(SESORA) Forecast for Solar Surface Irradiance—Method and Validation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aerosol Effective Radiative Forcing in the Online Aerosol Coupled CAS
atmosphere Article Aerosol Effective Radiative Forcing in the Online Aerosol Coupled CAS-FGOALS-f3-L Climate Model Hao Wang 1,2,3, Tie Dai 1,2,* , Min Zhao 1,2,3, Daisuke Goto 4, Qing Bao 1, Toshihiko Takemura 5 , Teruyuki Nakajima 4 and Guangyu Shi 1,2,3 1 State Key Laboratory of Numerical Modeling for Atmospheric Sciences and Geophysical Fluid Dynamics, Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing 100029, China; [email protected] (H.W.); [email protected] (M.Z.); [email protected] (Q.B.); [email protected] (G.S.) 2 Collaborative Innovation Center on Forecast and Evaluation of Meteorological Disasters/Key Laboratory of Meteorological Disaster of Ministry of Education, Nanjing University of Information Science and Technology, Nanjing 210044, China 3 College of Earth and Planetary Sciences, University of Chinese Academy of Sciences, Beijing 100029, China 4 National Institute for Environmental Studies, Tsukuba 305-8506, Japan; [email protected] (D.G.); [email protected] (T.N.) 5 Research Institute for Applied Mechanics, Kyushu University, Fukuoka 819-0395, Japan; [email protected] * Correspondence: [email protected]; Tel.: +86-10-8299-5452 Received: 21 September 2020; Accepted: 14 October 2020; Published: 17 October 2020 Abstract: The effective radiative forcing (ERF) of anthropogenic aerosol can be more representative of the eventual climate response than other radiative forcing. We incorporate aerosol–cloud interaction into the Chinese Academy of Sciences Flexible Global Ocean–Atmosphere–Land System (CAS-FGOALS-f3-L) by coupling an existing aerosol module named the Spectral Radiation Transport Model for Aerosol Species (SPRINTARS) and quantified the ERF and its primary components (i.e., effective radiative forcing of aerosol-radiation interactions (ERFari) and aerosol-cloud interactions (ERFaci)) based on the protocol of current Coupled Model Intercomparison Project phase 6 (CMIP6). -
Marine Cloud Brightening
MARINE CLOUD BRIGHTENING Alan Gadian , John Latham, Mirek Andrejczuk, Keith Bower, Tom Choularton, Hugh Coe, Paul Connolly, Ben Parkes, Phillip Rasch, Stephen Salter, Hailong Wang and Rob Wood . Contents:- • Background to the philosophical approach • Some L.E.M . and climate model results • Technological issues. • Future plans and publications. Science Objectives:- • To explain the science of how stratocumulus clouds can have a significant effect on the earth’s radiation balance • To present some modelling results from Latham et al 2011 Marine Cloud Brightening, WRCP October 2011 1 Stratocumulus clouds cover more than 30% of ocean surface Stratocumulus clouds have a high reflectance, which depends on droplet number and mean droplet size. Twomey Effect .:- Smaller drops produce whiter clouds . Proposal :- To advertently to enhance the droplet concentration N in low-level maritime stratocumulus clouds, so increasing cloud albedo (Twomey, JAS, 1977 ) and longevity ( Albrecht, Science, 1989 ) Technique:- To disseminate sea-water droplets of diameter about 1um at the ocean surface. Some of these ascend via turbulence to cloud-base where they are activated to form cloud droplets, thereby enhancing cloud droplet number concentration, N (Latham, Nature 1990 ; Phil Trans Roy Soc 2008 and 2011, under review ) 2 Above:- Computed spherical albedo for increasing pollution in THIN, MEDIUM and THICK clouds. ( Twomey, JAS, 1977 ) Right:- Frequency distributions of the reflectances at 1,535 nm versus reflectances at 754 nm. From ACE-2. Isolines of geometrical thickness (H) and droplet number concentration (N): higher reflectance in polluted cloud, normalised by a similar geometrical thickness (Brenguier et al. 2000 ). 3 Figure 1. Panel (a): Map of MODIS-derived annual mean cloud droplet concentration N 0 for stratiform marine warm clouds. -

Estimation of Cloud Condensation Nuclei Concentration from Aerosol Optical Quantities: Influential Factors and Uncertainties
Open Access Atmos. Chem. Phys., 14, 471–483, 2014 Atmospheric www.atmos-chem-phys.net/14/471/2014/ doi:10.5194/acp-14-471-2014 Chemistry © Author(s) 2014. CC Attribution 3.0 License. and Physics Estimation of cloud condensation nuclei concentration from aerosol optical quantities: influential factors and uncertainties Jianjun Liu1,2 and Zhanqing Li1,2 1State Laboratory of Earth Surface Process and Resource Ecology, GCESS, Beijing Normal University, Beijing, China. 2Department of Atmospheric and Oceanic Science and Earth System Science Interdisciplinary Center, University of Maryland, College Park, Maryland, USA Correspondence to: Zhanqing Li ([email protected]) Received: 26 July 2013 – Published in Atmos. Chem. Phys. Discuss.: 2 September 2013 Revised: 7 November 2013 – Accepted: 30 November 2013 – Published: 15 January 2014 Abstract. Large-scale measurements of cloud condensation significant increase in σsp and decrease in CCN with increas- nuclei (CCN) are difficult to obtain on a routine basis, ing SSA is observed, leading to a significant decrease in their whereas aerosol optical quantities are more readily available. ratio (CCN / σsp) with increasing SSA. Parameterized rela- This study investigates the relationship between CCN and tionships are developed for estimating CCN, which account aerosol optical quantities for some distinct aerosol types us- for RH, particle size, and SSA. ing extensive observational data collected at multiple Atmo- spheric Radiation Measurement (ARM) Climate Research Facility (CRF) sites around the world. The influences of rel- ative humidity (RH), aerosol hygroscopicity (fRH) and sin- 1 Introduction gle scattering albedo (SSA) on the relationship are analyzed. Better relationships are found between aerosol optical depth Aerosols play important roles in Earth’s climate and the hy- (AOD) and CCN at the Southern Great Plains (US), Ganges drological cycle via their direct and indirect effects (IPCC, Valley (India) and Black Forest sites (Germany) than those at 2007). -

Aerosols, Their Direct and Indirect Effects
5 Aerosols, their Direct and Indirect Effects Co-ordinating Lead Author J.E. Penner Lead Authors M. Andreae, H. Annegarn, L. Barrie, J. Feichter, D. Hegg, A. Jayaraman, R. Leaitch, D. Murphy, J. Nganga, G. Pitari Contributing Authors A. Ackerman, P. Adams, P. Austin, R. Boers, O. Boucher, M. Chin, C. Chuang, B. Collins, W. Cooke, P. DeMott, Y. Feng, H. Fischer, I. Fung, S. Ghan, P. Ginoux, S.-L. Gong, A. Guenther, M. Herzog, A. Higurashi, Y. Kaufman, A. Kettle, J. Kiehl, D. Koch, G. Lammel, C. Land, U. Lohmann, S. Madronich, E. Mancini, M. Mishchenko, T. Nakajima, P. Quinn, P. Rasch, D.L. Roberts, D. Savoie, S. Schwartz, J. Seinfeld, B. Soden, D. Tanré, K. Taylor, I. Tegen, X. Tie, G. Vali, R. Van Dingenen, M. van Weele, Y. Zhang Review Editors B. Nyenzi, J. Prospero Contents Executive Summary 291 5.4.1 Summary of Current Model Capabilities 313 5.4.1.1 Comparison of large-scale sulphate 5.1 Introduction 293 models (COSAM) 313 5.1.1 Advances since the Second Assessment 5.4.1.2 The IPCC model comparison Report 293 workshop: sulphate, organic carbon, 5.1.2 Aerosol Properties Relevant to Radiative black carbon, dust, and sea salt 314 Forcing 293 5.4.1.3 Comparison of modelled and observed aerosol concentrations 314 5.2 Sources and Production Mechanisms of 5.4.1.4 Comparison of modelled and satellite- Atmospheric Aerosols 295 derived aerosol optical depth 318 5.2.1 Introduction 295 5.4.2 Overall Uncertainty in Direct Forcing 5.2.2 Primary and Secondary Sources of Aerosols 296 Estimates 322 5.2.2.1 Soil dust 296 5.4.3 Modelling the Indirect -

ALBEDO ENHANCEMENT by STRATOSPHERIC SULFUR INJECTIONS: a CONTRIBUTION to RESOLVE a POLICY DILEMMA? an Editorial Essay
ALBEDO ENHANCEMENT BY STRATOSPHERIC SULFUR INJECTIONS: A CONTRIBUTION TO RESOLVE A POLICY DILEMMA? An Editorial Essay Fossil fuel burning releases about 25 Pg of CO2 per year into the atmosphere, which leads to global warming (Prentice et al., 2001). However, it also emits 55 Tg S as SO2 per year (Stern, 2005), about half of which is converted to sub-micrometer size sulfate particles, the remainder being dry deposited. Recent research has shown that the warming of earth by the increasing concentrations of CO2 and other greenhouse gases is partially countered by some backscattering to space of solar radiation by the sulfate particles, which act as cloud condensation nuclei and thereby influ- ence the micro-physical and optical properties of clouds, affecting regional precip- itation patterns, and increasing cloud albedo (e.g., Rosenfeld, 2000; Ramanathan et al., 2001; Ramaswamy et al., 2001). Anthropogenically enhanced sulfate particle concentrations thus cool the planet, offsetting an uncertain fraction of the anthro- pogenic increase in greenhouse gas warming. However, this fortunate coincidence is “bought” at a substantial price. According to the World Health Organization, the pollution particles affect health and lead to more than 500,000 premature deaths per year worldwide (Nel, 2005). Through acid precipitation and deposition, SO2 and sulfates also cause various kinds of ecological damage. This creates a dilemma for environmental policy makers, because the required emission reductions of SO2, and also anthropogenic organics (except black carbon), as dictated by health and ecological considerations, add to global warming and associated negative conse- quences, such as sea level rise, caused by the greenhouse gases. -

Oceanic Phytoplankton, Atmospheric Sulphur, Cloud Albedo and Climate Robert J
_N_A_TU_R_E~V_O_L_._32_6~16_A_P_R_I_L_1_9_87~~~~~~~~~~~1:\/IE:.\fV ~~"'fl~LJ:.~~~~~~~~~~~~~~~~~~~6_55 Oceanic phytoplankton, atmospheric sulphur, cloud albedo and climate Robert J. Charlson*, James E. Lovelockt, Meinrat 0. Andreae* & Stephen G. Warren* *Department of Atmospheric Sciences AK-40, University of Washington, Seattle, Washington 98195, USA t Coombe Mill Experimental Station. Launceston, Cornwall PL15 9RY, UK :j: Department of Oceanography, Florida State University, Tallahassee, Florida 32306, USA The major source of cloud-condensation nuclei (CCN) over the oceans appears to be dimethylsulphide, which is produced by planktonic algae in sea water and oxidizes in the atmosphere to form a sulphate aerosol. Because the reflectance (albedo) of clouds (and thus the Earth's radiation budget) is sensitive to CCN density, biological regulation of the climate is possible through the effects of temperature and sunlight on phytoplankton population and dimethylsulphide production. To counteract the warming due to doubling of atmospheric C02' an approximate doubling of CCN would be needed. CLIMATIC influences of the biota are usually thought of in a volcano is of regional importance only. Large eruptions, on connection with biological release and uptake of C02 and CH4 the other hand, which emit enough gaseous sulphur compounds and the effect of these gases on the infrared radiative properties to influence wider areas, are relatively rare events. For this 1 of the atmosphere • However, the atmospheric aerosol also discussion, we shall assume that the contribution of CCN from participates in the radiation balance, and Shaw2 has proposed volcanic sulphur to the global atmosphere is proportional to its that the aerosol produced by the atmospheric oxidation of contribution to the total sulphur flux, that is, 10-20% of the sulphur gases from the biota may also affect climate. -

Earth Energy Budget and Balance
Earth energy budget and balance 31% total reflection (23% clouds. 8% surface) Reflection is frequency dependent but will be 69% absorption( 20% clouds, 49% surface) treated as average value for visible light range. Simplified scheme of the balance between the incident, reflected, Fi transmitted, and absorbed radiation Fr Ft Box Model Fa Kirchhoff’s law Efficiency factors F F F : emissivity (=absorptivity) F F F F r a t 1 i r a t α: albedo Fi Fi Fi : opacity (=1-transmittivity) 1 Black body: =1, α=0 Albedo, Absorption, Opacity Opaque body: =0 The incident, absorbed, reflected, and transmitted flux depends sensitively on the wavelength of the radiation! Albedo The ratio of reflected to incident solar energy is called the Albedo α At present cloud and climate conditions: 31% The Albedo depends on the Surface Albedo nature and characteristics of Asphalt 4-12% the reflecting surface, a light surface has a large Albedo Forest 8-18% (maximum 1 or 100%), a dark Bare soil 17% surface has a small Albedo Green grass 25% (minimum 0 or 0%). Desert sand 40% New concrete 55% Ocean Ice 50-70% Fresh snow 80-90% Albedo of Earth αice >35% αforest 12% αforest 12% αagriculture 20% αagriculture 20% αdesert 30% αdesert 30% αdesert 30% αforest 12% αforest 12% αocean <10% αocean <10% αice >35% Tundra 20% Arctic ocean 7 % New snow 80% Melting ice 65% Melt pond 20% Clear skies versus clouds At clear skies Albedo is relatively low because of the high Albedo value of water. This translates in an overall variation of 5-10%. -

Development of a Scheme for Parameterizing the Effects of Cloud Condensation Nuclei on Stratocumulus Cloud Albedo
Posters Development of a Scheme for Parameterizing the Effects of Cloud Condensation Nuclei on Stratocumulus Cloud Albedo W. R. Cotton, B. Stevens, D. Duda, and G. L. Stephens Colorado State University Department of Atmospheric Science Fort Collins, Colorado Introduction • Drizzle formation is a complicated function of the CCN spectra, especially giant and ultra-giant aerosol, cloud The goal of this research is to develop a scheme for liquid water contents, mixing processes, and the time parameterizing the effects of varying concentrations of scales of cloud drafts which are determined by the cloud condensation nuclei (CCN) on stratocumulus cloud strengths and depths of cloud drafts. albedo for use in global climate models. The challenges in achieving this goal are Approach • CCNs are not a horizontally and vertically uniform species, but vary depending upon differential horizontal Our approach is to produce large eddy simulations (LES) advection of differing CCN sources and upon local or cloud-resolving models (CRMs) of marine stratocumulus conditions (e.g., CCN formation by gas-to-particle clouds including the use of bin-resolving aerosol and cloud conversion and cloud removal). CCNs are probably as microphysics. The model is designed to obtain an internally variable as water vapor. consistent coupling between stratocumulus cloud dynamics and cloud microphysics. • The peak supersaturations that determine the activation of CCN and resultant aerosol and cloud droplet The simulations are performed for “generically” represented (a) distributions are a function of cloud updraft and initial conditions for the First ISCCP Regional Experiment downdrafts on scales of a few hundred meters with (FIRE I) stratus case described by Betts and Boers (1990). -
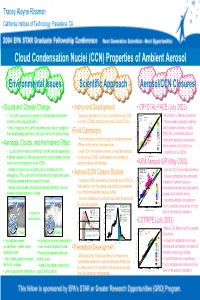
Cloud Condensation Nuclei (CCN) Properties of Ambient Aerosol
Tracey Alayne Rissman California Institute of Technology, Pasadena, CA Cloud Condensation Nuclei (CCN) Properties of Ambient Aerosol Environmental Issues Scientific Approach Aerosol/CCN Closures • Clouds and Climate Change • Instrument Development • CRYSTAL-FACE (July 2002) 4 10 9 0.85% Supersaturation 8 100% (NH ) SO 7 4 2 4 • Key West, FL: Marine Conditions • The Earth’s climate is the result of a delicate balance between • Designed and built one-column and three-column CCN log(N ) = m*log(N ) + b 6 P O µ(NP/NO) = 1.09 5 m = 1.04 σ(NP/NO) = 0.31 b = -0.08 4 ) -3 Flight 1 incoming and outgoing radiation. counters (CCNCs), based on previous Caltech CCNCs 3 • Closure was successful, probably Flight 2 ; cm P Flight 3 N 2 Flight 4 Flight 5 due to simple chemistry, mostly • Small changes in the Earth’s cloudiness can lead to changes in Flight 6 Flight 10 103 9 Flight 11 •Field Campaigns 8 Flight 12 7 (NH ) SO , of ambient particles. the overall energy balance on the globe, which can affect climate. 6 Flight 13 4 2 4 5 Flight 14 Flight 15 4 Flight 16 • Field campaigns allow the integration of data from many 3 Flight 17 • Important activation properties in Flight 18 Predicted CCN Concentration( 2 Flight 19 • Aerosols, Clouds, and the Indirect Effect Flight 20 different instruments at the same time. theory: aerosol size distribution 1:1 Line 2 Linear Fit in 10 9 8 Log-Log Space • Clouds form by water condensing on small particles suspended • Large CCN data sets are obtained during field missions 7 7 8 9 2 3 4 5 6 7 8 9 2 3 4 5 6 7 8 9 • VanReken et al. -

Solar Radiance and Albedo of Clouds from Space Lidar
SOLAR RADIANCE AND ALBEDO OF CLOUDS FROM SPACE LIDAR C. Martin. R. Platt (1) , Steven D. Miller (2) , William H. Hunt (3) (1) Colorado State University, 47 Koetong Parade, Mt Eliza, 3930, Australia, [email protected] (2) Naval Research Laboratory, 7 Grace Hopper Avenue, MS#2, Monterey, CA 93943-5502 USA, [email protected] (3) NASA Langley Research CenterMS#475, 23A Langley Boulevard, Hampton VA 23681-2199 USA [email protected] ABSTRACT This paper demonstrates that solar reflectance can also The background seen by a space lidar pointed towards be obtained from space lidar returns. The unique earth during daytime orbits consists of the reflected advantage of lidar is that cloud height and vertical solar radiance from terrestrial objects. This radiance structures can also be obtained at precisely the same appears as a constant background on each lidar time. backscatter profile. When orbiting over clouds, the radiance can give a measure of the cloud reflectance or albedo. Components from the earth’s surface are 2. THE LITE FLIGHTS minimal for highly reflecting clouds over the sea. The background radiance is measured at precisely the time The Lidar In-space Technology Experiment (LITE) that the atmospheric profile is obtained, allowing for flew on Space Shuttle Discovery for ten days from accurate analysis of the scene. In the case of bright September 9th to 19th, 1994. The experiment carried a clouds, a bi-directional cloud albedo can be calculated. three – wavelength high – power pulsed Neodymium- The background radiance also causes an increase in Yag lidar, transmitting at wavelengths of 1054, 532 noise imposed on the lidar profile, and a measurement and 355 nm. -

Retrievals of Cloud Fraction and Cloud Albedo from Surfacebased
PUBLICATIONS Journal of Geophysical Research: Atmospheres RESEARCH ARTICLE Retrievals of cloud fraction and cloud albedo 10.1002/2014JD021705 from surface-based shortwave radiation Special Section: measurements: A comparison Fast Physics in Climate Models: Parameterization, Evaluation, of 16 year measurements and Observation Yu Xie1,2, Yangang Liu1, Charles N. Long3, and Qilong Min4 Key Points: 1Brookhaven National Laboratory, Upton, New York, USA, 2National Renewable Energy Laboratory, Golden, Colorado, USA, • Techniques for cloud fraction and 3Pacific Northwest National Laboratory, Richland, Washington, USA, 4Atmospheric Sciences Research Center, State cloud albedo retrievals are compared • Retrievals using 16 years of University of New York at Albany, Albany, New York, USA ground-based shortwave radiation measurements • The comparison shows overall Abstract Ground-based radiation measurements have been widely conducted to gain information on good agreement clouds and the surface radiation budget. To examine the existing techniques of cloud property retrieval and explore the underlying reasons for uncertainties, a newly developed approach that allows for simultaneous retrievals of cloud fraction and cloud albedo from ground-based shortwave broadband Correspondence to: radiation measurements, XL2013, is used to derive cloud fraction and cloud albedo from ground-based Y. Xie, shortwave broadband radiation measurements at the Department of Energy Atmospheric Radiation [email protected] Measurement Southern Great Plains site. The new results are compared with the separate retrieval of cloud fraction and cloud albedo using Long2006 and Liu2011, respectively. The retrievals from the broadband Citation: radiation measurements are further compared with those based on shortwave spectral measurements Xie, Y., Y. Liu, C. N. Long, and Q. Min (2014), Retrievals of cloud fraction and (Min2008). -

Simultaneous Observations of Aerosol–Cloud–Albedo Interactions with Three Stacked Unmanned Aerial Vehicles
Simultaneous observations of aerosol–cloud–albedo interactions with three stacked unmanned aerial vehicles G. C. Roberts†, M. V. Ramana, C. Corrigan, D. Kim, and V. Ramanathan† Center for Atmospheric Sciences, Scripps Institution of Oceanography, 9500 Gilman Drive, La Jolla, CA 92093 Contributed by V. Ramanathan, November 1, 2007 (sent for review August 14, 2007) Aerosol impacts on climate change are still poorly understood, in part, (13, 14). Several studies have not detected the expected effect of because the few observations and methods for detecting their effects aerosols on clouds, possibly because of variations in liquid water are not well established. For the first time, the enhancement in cloud path (15–17), and employ aerosol and cloud properties in radiative albedo is directly measured on a cloud-by-cloud basis and linked to transfer models to estimate radiative forcing. increasing aerosol concentrations by using multiple autonomous The two analytical expressions given below illustrate the unmanned aerial vehicles to simultaneously observe the cloud mi- dependence of cloud optical depth, c, and cloud albedo, ␣c,on crophysics, vertical aerosol distribution, and associated solar radiative the cloud liquid water content, lwc; the effective radius, Reff; the fluxes. In the presence of long-range transport of dust and anthro- height of the cloud, h; the density of water, w; and an asymmetry pogenic pollution, the trade cumuli have higher droplet concentra- parameter, g, for scattering of radiation by clouds. tions and are on average brighter. Our observations suggest a higher sensitivity of radiative forcing by trade cumuli to increases in cloud 3 lwc h ϭ droplet concentrations than previously reported owing to a con- c [1] 2Reff w strained droplet radius such that increases in droplet concentrations also increase cloud liquid water content.