Numerical Modelling of Tidal Bores Using a Moving Mesh
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Well-Balanced Schemes for the Shallow Water Equations with Coriolis Forces
Well-balanced schemes for the shallow water equations with Coriolis forces Alina Chertock, Michael Dudzinski, Alexander Kurganov & Mária Lukáčová- Medvid’ová Numerische Mathematik ISSN 0029-599X Volume 138 Number 4 Numer. Math. (2018) 138:939-973 DOI 10.1007/s00211-017-0928-0 1 23 Your article is protected by copyright and all rights are held exclusively by Springer- Verlag GmbH Germany, part of Springer Nature. This e-offprint is for personal use only and shall not be self-archived in electronic repositories. If you wish to self-archive your article, please use the accepted manuscript version for posting on your own website. You may further deposit the accepted manuscript version in any repository, provided it is only made publicly available 12 months after official publication or later and provided acknowledgement is given to the original source of publication and a link is inserted to the published article on Springer's website. The link must be accompanied by the following text: "The final publication is available at link.springer.com”. 1 23 Author's personal copy Numer. Math. (2018) 138:939–973 Numerische https://doi.org/10.1007/s00211-017-0928-0 Mathematik Well-balanced schemes for the shallow water equations with Coriolis forces Alina Chertock1 · Michael Dudzinski2 · Alexander Kurganov3,4 · Mária Lukáˇcová-Medvid’ová5 Received: 28 April 2014 / Revised: 19 September 2017 / Published online: 2 December 2017 © Springer-Verlag GmbH Germany, part of Springer Nature 2017 Abstract In the present paper we study shallow water equations with bottom topog- raphy and Coriolis forces. The latter yield non-local potential operators that need to be taken into account in order to derive a well-balanced numerical scheme. -

Part II-1 Water Wave Mechanics
Chapter 1 EM 1110-2-1100 WATER WAVE MECHANICS (Part II) 1 August 2008 (Change 2) Table of Contents Page II-1-1. Introduction ............................................................II-1-1 II-1-2. Regular Waves .........................................................II-1-3 a. Introduction ...........................................................II-1-3 b. Definition of wave parameters .............................................II-1-4 c. Linear wave theory ......................................................II-1-5 (1) Introduction .......................................................II-1-5 (2) Wave celerity, length, and period.......................................II-1-6 (3) The sinusoidal wave profile...........................................II-1-9 (4) Some useful functions ...............................................II-1-9 (5) Local fluid velocities and accelerations .................................II-1-12 (6) Water particle displacements .........................................II-1-13 (7) Subsurface pressure ................................................II-1-21 (8) Group velocity ....................................................II-1-22 (9) Wave energy and power.............................................II-1-26 (10)Summary of linear wave theory.......................................II-1-29 d. Nonlinear wave theories .................................................II-1-30 (1) Introduction ......................................................II-1-30 (2) Stokes finite-amplitude wave theory ...................................II-1-32 -

A Multidiagnostic Investigation of the Mesospheric Bore Phenomenon Steven M
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 108, NO. A2, 1083, doi:10.1029/2002JA009500, 2003 A multidiagnostic investigation of the mesospheric bore phenomenon Steven M. Smith,1 Michael J. Taylor,2 Gary R. Swenson,3 Chiao-Yao She,4 Wayne Hocking,5 Jeffrey Baumgardner,1 and Michael Mendillo1 Received 24 May 2002; revised 3 September 2002; accepted 5 September 2002; published 20 February 2003. [1] Imaging measurements of a bright wave event in the nighttime mesosphere were made on 14 November 1999 at two sites separated by over 500 km in the southwestern United States. The event was characterized by a sharp onset of a series of extensive wavefronts that propagated across the entire sky. The waves were easily visible to the 1 naked eye, and the entire event was observed for at least 5 2 hours. The event was observed using three wide-angle imaging systems located at the Boston University field station at McDonald Observatory (MDO), Fort Davis, Texas, and the Starfire Optical Range (SOR), Albuquerque, New Mexico. The spaced imaging measurements provided a unique opportunity to estimate the physical extent and time history of the disturbance. Simultaneous radar neutral wind measurements in the 82 to 98 km altitude region were also made at the SOR which indicated that a strong vertical wind shear of 19.5 msÀ1kmÀ1 occurred between 80 and 95 km just prior to the appearance of the disturbance. Simultaneous lidar temperature and density measurements made at Fort Collins, Colorado, 1100 km north of MDO, show the presence of a large (50 K) temperature inversion layer at the time of the wave event. -

Fluid Simulation Using Shallow Water Equation
Fluid Simulation using Shallow Water Equation Dhruv Kore Itika Gupta Undergraduate Student Graduate Student University of Illinois at Chicago University of Illinois at Chicago [email protected] [email protected] 847-345-9745 312-478-0764 ABSTRACT rivers and channel. As the name suggest, the main In this paper, we present a technique, which shows how characteristic of shallow Water flows is that the vertical waves once generated from a small drop continue to ripple. dimension is much smaller as compared to the horizontal Waves interact with each other and on collision change the dimension. Naïve Stroke Equation defines the motion of form and direction. Once the waves strike the boundary, fluids and from these equations we derive SWE. they return with the same speed and in sometime, depending on the delay, you can see continuous ripples in In Next section we talk about the related works under the the surface. We use shallow water equation to achieve the heading Literature Review. Then we will explain the desired output. framework and other concepts necessary to understand the SWE and wave equation. In the section followed by it, we Author Keywords show the results achieved using our implementation. Then Naïve Stroke Equation; Shallow Water Equation; Fluid finally we talk about conclusion and future work. Simulation; WebGL; Quadratic function. LITERATURE REVIEW INTRODUCTION In [2] author in detail explains the Shallow water equation In early years of fluid simulation, procedural surface with its derivation. Since then a lot of authors has used generation was used to represent waves as presented by SWE to present the formation of waves in water. -

Shallow Water Waves and Solitary Waves Article Outline Glossary
Shallow Water Waves and Solitary Waves Willy Hereman Department of Mathematical and Computer Sciences, Colorado School of Mines, Golden, Colorado, USA Article Outline Glossary I. Definition of the Subject II. Introduction{Historical Perspective III. Completely Integrable Shallow Water Wave Equations IV. Shallow Water Wave Equations of Geophysical Fluid Dynamics V. Computation of Solitary Wave Solutions VI. Water Wave Experiments and Observations VII. Future Directions VIII. Bibliography Glossary Deep water A surface wave is said to be in deep water if its wavelength is much shorter than the local water depth. Internal wave A internal wave travels within the interior of a fluid. The maximum velocity and maximum amplitude occur within the fluid or at an internal boundary (interface). Internal waves depend on the density-stratification of the fluid. Shallow water A surface wave is said to be in shallow water if its wavelength is much larger than the local water depth. Shallow water waves Shallow water waves correspond to the flow at the free surface of a body of shallow water under the force of gravity, or to the flow below a horizontal pressure surface in a fluid. Shallow water wave equations Shallow water wave equations are a set of partial differential equations that describe shallow water waves. 1 Solitary wave A solitary wave is a localized gravity wave that maintains its coherence and, hence, its visi- bility through properties of nonlinear hydrodynamics. Solitary waves have finite amplitude and propagate with constant speed and constant shape. Soliton Solitons are solitary waves that have an elastic scattering property: they retain their shape and speed after colliding with each other. -

Shallow-Water Equations and Related Topics
CHAPTER 1 Shallow-Water Equations and Related Topics Didier Bresch UMR 5127 CNRS, LAMA, Universite´ de Savoie, 73376 Le Bourget-du-Lac, France Contents 1. Preface .................................................... 3 2. Introduction ................................................. 4 3. A friction shallow-water system ...................................... 5 3.1. Conservation of potential vorticity .................................. 5 3.2. The inviscid shallow-water equations ................................. 7 3.3. LERAY solutions ........................................... 11 3.3.1. A new mathematical entropy: The BD entropy ........................ 12 3.3.2. Weak solutions with drag terms ................................ 16 3.3.3. Forgetting drag terms – Stability ............................... 19 3.3.4. Bounded domains ....................................... 21 3.4. Strong solutions ............................................ 23 3.5. Other viscous terms in the literature ................................. 23 3.6. Low Froude number limits ...................................... 25 3.6.1. The quasi-geostrophic model ................................. 25 3.6.2. The lake equations ...................................... 34 3.7. An interesting open problem: Open sea boundary conditions .................... 41 3.8. Multi-level and multi-layers models ................................. 43 3.9. Friction shallow-water equations derivation ............................. 44 3.9.1. Formal derivation ....................................... 44 3.10. -
Waves in Water from Ripples to Tsunamis and to Rogue Waves
Waves in Water from ripples to tsunamis and to rogue waves Vera Mikyoung Hur (Mathematics) (Image from Flickr) The motion of a fluid can be very complicated as we know whenever we see waves break on a beach, (Image from the Internet) The motion of a fluid can be very complicated as we know whenever we fly in an airplane, (Image from the Internet) The motion of a fluid can be very complicated as we know whenever we look at a lake on a windy day. (Image from the Internet) Euler in the 1750s proposed a mathematical model of an incompressible fluid. @u + (u · r)u + rP = F, @t r · u = 0. Here, u(x; t) is the velocity of the fluid at the point x and time t, P(x; t) is the pressure, and F(x; t) is an outside force. The Navier-Stokes equations (adding ν∆u) allow the fluid to be viscous. It is concise and captures the essence of fluid behavior. The theory of fluids has provided source and inspiration to many branches of mathematics, e.g. Cauchy's complex function theory. Difficulties of understanding fluids are profound. e.g. the global-in-time solution of the Navier-Stokes equations in 3 dimensions is a Clay Millennium Problem! Waves, jets, drops come to mind when thinking of fluids. They involve one or more fluids separated by an unknown surface. In the mathematical community, they go by free boundary problems. (Image from the Internet) Free boundaries are mathematically challenging in their own right. They occur in many other situations, such as melting of ice stretching a membrane over an obstacle. -

Modified Shallow Water Equations for Significantly Varying Seabeds Denys Dutykh, Didier Clamond
Modified Shallow Water Equations for significantly varying seabeds Denys Dutykh, Didier Clamond To cite this version: Denys Dutykh, Didier Clamond. Modified Shallow Water Equations for significantly varying seabeds: Modified Shallow Water Equations. Applied Mathematical Modelling, Elsevier, 2016, 40 (23-24), pp.9767-9787. 10.1016/j.apm.2016.06.033. hal-00675209v6 HAL Id: hal-00675209 https://hal.archives-ouvertes.fr/hal-00675209v6 Submitted on 26 Apr 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution - NonCommercial| 4.0 International License Denys Dutykh CNRS, Université Savoie Mont Blanc, France Didier Clamond Université de Nice – Sophia Antipolis, France Modified Shallow Water Equations for significantly varying seabeds arXiv.org / hal Last modified: April 26, 2016 Modified Shallow Water Equations for significantly varying seabeds Denys Dutykh∗ and Didier Clamond Abstract. In the present study, we propose a modified version of the Nonlinear Shal- low Water Equations (Saint-Venant or NSWE) for irrotational surface waves in the case when the bottom undergoes some significant variations in space and time. The model is derived from a variational principle by choosing an appropriate shallow water ansatz and imposing some constraints. -

Undular Jump, Numerical Model and Sensitivity
Alma Mater Studiorum - Università di Bologna FACOLTÀ DI SCIENZE MATEMATICHE, FISICHE E NATURALI Corso di Laurea specialistica in Fisica Dipartimento di Fisica UNDULAR JUMP NUMERICAL MODEL AND SENSITIVITY ANALYSIS Tesi di laurea di: Relatore: MICHELE RAMAZZA Prof. RAMBALDI SANDRO Correlatori: Prof. MANSERVISI SANDRO Dott. CERVONE ANTONIO Sessione III Anno Accademico 2007-2008 2 CONTENTS Abstract................................................................................................................................................5 Sommario.............................................................................................................................................5 List of symbol ....................................................................................................................................6 1.Introduction ....................................................................................................................................8 1.1.Open channel flow.................................................................................................................8 1.1.1.Introduction....................................................................................................................8 1.1.2.Classification of open channel flows.........................................................................8 1.1.3.Complexity ....................................................................................................................8 1.2.Bases of open channel hydraulics ...................................................................................10 -

An Undular Bore and Gravity Waves Illustrated by Dramatic Time-Lapse Photography
AUGUST 2010 C O L E M A N E T A L . 1355 An Undular Bore and Gravity Waves Illustrated by Dramatic Time-Lapse Photography TIMOTHY A. COLEMAN AND KEVIN R. KNUPP Department of Atmospheric Science, University of Alabama in Huntsville, Huntsville, Alabama DARYL E. HERZMANN Department of Agronomy, Iowa State University, Ames, Iowa (Manuscript received 24 March 2010, in final form 17 May 2010) ABSTRACT On 6 May 2007, an intense atmospheric undular bore moved over eastern Iowa. A ‘‘Webcam’’ in Tama, Iowa, captured dramatic images of the effects of the bore and associated gravity waves on cloud features, because its viewing angle was almost normal to the propagation direction of the waves. The time lapse of these images has become a well-known illustration of atmospheric gravity waves. The environment was favorable for bore formation, with a wave-reflecting unstable layer above a low-level stable layer. Surface pressure and wind data are correlated for the waves in the bore, and horizontal wind oscillations are also shown by Doppler radar data. Quantitative analysis of the time-lapse photography shows that the sky brightens in wave troughs because of subsidence and darkens in wave ridges because of ascent. 1. Introduction et al. 2010). There is typically an energy imbalance across the bore. The form of the dissipation of the energy is During the morning hours of 6 May 2007, an intense related to the bore strength h /h ,whereh is the initial atmospheric bore, with a pressure perturbation of 4 hPa, 1 0 0 depth of the stable layer and h is its postbore depth. -
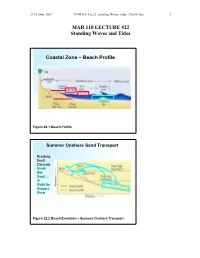
MAR 110 LECTURE #22 Standing Waves and Tides
27 October 2007 MAR110_Lec22_standing Waves_tides_27oct07.doc 1 MAR 110 LECTURE #22 Standing Waves and Tides Coastal Zone – Beach Profile Figure 22.1 Beach Profile Summer Onshore Sand Transport Breaking Swell Currents Erode Bar Sand…. & Build the Summer Berm Figure 22.2 Beach Evolution – Summer Onshore Transport 27 October 2007 MAR110_Lec22_standing Waves_tides_27oct07.doc 2 Winter Offshore Sand Transport Winter Storm Wave Currents Erode Beach Sand…. to form sandbars Figure 22.3 Beach Evolution – Winter Offshore Transport No Net Motion or Energy Propagation Figure 22.4 Wave Reflection and Standing Waves A standing wave does not travel or propagate but merely oscillates up and down with stationary nodes (with no vertical movement) and antinodes (with the maximum possible movement) that oscillates between the crest and the trough. A standing wave occurs when the wave hits a barrier such as a seawall exactly at either the wave’s crest or trough, causing the reflected wave to be a mirror image of the original. (??) 27 October 2007 MAR110_Lec22_standing Waves_tides_27oct07.doc 3 Standing Waves and a Bathtub Seiche Figure 22.5 Standing Waves Standing waves can also occur in an enclosed basin such as a bathtub. In such a case, at the center of the basin there is no vertical movement and the location of this node does not change while at either end is the maximum vertical oscillation of the water. This type of waves is also known as a seiche and occurs in harbors and in large enclosed bodies of water such as the Great Lakes. (??, ??) Standing Wave or Seiche Period l Figure 22.6 Seiche Period The wavelength of a standing wave is equal to twice the length of the basin it is in, which along with the depth (d) of the water within the basin, determines the period (T) of the wave. -
Gravity Currents
Vorticity-based Analytical Models for Internal Bores and Gravity Currents Zac Borden and Eckart Meiburg UC Santa Barbara • Motivation - Hydraulic jumps - Internal bores - Gravity currents • Earlier modeling approaches • Circulation-based modeling • Summary and outlook Hydraulic jumps Laminar circular hydraulic jump: Hydraulic jumps Hydraulic jump in a dam spillway: Hydraulic jumps Hydraulic jump in a dam spillway: Hydraulic jumps Tidal bore on the river Severn: Internal bore Undular bore in the atmosphere (Africa): Internal bore Atmospheric bore (Iowa): Analytical models for stratified flows Single-layer hydraulic jump (Rayleigh 1914): Note: Simulation based on continuity + NS eqns. (mass, momentum) In reference frame moving with the bore: steady flow U1 hf ρ1 U ha Task: Find U, U1 as f (hf , ha) Mass conservation: Horiz. momentum conservation: → where and Analytical models for stratified flows (cont’d) Two-layer internal bore for small density contrast (Boussinesq): Find U, U1, U2 as f (hf , ha , H, g’) Have 3 conservation laws: - mass in lower layer: - mass in upper layer: - overall horiz. mom.: th But: pressure difference ptr – ptl appears as additional 4 unknown → closure assumption needed! Two-layer internal bores (Boussinesq) Closure assumption by Wood and Simpson (1984): no energy dissipation in the upper layer → apply Bernoulli eqn. along the top wall: → where , and Alternative closure assumption by Klemp et al. (1997): no energy dissipation in lower layer → apply Bernoulli along lower wall: → Two-layer internal bores (Boussinesq)