated 16th of Charleroi, in the Kingdom of Belgium.— January, lb'67. Dated 19th January, 186/1 116. William Howavlh, Dentist, and Mason Pear- 144. Thomas Willis VVilJin, of Clerkenwell-grcon, son, Overlooker, both of Bradford, in the in the county of Middlesex, for an invention of county of York, and John Pearson, of Thorn- '• improvements in the manufacture of watch ton, in the same county, Jaequard Harness cases, and in apparatus employed therein."— Maker, for an invention of " improvements in Dated 19th January, 1867. Jacquard engines." — Dated 17th January, 147. Robert Harlow, of Heaton Norris, in the 1867. county of Lancaster, Brass Founder, for an in- 119. Ernst Silvern, of Halle, in the Kingdom of vention of " improvements in. the construction Prussia, Architect, for an invention of |S an im- of wash-basins and apparutus for supplying hot proved mode of and apparatus for purifying the and cold water to the same, which improvements impure, waters emanating from sugar-factories are also applicable to apparatus for supplying and oilier industrial establishments applicable water to baths and other similar receptacles."— also to the purification of sewage water."— Dated 21st January, 1867. -

Celestial, Flow, and Mechanical Clocks
recalibration Michael A. Lombardi First in a Series on the Evolution of Time Measurement: Celestial, Flow, and Mechanical Clocks ime is elusive. We are comfortable with the concept of us are many centuries older than the first clocks. The first -in time, but in many ways it defies understanding. We struments that we now recognize as clocks could measure T cannot see, hear, or touch time; we can only observe intervals shorter than one day by dividing the day into smaller its effects. Although we are unable to grasp time with our tra- parts. ditional senses, we can clearly “feel” the passage of time as we Most historians credit the Egyptians with being the first civ- watch night turn to day, the seasons change, or a child grow up. ilization to use clocks. Their first clocks were probably nothing We are also aware that we can’t stop or reverse the continuous more than sticks placed in the ground that indicated time by flow of time, a fact that becomes more obvious as we get older. both the length and direction of their shadow. As early as 1500 Defining time seems impossible, and attempts to do so by phi- BC, the Egyptians had developed a more advanced shadow losophers and scientists fall far short of their goal. clock (Fig. 1). This T-shaped instrument was placed in a sun- In spite of its elusiveness, we can measure time exception- lit area on the ground. In the morning, the crosspiece (AA) was ally well. In fact, we can measure time with more resolution set to face east and then rotated in the afternoon to face west. -
Some Multi-Pendulum Clocks
Double Pendulum Resonance Clocks John Kirk 1 Topics • Introduction • Resonance • Early Makers • Janvier’s Clocks • Breguet’s Clocks • Modern Clocks • “Reproductions” 2 Topics • Introduction • Resonance • Early Makers • Janvier’s Clocks • Breguet’s Clocks • Modern Clocks • “Reproductions” 3 Introduction • While there are three and four pendulum clocks, most multi-pendulum clocks have two pendulums – Clocks with more than two pendulums will be the subject of another presentation • Resonance clocks have two or more pendulums locked to each other in rate, which aids rate stability and can compensate for disturbances 4 Topics • Introduction • Resonance • Early Makers • Janvier’s Clocks • Breguet’s Clocks • Modern Clocks • “Reproductions” 5 Resonance (1 of 4) • Two mechanical oscillators, such as balance wheels or pendulums, can influence each to become resonant • For this to happen, – The oscillation of one must be detected mechanically by the other, such as two pendulums on a common slightly soft mounting – The two oscillators must have close to the same period of oscillation 6 Resonance (2 of 4) • When two pendulums influence each other of almost the same frequency, the two will trade energy until they swing in anti-phase • This occurs because swinging in anti-phase has the lowest system energy level – All resonant systems “relax” total system energy to the lowest level – This lowest level also requires the least energy to keep both oscillators in the system oscillating 7 Resonance (3 of 4) • The “Thursday Mystery” is well-known among repairers -

The " Eureka " Electric Clock
The " Eureka " Electric Clock by " Artificer " HEconstruction of electrically-driven clocks 95 per cent. of the electric clocks which have has always;been popular among model been built by amateurs have been either of the Tengineers, and at nearly every Model Hipp or the Synchronome types, with minor Engineer Exhibition, at least one or two speci- modifications in each case ; and while both mens of these clocks are represented. But while these embody unquestionably sound working the workmanship (and presumably, the per- principles, and if properly made, work most formance) of these clocks is often extremelv reliably and keep accurate time, there is a strong good, and some of them exhibit originality and case for going farther afield and introducing a ingenuity in the details of design, there is com- little more variety in this branch of construction. paratively little enterprise among constructors in The obvious answer which many amateur exploring the broad principles of design, and in constructors will make to this criticism is that the utilising the many possible forms of escapements two types of clocks mentioned above are the only and operating mechanisms which have been ones on which any detailed information on devised in the past. It is safe to say that about construction is available. This is-quite true ; of The “ Eureka ” clock movement viewed from the rear, showing regulator star wheel 123 THE MODEL ENGINEER FEBRUARY 3. 1949 two books on building electric clocks which the it can be compensated for climatic and other writer obtained some years ago, one described a variations just as readily as a pendulum. -

Harrison's Wooden Clock At
Harrison’s Wooden Clock at 300 A Visit to Nostell Priory Eve Makepeace o celebrate the 300th birthday of their John Harrison T wooden clock, Nostell Priory, wanted to really put it in the spotlight. They have certainly achieved that and widened its appeal to old and young alike. For many years the clock has stood in a fairly unassuming spot within the Priory where only the eagle-eyed would realise its importance. That has all changed and the clock, one of only three surviving wooden examples by Harrison, is now at the centre of a new exhibition celebrating his skill in the place where he was born. In a custom-made display, the clock is shown without its case to highlight the beautiful wooden parts, lighting drawing the eye to the delicacy of the piece, Figure 1. Alongside the clock, visitors can also watch a specially commissioned film about Harrison and view a series of displays which celebrate his work. These include a rarely seen section of the original case, complete with calculations in Harrison’s own hand, kindly loaned by The Worshipful Company of Clockmakers. In a breakaway from the long-held assumption that National Trust properties are ‘look but don’t touch’, there are the parts of a clock displayed in a way that they can be held, examined and appreciated, Figure 2. Of particular interest to me, especially in these times of questioning ‘Conservation or Preservation?’, there is a board asking for input from visitors on their thoughts regarding the care and preservation Figure 1. of the clock. -

John Harrison (1693-1776) and the Heroics of Longitude
DOI 10.6094/helden.heroes.heros./2014/02/09 Ulrike Zimmermann 119 John Harrison (1693-1776) and the Heroics of Longitude 1. A Symposium and a Rediscovery bestseller, and Dava Sobel embarked on a car eer as a wellknown and respected author of 2 When American journalist Dava Sobel attended popular science books. the Longitude Symposium of Harvard Univer Dava Sobel’s first subject already was his sity at Cambridge, Massachusetts, in November tory, albeit part of an unaccountably hidden or 1993, she did not expect anything decisive to at least underrated history. John Harrison was a come out of either the conference or her attend carpenter and selftaught clockmaker, who was ance. “500 people from seventeen countries” born in Yorkshire and spent his early life in Bar came together to hold “a conference about the rowuponHumber, North Lincolnshire. He would history of finding longitude at sea,” W. H. An prob ably have spent his life in obscur ity had he drewes, curator of the scientific instruments col not solved one of the major techno logical prob lec tion at Harvard, notes in his introduction to lems of his time, the problem of how to determine the conference proceedings (Andrewes, Intro a ship’s eastwest position, its longitude, at sea. duction 1). Despite the sizable number of par Harrison has a firm place in the his tory of navi ticipants, the Longitude Symposium was at first gation, and would have been known amongs t sight a convention of specialists sharing their horologists, clock and watch makers, and nava l knowledge and discussing finer points of their historians.