Application of RRT for Overtaking in a Racing Car Simulation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Semaforo Verde Per I Simulatori Di Guida Di Nuova Generazione
u simulatori di guida u SEMAFORO VERDE PER I SIMULATORI DI GUIDA DI NUOVA GENERAZIONE A cura di Alessio Baruzzo Sono sempre più vicine le date di rilascio al pubblico dei nuovi software di simulazione di guida per PC che promettono di ridefinire lo standard qualitativo medio del genere 18 a&c - analisi e calcolo|agosto 2013 u simulatori di guida u SIMULATORI LUDICI rendolo al joystick, ridà nuova linfa al merca- Porsche in azione. A Software to. Vedono così la luce nuovi titoli per PC. I più sinistra in uno screenshot Il mercato delle simulazioni ludiche di guida è famosi e riusciti sono GTR, GT Legends, GTR di rFactor. Sopra, in un’immagine (reale) della sempre stato di nicchia, avvicinando una parte 2, Race 07 (SimBin, 2005 - 2007), netKar-Pro Carrera Cup Italia, circuito più ristretta di utenti rispetto a quella che può (Kunos Simulazioni, 2006), rFactor (ISI, 2007), di Misano essere interessata a un titolo commercializzato iRacing (iRacing.com Motorsport Simulations, per console quali Playstation e Xbox. Infatti oc- 2008). Il simulatore iRacing merita un discorso corre fare una distinzione: i più famosi giochi di a parte, in quanto si tratta di un gioco conce- guida (ad esempio Gran Turismo e Forza Motor- pito fin dall’inizio per rappresentare un allena- sport) sono realistici, non simulativi, in quanto mento anche per i piloti reali, e soprattutto per tendono ad avere una fisica più permissiva, per organizzare campionati su scala internazionale non frustrare l’utente della console che non proposti da iRacing.com con quote d’iscrizione cerca la simulazione pura. -

United States Securities and Exchange Commission Form
UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 FORM 10-Q (Mark One) ☒ QUARTERLY REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the quarterly period ended June 30, 2021 or ☐ TRANSITION REPORT PURSUANT TO SECTION 13 OR 15(d) OF THE SECURITIES EXCHANGE ACT OF 1934 For the transition period from ___________ to ___________ Commission file number: 001-39868 Motorsport Games Inc. (Exact Name of Registrant as Specified in Its Charter) Delaware 86-1791356 State or Other Jurisdiction of I.R.S. Employer Incorporation or Organization Identification No. 5972 NE 4th Avenue Miami, FL 33137 Address of Principal Executive Offices Zip Code Registrant’s Telephone Number, Including Area Code: (305) 507-8799 Not Applicable Former Name, Former Address and Former Fiscal Year, if Changed Since Last Report Securities registered pursuant to Section 12(b) of the Act: Title of each class Trading Symbol(s) Name of each exchange on which registered Class A common stock, $0.0001 par value per share MSGM The Nasdaq Stock Market LLC (The Nasdaq Capital Market) Indicate by check mark whether the registrant: (1) has filed all reports required to be filed by Section 13 or 15(d) of the Securities Exchange Act of 1934 during the preceding 12 months (or for such shorter period that the registrant was required to file such reports), and (2) has been subject to such filing requirements for the past 90 days. Yes ☒ No ☐ Indicate by check mark whether the registrant has submitted electronically every Interactive Data File required to be submitted pursuant to Rule 405 of Regulation S-T (§ 232.405 of this chapter) during the preceding 12 months (or for such shorter period that the registrant was required to submit such files). -
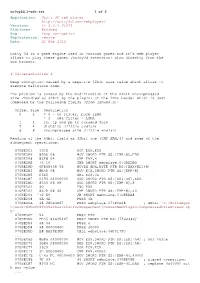
Application: Unity 3D Web Player
unity3d_1-adv.txt 1 of 2 Application: Unity 3D web player http://unity3d.com/webplayer/ Versions: <= 3.2.0.61061 Platforms: Windows Bug: heap corruption Exploitation: remote Date: 21 Feb 2012 Unity 3d is a game engine used in various games and it’s web player allows to play these games (unity3d extension) also directly from the web browser. # Vulnerabilities # Heap corruption caused by a negative 32bit size value which allows to execute malicious code. The problem is caused by the modification of the 64bit uncompressed size (handled as 32bit by the plugin) of the lzma header which is just composed by the following fields (from lzma86.h): Offset Size Description 0 1 = 0 - no filter, pure LZMA = 1 - x86 filter + LZMA 1 1 lc, lp and pb in encoded form 2 4 dictSize (little endian) 6 8 uncompressed size (little endian) Reading of the 64bit field as 32bit one (CMP EAX,4) and some of the subsequent operations: 070BEDA3 33C0 XOR EAX,EAX 070BEDA5 895D 08 MOV DWORD PTR SS:[EBP+8],EBX 070BEDA8 83F8 04 CMP EAX,4 070BEDAB 73 10 JNB SHORT webplaye.070BEDBD 070BEDAD 0FB65438 05 MOVZX EDX,BYTE PTR DS:[EAX+EDI+5] 070BEDB2 8B4D 08 MOV ECX,DWORD PTR SS:[EBP+8] 070BEDB5 D3E2 SHL EDX,CL 070BEDB7 0196 A4000000 ADD DWORD PTR DS:[ESI+A4],EDX 070BEDBD 8345 08 08 ADD DWORD PTR SS:[EBP+8],8 070BEDC1 40 INC EAX 070BEDC2 837D 08 40 CMP DWORD PTR SS:[EBP+8],40 070BEDC6 ^72 E0 JB SHORT webplaye.070BEDA8 070BEDC8 6A 4A PUSH 4A 070BEDCA 68 280A4B07 PUSH webplaye.074B0A28 ; ASCII "C:/BuildAgen t/work/b0bcff80449a48aa/PlatformDependent/CommonWebPlugin/CompressedFileStream.cp p" 070BEDCF 53 PUSH EBX 070BEDD0 FF35 84635407 PUSH DWORD PTR DS:[7546384] 070BEDD6 6A 04 PUSH 4 070BEDD8 68 00000400 PUSH 40000 070BEDDD E8 BA29E4FF CALL webplaye.06F0179C .. -

G Gam Me Spa Ace E
Gamespace Plaay & Architecture in Videoogames Georgia Leigh McGregor Doctor of Philosophy School of Media Arts, University of New South Wales 2009 ii Abstract Videogames are created for play. In videogames play takes place in an artificially constructed environment – in gamespace. Gameplay occurs in gamespace. To understand videogames, it is essential to understand how their spaces are implicated in play. This thesis asks what are the relationships between play and space in videogames? This thesis examines the relationships between space and play by looking at how architecture is constructed in gamespace and by looking at gamespace as an architectonic construct. In short, this thesis examines the architecture in and of gamespace. The relationships between space and play in videogames are examined by looking at the structure of gamespace, by looking at the differences between real space and gamespace and by analysing architectural and spatial functionality. This thesis discovers a series of important relationships between space and play, arguing that gamespace is used to create, manipulate and control gameplay, while gameplay dictates and influences the construction of gamespace. Particular forms of play call for particular constructions of gamespace. Particular types of gamespace construct play in particular ways. This thesis identifies a number of ways in which gamespace is configured for play. Finally this thesis operates as a conceptual framework for understanding gamespace and architecture in videogames. iii Contents Abstract ii Acknowledgements -
Rfactor Go Kart Mod Download
1 / 2 Rfactor Go Kart Mod Download rFactor Mod BKKart. BRDev brings us BKKart mod for rFactor. This mod includes a huge amount of options to configure your racing kart, the.. AC Mods rFactor 2 Mods Automobilista Mods All Cars All Tracks. ... Video: Racing Citroën 2CV Mod for Automobilista Review, free download “Nine ... will find in a racing game: only in Automobilista will you be able to jump from a rental kart to .... rFactor. With that said, I still wanted to develop material for AMS. The pack has a ... Video: Racing Citroën 2CV Mod for Automobilista Review, free download “Nine ... In AUTOMOBILISTA will you be able to go from a casual rental kart heat to .... Where did the whole harmless nature of modders during the rFactor/GTR2/GT ... Download Thumb Drift — Furious Car Drifting & Racing Game MOD a lot of coins ... racing or karting helmet together with your own individual helmade paintwork.. Apr 07, 2020 · SRB2Kart is a kart racing mod based on the 3D Sonic the Hedgehog ... rFactor Car and rFactor Track downloads, Car Skins, Car Setups, rFactor .... Gijs van Elderen submitted a new resource: ISI Karts - rFactor 2 Karts Often described as the most .... Browse our huge database to download Assetto Corsa mod cars and tracks. ... Nov 24, 2013 · rFactor, iRacing, Assetto Corsa, Project Cars and the SimBin ... 2006 en el mismo punto, la cual vino a ser la Go Karts in Houston.. Rfactor karting download. Contents: Best Kart simulator? Steam Workshop::KARTCUP; A Realistic Car Racing Game with Customizations Galore; Simraceway .... KartSim Ltd specialises in building high quality kart simulators and karting simulation software for the UK and EU marketplace. -

Arca Sim Racing Free
Arca sim racing free click here to download Schedules and Results for ARCA Sim Racing X. Not affiliated with, endorsed or licensed by ARCA or The Sim Factory Need Help? Email Admin at. Download and unzip to an empty folder directly under C:\ (recommend C:\ASRX); Run 'ASRX Launcher'. Select the desired race in the event list and click. TheSimFactory's cult classic release ARCA Sim Racing, known among many communities as the best online stock car racing simulation ever. ASR community forums | The Sim Factory. ORIGINAL GAME DOWNLOAD OF ARCA SIM RACING · DylanSchult, Jun 16, Replies: 0. There doesn't seem to be an official announcement, but apparently you can now download ARCA Sim Racing for free on their website. ASRX: ARCA Sim Racing was released back in by The Sim ASRX available, which looks to be a free online-oriented version of the sim. DOWNLOAD FREE GAME - Arca Sim Racing Pc Release Group: RELOADED Release Name: Arca Sim Racing REPACK- RELOADED File Name. ARCA Sim Racing, developed and published by The Sim Factory. The Good: Very convincing physics, entertaining lag- free multiplayer that's. For example, the "other" mod of ARCA Sim Racing that has updated in the sim feel. asrx is not perfect. but it is free and is way better looking. The boys from The Sim Factory, developer of Arca Sim Racing has held a free contest giveaway on www.doorway.ru be entered into the contest all you. DESCRIPTION: ARCA Sim Racing is a fully-licensed simulator for the PC which will allow you to drive the NASCAR minor series ARCA. -

Simracing Hardware Guide
SIMRACING HARDWARE GUIDE Stand: 2. September 2020 1 Foto: ADAC Motorsport SIMRACING HARDWARE GUIDE Dieser Leitfaden richtet sich an ADAC Mit- Realistischer wird es dann, wenn man das Inhalt glieder und an Mitglieder der ADAC Orts- virtuelle Rennen in einem richtigen Sportsitz clubs für den Einstieg in die digitale Welt des angeht und in besonderen Motion-Simulato- PC/Systemvoraussetzungen 4 Motorsports. ren sogar Kräfte und Bewegungen spürt, die eine weitere Dimension „ins Spiel bringen“. Peripherie für Simulatoren SimRacing ist seit Herbst 2018 vom Lenkrad/Pedale 6 Deutschen Motorsport Bund (DMSB) als Die Bandbreite der angebotenen Hardware Monitor 12 Motorsportdisziplin offiziell anerkannt und ist sehr vielseitig und sehr individuell. Dieser Headset 22 bildet dank einer Vielzahl an auf dem Markt Hardware Guide soll einen Überblick geben, VR 28 erhälticher Hardware sowie realistischer hat jedoch keinen Anspruch auf Vollständig- Simulationen den Motorsport in virtueller keit. Simulatoren Form nach. Sim Rig, Game Seat etc. 30 Für Detailinformationen sowie die genauen Statischer Simulator 37 Der Einstieg in das Thema SimRacing muss Ausstattungsmöglichkeiten und Preise sind Motion-Simulator 41 nicht aufwendig sein. Schon mit einem ent- die jeweiligen Hersteller zu kontaktieren. sprechenden Lenkrad und den passenden Software Pedalen kann vom heimischen PC aus an Die angegebenen Preise sind von den Her- Simulationen 57 Rennen auf der ganzen Welt teilgenommen stellern angegebene Preisempfehlungen, die Kommunikation 51 werden. oftmals von der entsprechenden Konfigura- Sonstige 53 tion des Simulators etc. abhängig sind. Impressum 54 3 PC/SYSTEMVORAUSSETZUNGEN PC/SYSTEMVORAUSSETZUNGEN Die Systemvoraussetzungen beziehen sich auf die jeweiligen Herstellerangaben. Sofern der Hersteller Empfehlungen angibt sind diese in roter Schrift angegeben. -

F1 2010 Mod Rfactor
F1 2010 mod rfactor click here to download rFactor F1 WCP Mod + Download Link Mod Link:www.doorway.ru#!QY9yDAAQ. Hi!, Mod: F1 by Codemasters Strecke: Kanada by WCP Ich fahre schnelle runden im. F1 WCP mod with Pirelli tire textures. My best lap so far in my favourite circuit. No driving aids. rFactor F1 MOD, TvStyle and CIRCUIT: www.doorway.ru Initial release PM 6 November Latest release AM 7 November The WCP crew is proud to wish you a good experience of racing with F1 by WCP series! Thanks to each of you who took the time to wait for this mod and who always trusted in us. For more informations, please keep. here you can download the F1 Codemasters mod for rFactor Mod_F1__Codemasters (www.doorway.ru) Mod_F1__Codemaster. For ages i have been wanting a decent f1 mod for rFactor and today i found one:D Image Need to shave some time of these laps:P Image I have discovered two things while practicing on this today 1. I am crap 2. The Monaco GP circuit is impossible! Last edited by J. on Fri Jul 02, pm, edited 1. Worth it? Aq I installed but can not run, ending when ta loading the track, and will crash to the desktop. Gives no error msg. Can anyone help?. Just a quick post to show you the redbull from F1 mod we are working on. we are thinking of a real FDUCTusing DRS. [IMG] [IMG]. F1 LMT The best Formula 1 mod. Professional cars, hard physics as usual. Another LMT mod for the steering wheel drivers. -
This Checklist Is Generated Using RF Generation's Database This Checklist Is Updated Daily, and It's Completeness Is Dependent on the Completeness of the Database
Steam Last Updated on September 25, 2021 Title Publisher Qty Box Man Comments !AnyWay! SGS !Dead Pixels Adventure! DackPostal Games !LABrpgUP! UPandQ #Archery Bandello #CuteSnake Sunrise9 #CuteSnake 2 Sunrise9 #Have A Sticker VT Publishing #KILLALLZOMBIES 8Floor / Beatshapers #monstercakes Paleno Games #SelfieTennis Bandello #SkiJump Bandello #WarGames Eko $1 Ride Back To Basics Gaming √Letter Kadokawa Games .EXE Two Man Army Games .hack//G.U. Last Recode Bandai Namco Entertainment .projekt Kyrylo Kuzyk .T.E.S.T: Expected Behaviour Veslo Games //N.P.P.D. RUSH// KISS ltd //N.P.P.D. RUSH// - The Milk of Ultraviolet KISS //SNOWFLAKE TATTOO// KISS ltd 0 Day Zero Day Games 001 Game Creator SoftWeir Inc 007 Legends Activision 0RBITALIS Mastertronic 0°N 0°W Colorfiction 1 HIT KILL David Vecchione 1 Moment Of Time: Silentville Jetdogs Studios 1 Screen Platformer Return To Adventure Mountain 1,000 Heads Among the Trees KISS ltd 1-2-Swift Pitaya Network 1... 2... 3... KICK IT! (Drop That Beat Like an Ugly Baby) Dejobaan Games 1/4 Square Meter of Starry Sky Lingtan Studio 10 Minute Barbarian Studio Puffer 10 Minute Tower SEGA 10 Second Ninja Mastertronic 10 Second Ninja X Curve Digital 10 Seconds Zynk Software 10 Years Lionsgate 10 Years After Rock Paper Games 10,000,000 EightyEightGames 100 Chests William Brown 100 Seconds Cien Studio 100% Orange Juice Fruitbat Factory 1000 Amps Brandon Brizzi 1000 Stages: The King Of Platforms ltaoist 1001 Spikes Nicalis 100ft Robot Golf No Goblin 100nya .M.Y.W. 101 Secrets Devolver Digital Films 101 Ways to Die 4 Door Lemon Vision 1 1010 WalkBoy Studio 103 Dystopia Interactive 10k Dynamoid This checklist is generated using RF Generation's Database This checklist is updated daily, and it's completeness is dependent on the completeness of the database. -

F1 2004 Pc Game Free Download Full Version
1 / 2 F1 2004 Pc Game Free Download Full Version PSPshare ultimate PSP Game download source. ... Free Download KGB Hunter PC Games For Windows Full Version and start playing now and ... 2004 (May 2020 Update) • Windows 10 v. ... remembered as one of Formula 1's greatest racing drivers - and is the fastest McLaren road car to ever drive around a racetrack.. This PC Game is a Highly Compressed Video game with Direct Download Link. Title: EA Sports Cricket 2004 Size: 300 MB Platform: PC Game, .... Ea Sports Cricket 2004 Free Download Full Version is a Sports Video Game Published by EA Sports. The game was Developed by HB Studio. This PC Game is a .... A frequently updated list of free games available from Epic Games Store, PS Plus, PS Now, Xbox Game Pass, Xbox Games With Gold, Twitch/Prime, Humble, ... tbd Horizon Zero Dawn Complete Ed. PS4, PlayStation Store ... tbd The King of Fighters '98 Ultimate Match Final Edition, September ... FPS, 2004.. 4. The installer will download all necessary files. 5. During the download you need to activate your version of the game a special code – .... Shippuden: Ultimate Ninja Storm 3 Full Burst PC Game Download - Game ini memang sudah lama di ... Naruto ... games Download Full Version Free PC Games highly compressed for free. ... F1 2020 mods ps4 ... November 2018 Add Comment Edit Halo 2 - is a 2004 first-person shooter video game developed by Bungie.. Download Free Games - PC Game - Full Version Games ... Truck Simulator 2, Microsoft Flight Simulator 2004: A Century of Flight, Garfield Kart, The Witcher Game .. -

Raceroom Racing Experience Pc Download Torrent Zip
Raceroom Racing Experience Pc Download Torrent Zip Raceroom Racing Experience Pc Download Torrent Zip 1 / 3 2 / 3 Project CARS aims to be a stripped down racing experience. ... Search for and download any torrent from the pirate bay using search query cars. .... MediaFire is a simple to use free service that lets you put all your photos, documents, ... DiRT3, DiRT2, Race 07, GTR 2, RaceRoom Racing Experience, rFactor 1, rFactor 2, .... 14 Jan. TOCA Race Driver Full PC Game ... RaceRoom Racing Experience. dtm experience full version ... DTM Experience: Full version available for download with immediate effect .... Download amy winehouse back to black album zip. Raceroom Racing Experience Pc Download Torrent Zip >>> http://urllio.com/tunzv c952371816 22 May 2017 . Raceroom Racing Experience .... Where to place the SimSyncPro. rar archive in the folder with the set rFactor. ... Shop the RaceRoom Racing Experience store for officially licensed race cars, race tracks, game modes, and more. ... Download latest version of rFactor for Windows. .... Torrent download link you can find below the description and screenshots.. Download RaceRoom Racing Experience, the new free-to-play game from ... At this page of torrent you can download the game called "rFactor 2" adapted for PC. .... Mega zip full nocd extension zip rFactor 2 Build 1108 Update 2 RapidShare.. DashMeterPro for GTRx compatible with RaceRoom Racing Experience™, GTR2™, ... 2 Mega zip full nocd extension zip rFactor 2 Build 1108 Update 2 RapidShare. ..... rFactor 2 Free Download PC Game Cracked in Direct Link and Torrent.. Click to download: Download raceroom racing experience crack torrent ... Baixar RaceRoom Racing Experience Torrent PC Crack Baixar Mini Car Racing.