UNIX® System V Network Programming
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Mac OS 8 Update
K Service Source Mac OS 8 Update Known problems, Internet Access, and Installation Mac OS 8 Update Document Contents - 1 Document Contents • Introduction • About Mac OS 8 • About Internet Access What To Do First Additional Software Auto-Dial and Auto-Disconnect Settings TCP/IP Connection Options and Internet Access Length of Configuration Names Modem Scripts & Password Length Proxies and Other Internet Config Settings Web Browser Issues Troubleshooting • About Mac OS Runtime for Java Version 1.0.2 • About Mac OS Personal Web Sharing • Installing Mac OS 8 • Upgrading Workgroup Server 9650 & 7350 Software Mac OS 8 Update Introduction - 2 Introduction Mac OS 8 is the most significant update to the Macintosh operating system since 1984. The updated system gives users PowerPC-native multitasking, an efficient desktop with new pop-up windows and spring-loaded folders, and a fully integrated suite of Internet services. This document provides information about Mac OS 8 that supplements the information in the Mac OS installation manual. For a detailed description of Mac OS 8, useful tips for using the system, troubleshooting, late-breaking news, and links for online technical support, visit the Mac OS Info Center at http://ip.apple.com/infocenter. Or browse the Mac OS 8 topic in the Apple Technical Library at http:// tilsp1.info.apple.com. Mac OS 8 Update About Mac OS 8 - 3 About Mac OS 8 Read this section for information about known problems with the Mac OS 8 update and possible solutions. Known Problems and Compatibility Issues Apple Language Kits and Mac OS 8 Apple's Language Kits require an updater for full functionality with this version of the Mac OS. -

Transport Interfaces Programming Guide
Transport Interfaces Programming Guide Sun Microsystems, Inc. 2550 Garcia Avenue Mountain View, CA 94043-1100 U.S.A. Part No: 802-5886 August 1997 Copyright 1997 Sun Microsystems, Inc. 901 San Antonio Road, Palo Alto, California 94303-4900 U.S.A. All rights reserved. This product or document is protected by copyright and distributed under licenses restricting its use, copying, distribution, and decompilation. No part of this product or document may be reproduced in any form by any means without prior written authorization of Sun and its licensors, if any. Third-party software, including font technology, is copyrighted and licensed from Sun suppliers. Parts of the product may be derived from Berkeley BSD systems, licensed from the University of California. UNIX is a registered trademark in the U.S. and other countries, exclusively licensed through X/Open Company, Ltd. Sun, Sun Microsystems, the Sun logo, SunSoft, SunDocs, SunExpress, and Solaris are trademarks, registered trademarks, or service marks of Sun Microsystems, Inc. in the U.S. and other countries. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. in the U.S. and other countries. Products bearing SPARC trademarks are based upon an architecture developed by Sun Microsystems, Inc. The OPEN LOOK and SunTM Graphical User Interface was developed by Sun Microsystems, Inc. for its users and licensees. Sun acknowledges the pioneering efforts of Xerox in researching and developing the concept of visual or graphical user interfaces for the computer industry. Sun holds a non-exclusive license from Xerox to the Xerox Graphical User Interface, which license also covers Sun’s licensees who implement OPEN LOOK GUIs and otherwise comply with Sun’s written license agreements. -

Inter-Process Communication, Analysis, Guidelines and Its Impact on Computer Security
The 7th International Conference for Informatics and Information Technology (CIIT 2010) INTER-PROCESS COMMUNICATION, ANALYSIS, GUIDELINES AND ITS IMPACT ON COMPUTER SECURITY Zoran Spasov Ph.D. Ana Madevska Bogdanova T-Mobile Macedonia Institute of Informatics, FNSM Skopje, Macedonia Skopje, Macedonia ABSTRACT Finally the conclusion will offer a summary of the available programming techniques and implementations for the In this paper we look at the inter-process communication Windows platforms. We will note the security risks and the (IPC) also known as inter-thread or inter-application best practices to avoid them. communication from other knowledge sources. We will look and analyze the different types of IPC in the Microsoft II. INTER -PROCESS COMMUNICATION (IPC) Windows operating system, their implementation and the usefulness of this kind of approach in the terms of Inter-Process Communication (IPC) stands for many communication between processes. Only local techniques for the exchange of data among threads in one or implementation of the IPC will be addressed in this paper. more processes - one-directional or two-directional. Processes Special emphasis will be given to the system mechanisms that may be running locally or on many different computers are involved with the creation, management, and use of connected by a network. We can divide the IPC techniques named pipes and sockets. into groups of methods, grouped by their way of This paper will discuss some of the IPC options and communication: message passing, synchronization, shared techniques that are available to Microsoft Windows memory and remote procedure calls (RPC). We should programmers. We will make a comparison between Microsoft carefully choose the IPC method depending on data load that remoting and Microsoft message queues (pros and cons). -
SYSTEM V RELEASE 4 Migration Guide
- ATlaT UN/~ SYSTEM V RELEASE 4 Migration Guide UNIX Software Operation Copyright 1990,1989,1988,1987,1986,1985,1984,1983 AT&T All Rights Reserved Printed In USA Published by Prentice-Hall, Inc. A Division of Simon & Schuster Englewood Cliffs, New Jersey 07632 No part of this publication may be reproduced or transmitted in any form or by any means-graphic, electronic, electrical, mechanical, or chemical, including photocopying, recording in any medium, tap ing, by any computer or information storage and retrieval systems, etc., without prior permissions in writing from AT&T. IMPORTANT NOTE TO USERS While every effort has been made to ensure the accuracy of all information in this document, AT&T assumes no liability to any party for any loss or damage caused by errors or omissions or by state ments of any kind in this document, its updates, supplements, or special editions, whether such er rors are omissions or statements resulting from negligence, accident, or any other cause. AT&T furth er assumes no liability arising out of the application or use of any product or system described herein; nor any liability for incidental or consequential damages arising from the use of this docu ment. AT&T disclaims all warranties regarding the information contained herein, whether expressed, implied or statutory, including implied warranties of merchantability or fitness for a particular purpose. AT&T makes no representation that the interconnection of products in the manner described herein will not infringe on existing or future patent rights, nor do the descriptions contained herein imply the granting or license to make, use or sell equipment constructed in accordance with this description. -

Chapter 1. Origins of Mac OS X
1 Chapter 1. Origins of Mac OS X "Most ideas come from previous ideas." Alan Curtis Kay The Mac OS X operating system represents a rather successful coming together of paradigms, ideologies, and technologies that have often resisted each other in the past. A good example is the cordial relationship that exists between the command-line and graphical interfaces in Mac OS X. The system is a result of the trials and tribulations of Apple and NeXT, as well as their user and developer communities. Mac OS X exemplifies how a capable system can result from the direct or indirect efforts of corporations, academic and research communities, the Open Source and Free Software movements, and, of course, individuals. Apple has been around since 1976, and many accounts of its history have been told. If the story of Apple as a company is fascinating, so is the technical history of Apple's operating systems. In this chapter,[1] we will trace the history of Mac OS X, discussing several technologies whose confluence eventually led to the modern-day Apple operating system. [1] This book's accompanying web site (www.osxbook.com) provides a more detailed technical history of all of Apple's operating systems. 1 2 2 1 1.1. Apple's Quest for the[2] Operating System [2] Whereas the word "the" is used here to designate prominence and desirability, it is an interesting coincidence that "THE" was the name of a multiprogramming system described by Edsger W. Dijkstra in a 1968 paper. It was March 1988. The Macintosh had been around for four years. -

Marjn Norling November 2012
Mar$n Norling November 2012 UNIX Lecture Goals • Goal 1: Know basic UNIX commands and their use from memory. • Goal 2: Know how to find informaon on more advanced UNIX commands and their use. • Goal 3: Understand the basics of regular expression paerns. • Goal 4: Know the basic loops and condi$onals for shell scrip$ng and understand how to use them. UNIX Schedule Thursday Friday 09.00-09.45 UNIX introduc$on 09.00-09.45 Bash Scrip$ng 10.00-10.45 UNIX basics 10.00-10.45 Tutorial: Bash scrip$ng 11.00-12.00 Redirects to regexp 11.00-12.00 Tips & Quesons 12.00-13.00 Lunch 12.00-13.00 Lunch 13.00-16.00 Tutorial: Basics 13.00-16.00 Tutorial: finishing up UNIX HISTORY UNIX History • 1969 – First Version of UNIX developed at Bell Labs by AT&T • 1975 – UNIX 6, the first to be widely available outside Bell Labs. The first “Berkeley So]ware Distribu$on” (BSD) is released. • 1989 – UNIX System V, the last tradi$onal UNIX version. • 1991 – Linus Torvalds begin developing Linux. “UNIX-like” • Today – UNIX itself, what’s now called “tradi$onal UNIX” is not used, except by enthusiasts. • There are many “UNIX-like” systems (also known as *nix or UN*X) that are similar to UNIX while not conforming to the Single UNIX Specificaon. • In fact, most operang systems today except windows are “UNIX like”. Single UNIX Specificaon (SUS) • Developed and maintained by the Aus$n Group, based on earlier work by the IEee and The Open Group. -
CS 5600 Computer Systems
CS 5600 Computer Systems Lecture 4: Programs, Processes, and Threads • Programs • Processes • Context Switching • Protected Mode Execution • Inter-process Communication • Threads 2 Running Dynamic Code • One basic function of an OS is to execute and manage code dynamically, e.g.: – A command issued at a command line terminal – An icon double clicked from the desktop – Jobs/tasks run as part of a batch system (MapReduce) • A process is the basic unit of a program in execution 3 Programs and Processes Process The running instantiation of a program, stored in RAM Program An executable file in long-term One-to-many storage relationship between program and processes 4 How to Run a Program? • When you double-click on an .exe, how does the OS turn the file on disk into a process? • What information must the .exe file contain in order to run as a program? 5 Program Formats • Programs obey specific file formats – CP/M and DOS: COM executables (*.com) – DOS: MZ executables (*.exe) • Named after Mark Zbikowski, a DOS developer – Windows Portable Executable (PE, PE32+) (*.exe) • Modified version of Unix COFF executable format • PE files start with an MZ header. – Mac OSX: Mach object file format (Mach-O) – Unix/Linux: Executable and Linkable Format (ELF) • designed to be flexible and extensible • all you need to know to load and start execution regardless of architecture 6 ABI - Application Binary Interface • interface between 2 programs at the binary (machine code) level – informally, similar to API but on bits and bytes • Calling conventions – -

Mac OS X: an Introduction for Support Providers
Mac OS X: An Introduction for Support Providers Course Information Purpose of Course Mac OS X is the next-generation Macintosh operating system, utilizing a highly robust UNIX core with a brand new simplified user experience. It is the first successful attempt to provide a fully-functional graphical user experience in such an implementation without requiring the user to know or understand UNIX. This course is designed to provide a theoretical foundation for support providers seeking to provide user support for Mac OS X. It assumes the student has performed this role for Mac OS 9, and seeks to ground the student in Mac OS X using Mac OS 9 terms and concepts. Author: Robert Dorsett, manager, AppleCare Product Training & Readiness. Module Length: 2 hours Audience: Phone support, Apple Solutions Experts, Service Providers. Prerequisites: Experience supporting Mac OS 9 Course map: Operating Systems 101 Mac OS 9 and Cooperative Multitasking Mac OS X: Pre-emptive Multitasking and Protected Memory. Mac OS X: Symmetric Multiprocessing Components of Mac OS X The Layered Approach Darwin Core Services Graphics Services Application Environments Aqua Useful Mac OS X Jargon Bundles Frameworks Umbrella Frameworks Mac OS X Installation Initialization Options Installation Options Version 1.0 Copyright © 2001 by Apple Computer, Inc. All Rights Reserved. 1 Startup Keys Mac OS X Setup Assistant Mac OS 9 and Classic Standard Directory Names Quick Answers: Where do my __________ go? More Directory Names A Word on Paths Security UNIX and security Multiple user implementation Root Old Stuff in New Terms INITs in Mac OS X Fonts FKEYs Printing from Mac OS X Disk First Aid and Drive Setup Startup Items Mac OS 9 Control Panels and Functionality mapped to Mac OS X New Stuff to Check Out Review Questions Review Answers Further Reading Change history: 3/19/01: Removed comment about UFS volumes not being selectable by Startup Disk. -
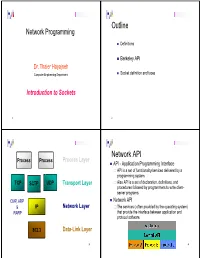
Outline Network Programming
Outline Network Programming Definitions Berkeley API Dr. Thaier Hayajneh Computer Engineering Department Socket definition and types Introduction to Sockets 1 2 Network API Process Process Process Layer API - Application Programming Interface API is a set of functionality/services delivered by a programming system. TCP SCTP UDP Transppyort Layer Also API is a set of declaration, definitions, and procedflldbdures followed by programmers titlitto write client- server programs. ICMP, ARP Network API & IP Network Layer The services ( often provided by the operating system) RARP that provide the interface between application and protocol software . 802.3 Data-Link Layer 3 4 Network API Network API wish list Generic Programming Interface. Internet Support multiple communication protocol suites OSI model Application protocol suite details (families). Application User Address (endpoint) representation independence. processor Presentation Application Provide special services for Client and Server Session Transport TCP UDP Support for message oriented and connection Network IPv4, IPv6 oriented communication. kernel Data link Data link Work with existing I/O services Physical Physical Communications Operating System independence details Presentation layer services 5 6 TCP/IP Client-Server Model TCP/IP does not include an API definition. Client 1 Server Client 2 There are a variety of APIs for use with TCP/IP: Client 3 Sockets by Berkeley XTI (X/Open Transport Interface) by AT&T One side of communication is client, and the other side is server Winsock - Windows Sockets API by Microsoft Server waits for a client request to arrive MacTCP / Open Transport by Apple Server processes the client request and sends the response back to the client Iterative or concurrent 7 8 Functions needed: Berkeley Sockets Sppyecify local and remote communication A socket is an abstract representation of a communication endpoint. -

Half-Process: a Process Partially Sharing Its Address Space with Other Processes
Electronic Preprint for Journal of Information Processing Vol.20 No.1 Regular Paper Half-process: A Process Partially Sharing Its Address Space with Other Processes Kentaro Hara1,a) Kenjiro Taura1 Received: March 31, 2011, Accepted: September 12, 2011 Abstract: Threads share a single address space with each other. On the other hand, a process has its own address space. Since whether to share or not to share the address space depends on each data structure in the whole program, the choice of “a thread or a process” for the whole program is too much “all-or-nothing.” With this motivation, this paper proposes a half-process, a process partially sharing its address space with other processes. This paper describes the design and the kernel-level implementation of the half-process and discusses the potential applicability of the half-process for multi-thread programming with thread-unsafe libraries, intra-node communications in parallel pro- gramming frameworks and transparent kernel-level thread migration. In particular, the thread migration based on the half-process is the first work that achieves transparent kernel-level thread migration by solving the problem of sharing global variables between threads. Keywords: partitioned global address space, Linux kernel, thread migration, finite element method, reconfiguration, productivity 1. Introduction Threads share a single address space with each other. When one thread issues memory operations such as mmap()/munmap()/mprotect(), all threads can see the ef- fects immediately. When one thread updates a memory address, Fig. 1 The design of a half-process. all threads can see the update immediately. In addition, all programmer can enjoy both advantages of process and thread, threads can access the same data with the same address. -

Fast Linux I/O in the Unix Tradition
— preprint only: final version will appear in OSR, July 2008 — PipesFS: Fast Linux I/O in the Unix Tradition Willem de Bruijn Herbert Bos Vrije Universiteit Amsterdam Vrije Universiteit Amsterdam and NICTA [email protected] [email protected] ABSTRACT ory wall” [26]). To improve throughput, it is now essential This paper presents PipesFS, an I/O architecture for Linux to avoid all unnecessary memory operations. Inefficient I/O 2.6 that increases I/O throughput and adds support for het- primitives exacerbate the effects of the memory wall by in- erogeneous parallel processors by (1) collapsing many I/O curring unnecessary copying and context switching, and as interfaces onto one: the Unix pipeline, (2) increasing pipe a result of these cache misses. efficiency and (3) exploiting pipeline modularity to spread computation across all available processors. Contribution. We revisit the Unix pipeline as a generic model for streaming I/O, but modify it to reduce overhead, PipesFS extends the pipeline model to kernel I/O and com- extend it to integrate kernel processing and complement it municates with applications through a Linux virtual filesys- with support for anycore execution. We link kernel and tem (VFS), where directory nodes represent operations and userspace processing through a virtual filesystem, PipesFS, pipe nodes export live kernel data. Users can thus interact that presents kernel operations as directories and live data as with kernel I/O through existing calls like mkdir, tools like pipes. This solution avoids new interfaces and so unlocks all grep, most languages and even shell scripts. -

Linux Fast-STREAMS Installation and Reference Manual Version 0.9.2 Edition 4 Updated 2008-10-31 Package Streams-0.9.2.4
Linux Fast-STREAMS Installation and Reference Manual Version 0.9.2 Edition 4 Updated 2008-10-31 Package streams-0.9.2.4 Brian Bidulock <[email protected]> for The OpenSS7 Project <http://www.openss7.org/> Copyright c 2001-2008 OpenSS7 Corporation <http://www.openss7.com/> Copyright c 1997-2000 Brian F. G. Bidulock <[email protected]> All Rights Reserved. Published by OpenSS7 Corporation 1469 Jefferys Crescent Edmonton, Alberta T6L 6T1 Canada This is texinfo edition 4 of the Linux Fast-STREAMS manual, and is consistent with streams 0.9.2. This manual was developed under the OpenSS7 Project and was funded in part by OpenSS7 Corporation. Permission is granted to make and distribute verbatim copies of this manual provided the copyright notice and this permission notice are preserved on all copies. Permission is granted to copy and distribute modified versions of this manual under the con- ditions for verbatim copying, provided that the entire resulting derived work is distributed under the terms of a permission notice identical to this one. Permission is granted to copy and distribute translations of this manual into another lan- guage, under the same conditions as for modified versions. i Short Contents Preface ::::::::::::::::::::::::::::::::::::::::::::::::: 1 Quick Start Guide :::::::::::::::::::::::::::::::::::::::: 9 1 Introduction :::::::::::::::::::::::::::::::::::::::: 15 2 Objective ::::::::::::::::::::::::::::::::::::::::::: 17 3 Reference ::::::::::::::::::::::::::::::::::::::::::: 21 4 Development ::::::::::::::::::::::::::::::::::::::::