Aesthetics of Adaptive Behaviors in Agent-Based Art
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Painting in a Digital World: I Told You So
AUTHOR James Faure Walker University of the Arts, Camberwell London, United Kingdom Painting in a Digital World: [email protected] I Told You So Over the past 10 years, the proportion of painters who use comput like say hello. The curator of new media will casually mention that ers in their work has been rising, and rising dramatically. They may painting is "over" as if it were a given among the digerati. Here is not all be expert users, and they probably know next to nothing a phrase from the SIGGRAPH 2005 Electronic Art and Animation about digital art or its origins, and nothing at all about its pioneer art Catalog: "... the now-weary exertions of the 20th century's picture ists. They will not have heard of SIGGRAPH. They read Frieze. They plane." Yet the pot-pourri of post-modernist styles suggests oth probably outnumber hardcore digital artists by a factor of 50 to one. erwise. That concept of progress in art, of one phase superseding So if we are to speak of the way things are going in "digital art," they another, whether tired or not - that's history. So "new media" is on a are part of the picture. somewhat anachronistic track: a one-way track. No going back! No mixing! It's all historically determined! Goodbye non-interactive art! In the 1990s, it was different. Only a handful of galleries (special- You're exhausted! Any attempt to integrate, to reconcile the disci ist digital art galleries) exhibited inkjet prints as fine art. Today it is plines of that wretched, tired-out 20 picture-plane, is doomed. -

Cyberarts 2018
Hannes Leopoldseder · Christine Schöpf · Gerfried Stocker CyberArts 2018 International Compendium Prix Ars Electronica Computer Animation · Interactive Art + · Digital Communities Visionary Pioneers of Media Art · u19–CREATE YOUR WORLD STARTS Prize’18 Grand Prize of the European Commission honoring Innovation in Technology, Industry and Society stimulated by the Arts INTERACTIVE ART + Navigating Shifting Ecologies with Empathy Minoru Hatanaka, Maša Jazbec, Karin Ohlenschläger, Lubi Thomas, Victoria Vesna Interactive Art was introduced to Prix Ars Electronica farewell and prayers of a dying person into the robot as a key category in 1990. In 2016, in response to a software; seeking life-likeness—computational self, growing diversity of artistic works and methods, the and environmental awareness; autonomous, social, “+” was added, making it Interactive Art +. and unpredictable physical movement; through to Interactivity is present everywhere and our idea of the raising of a robot as one's own child. This is just what it means to engage with technology has shifted a small sample of the artificial ‘life sparks’ in this from solely human–machine interfaces to a broader year’s category. Interacting with such artificial enti- experience that goes beyond the anthropocentric ties draws us into both a practical and ethical dia- point of view. We are learning to accept machines as logue about the future of robotics, advances in this other entities we share our lives with while our rela- field, and their role in our lives and society. tionship with the biological world is intensified by At the same time, many powerful works that deal the urgency of environmental disasters and climate with social issues were submitted. -
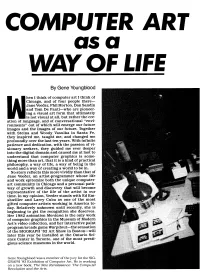
COMPUTER ART As a WAY of LIFE
COMPUTER ART as a WAY OF LIFE By Gene Youngblood hen I think of computer art I think of Chicago, and of four people there- Jane Veeder, Phil Morton, Dan Sandin and Tom De Fanti-who are pioneer- ring a visual art form that ultimately is not visual at all, but rather the cre- ation of language, and of conversational "envi- ronments" out of which will emerge our future images and the images of our future. Together Wwith Steina and Woody Vasulka in Santa Fe, they inspired me, taught me, and changed me profoundly over thelast tenyears. With infinite patience and dedication, with the passion of vi- sionary seekers, they guided me ever deeper into the digital domain and caused me at last to understand that computer graphics is some- thing more than art, that it is a kind of practical philosophy, a way of life, a way of being in the world anda way of creating a world to be in. No story reflects this more vividlythan that of Jane Veeder, an artist-programmer whose life and work epitomize both the unique computer- art community in Chicago and a personal path- way of growth and discovery that will become representative of the life of the artist in our time. In my opinion, Veeder stands with Ed Em- shwiller and Larry Cuba as one of the most gifted computer artists working in America to- day. Relatively unknown until recently, she is beginning to get the recognition she deserves. Her 1982 animation Montana is the only work of computer graphics in the Museum of Modern Art's video collection, and her interactive paint program/arcade game Warpitout-the sensation of the SIGGRAPH '82 Art Show in Boston-will later this year be installed at the Ontario Sci- ence Center in Toronto, one of the most presti- gious science museums in the world. -

Cyberarts 2021 Since Its Inception in 1987, the Prix Ars Electronica Has Been Honoring Creativity and Inno- Vativeness in the Use of Digital Media
Documentation of the Prix Ars Electronica 2021 Lavishly illustrated and containing texts by the prize-winning artists and statements by the juries that singled them out for recognition, this catalog showcases the works honored by the Prix Ars Electronica 2021. The Prix Ars Electronica is the world’s most time-honored media arts competition. Winners are awarded the coveted Golden Nica statuette. Ever CyberArts 2021 since its inception in 1987, the Prix Ars Electronica has been honoring creativity and inno- vativeness in the use of digital media. This year, experts from all over the world evaluated Prix Ars Electronica S+T+ARTS 3,158 submissions from 86 countries in four categories: Computer Animation, Artificial Intelligence & Life Art, Digital Musics & Sound Art, and the u19–create your world com - Prize ’21 petition for young people. The volume also provides insights into the achievements of the winners of the Isao Tomita Special Prize and the Ars Electronica Award for Digital Humanity. ars.electronica.art/prix STARTS Prize ’21 STARTS (= Science + Technology + Arts) is an initiative of the European Commission to foster alliances of technology and artistic practice. As part of this initiative, the STARTS Prize awards the most pioneering collaborations and results in the field of creativity 21 ’ and innovation at the intersection of science and technology with the arts. The STARTS Prize ‘21 of the European Commission was launched by Ars Electronica, BOZAR, Waag, INOVA+, T6 Ecosystems, French Tech Grande Provence, and the Frankfurt Book Fair. This Prize catalog presents the winners of the European Commission’s two Grand Prizes, which honor Innovation in Technology, Industry and Society stimulated by the Arts, and more of the STARTS Prize ‘21 highlights. -
Nailing Down Bits: Digital Art & Intellectual Property
© Richard Rinehart Published under license by the Canadian Heritage Information Network (CHIN) Printed in Canada Library and Archives Canada Cataloguing in Publication Nailing down bits [electronic resource]: Digital Art and Intellectual Property / by Richard Rinehart. Electronic monograph in PDF format. Mode of access: World Wide Web. Issued also in French under title: Bien fixer les éléments d’information. ISBN 0-662-44629-1 Cat. no.: CH56-4/4-2006E-PDF 1. Copyright—Art. 2. Digital art. 3. Intellectual property—Social aspects. 4. Copyright and electronic data processing. 5. Digital media—Social aspects. 6. Cultural property. 7. Art and society. I. Canadian Heritage Information Network II. Title. N7433.8.R56 2006 346.04’8 C2006-980312-9 Nailing Down Bits: Digital Art and Intellectual Property Page 4 7 Introduction 9 Setting the Stage 14 Variable Media 18 Source Code 21 Copyright as Subject 23 Audiences, Participants, and Co-Authors 25 Publishing, Presenting, and Exhibiting Digital Art 27 Collection and Preservation 30 Economic Models for Digital Art 34 Moral Rights 36 Responses from the Legal Community 38 Summary of Findings 40 Recommendations for the Cultural Heritage Community 44 Concluding Remarks 45 Acknowledgements 45 Author Biography and Contact 46 Interviewees 48 End Notes 52 Other Sources Page 5 Page 6 Introduction This paper on digital art and intellectual property has been commissioned and published by Canadian Heritage Information Network CHIN), a special operating agency of the Department of Canadian Heritage. This paper is part of a larger series of papers on intellectual property and cultural heritage that have been commissioned by CHIN [1]. -

From Multimedia to Software Art Installations
Collaborative and Transdisciplinary practices in Cyberart: from Multimedia to Software Art installations Diana Domingues Eliseo Reategui NTAV Lab – Universidade de Caxias do Sul/CNPQ Mestrado em Comunicação e Linguagens – Universidade Tuiuti do Paraná Brazil How to synthesize Leonardo? The efficiency of collaborative practices related to complex systems in Cyberart dissolves the old rupture and the well-known historical divergences between artists and scientists. The main point of convergence is when all disciplines investigate the same issues, all sciences become one unique science. Interactivity, immersion, autonomy and mobile connections in Cyberart require collaborative practices related to Science of Complexity and its emergent proprieties. Speculative software are written to respond for artistic projects and they place art in the three recent realms of “engineering art”, “engineering culture” and “engineering nature”1. These investigation fields respond to the high level of Cyberart’s philosophical, technical, biological, social, ethical and emotional implications of scientific discoveries. A variety of disciplines related to the use of computers and networks in genetics, engineering, biotechnology, cognitive sciences, communication, anthropology, computer science, and other areas require sometimes a scripted software when applied in art practices. Writing software is not new in art practices, it has been done since the beginning of computer art, mainly in the development of formalistic aesthetics. However, artists embrace nowadays the design of adequate software by taking algorithmic information content for searching “rules” to be included in the code. Art works in cyberspace search for forms of communication close to the expansion of life in the post-human culture. The focus is the human factor of technologies or the humanization of technologies in the cross- boundaries with creativity and changes in daily life2. -

Claudia X. Valdes
CLAUDIA X. VALDES www.claudiaxvaldes.com EDUCATION DEGREES University of California, Berkeley M.F.A., 2001 Berkeley, CA Synthesis of Digital Media with Painting Final Project: “Untitled [Once]” and “Pulse” University of California, Berkeley B.A., Dramatic Art, Dance, 1995 Berkeley, CA B.A., Studio Art, 1995 PROFESSIONAL CERTIFICATES University of New Mexico Family Mediation Certificate, Spring 2018 Albuquerque, NM School of Law University of New Mexico Basic Mediation Certificate, Spring 2017 Albuquerque, NM Office of Ombudsman ADDITIONAL EDUCATION Harvard University Making Change / Executive Education, Summer 2019 Cambridge, MA Harvard Divinity School Harvard University Harvard Summer Dance Center, 1993 Cambridge, MA ACADEMIC APPOINTMENTS University of New Mexico Expert in the Field Albuquerque, NM Department of Art 2019-present Page 1 of 20 CLAUDIA X. VALDES, vitae Associate Professor Experimental Art + Technology [EAT] Department of Art 2013 – 2018 Assistant Professor Electronic Arts Department of Art + Art History 2007 – 2013 University of New Mexico Visiting Assistant Professor of Electronic Arts Albuquerque, NM Department of Art + Art History 2006 – 2007 Vermont College of Fine Arts Artist Teacher Montpelier, VT Independent study / mentorship of a MFA student working on Dance/Performance + Film/Video Fall 2009 University of California, Santa Cruz Lecturer Santa Cruz, CA Department of Art Spring 2005 Stanford University Visiting Artist Faculty Stanford, CA Department of Art + Art History Winter 2005 Mills College Visiting Artist Faculty Oakland, CA Intermedia Arts Program Fall 2004 University of Washington Faculty Seattle, WA Simpson Center for the Humanities Summer Institute in the Arts and Humanities Summer 2004 Research Associate Center for Digital Arts and Experimental Media [DXARTS] 2003 – 2004 University of California, Berkeley Visiting Lecturer Berkeley, CA Department of Art Practice Fall 2001 Graduate Student Instructor Department of Art Practice Spring 2001 Teaching Assistant Department of Art Practice Fall 2000 Page 2 of 20 CLAUDIA X. -

Education 1990 1984 1983 Teaching / Visiting Faculty Positions / Endowed Chair and Center Leadership Teaching Visiting Critic
curriculum vitae Andrea Wollensak Professor of Art Associate Fellow, Ammerman Center for Arts & Technology Connecticut College, 270 Mohegan Avenue, New London, CT 06320 [email protected] https://www.andreawollensak.com Andrea Wollensak is an artist, designer and educator. Her work spans multi-media from traditional forms/processes and digital fabrication, to generative-interactive systems and includes collaborations with community partners, computer programmers, musicians, poets, and scientists. Themes in her work explore place-based narratives on environment and community. At Connecticut College, she is on the faculty in the Art Department, and is an Associate Fellow in the Ammerman Center for Arts and Technology where served as Director from 2014-2020. Education 1990 Yale University, New Haven, Connecticut – MFA 1984 Yale University, Summer program in Design, Brissago, Switzerland 1983 University of Michigan, Ann Arbor, Michigan – BFA Teaching / Visiting Faculty Positions / Endowed Chair and Center Leadership Teaching 2007- Professor of Art, Connecticut College 00-07 Associate Professor of Art, Connecticut College 93-99 Assistant Professor of Art, Connecticut College 90-93 Assistant Professor, Concordia University, Faculty of Fine Arts, Montréal, Quebec 87-88 Full-time Adjunct Lecturer, SUNY Purchase, Visual Arts, Purchase, New York Visiting Critic / Graduate Seminar Lecturer / Graduate Thesis Advisor 2019 Rhode Island School of Design, Department of Design, Guest Critic 2017 University of Massachusetts at Dartmouth, Design Program, -

A Companion to Digital Art WILEY BLACKWELL COMPANIONS to ART HISTORY
A Companion to Digital Art WILEY BLACKWELL COMPANIONS TO ART HISTORY These invigorating reference volumes chart the influence of key ideas, discourses, and theories on art, and the way that it is taught, thought of, and talked about throughout the English‐speaking world. Each volume brings together a team of respected international scholars to debate the state of research within traditional subfields of art history as well as in more innovative, thematic configurations. Representing the best of the scholarship governing the field and pointing toward future trends and across disciplines, the Blackwell Companions to Art History series provides a magisterial, state‐ of‐the‐art synthesis of art history. 1 A Companion to Contemporary Art since 1945 edited by Amelia Jones 2 A Companion to Medieval Art edited by Conrad Rudolph 3 A Companion to Asian Art and Architecture edited by Rebecca M. Brown and Deborah S. Hutton 4 A Companion to Renaissance and Baroque Art edited by Babette Bohn and James M. Saslow 5 A Companion to British Art: 1600 to the Present edited by Dana Arnold and David Peters Corbett 6 A Companion to Modern African Art edited by Gitti Salami and Monica Blackmun Visonà 7 A Companion to Chinese Art edited by Martin J. Powers and Katherine R. Tsiang 8 A Companion to American Art edited by John Davis, Jennifer A. Greenhill and Jason D. LaFountain 9 A Companion to Digital Art edited by Christiane Paul 10 A Companion to Public Art edited by Cher Krause Knight and Harriet F. Senie A Companion to Digital Art Edited by Christiane Paul -
Creating Continuity Between Computer Art History and Contemporary Art
CAT 2010 London Conference ~ 3rd February Bruce Wands _____________________________________________________________________ CREATING CONTINUITY BETWEEN COMPUTER ART HISTORY AND CONTEMPORARY ART Bruce Wands Chair, MFA Computer Art Director of Computer Education Director, New York Digital Salon School of Visual Arts 209 East 23 Street New York, NY 10010 USA [email protected] www.mfaca.sva.edu www.nydigitalsalon.org Computer art was started by a small group of pioneering artists who had the vision to see what digital tools and technology could bring to the creative process. The technology at the time was primitive, compared to what we have today, and these artists faced resistance from the traditional art establishment. Several organizations, such as the New York Digital Salon, were started to promote digital creativity through exhibitions, publications and websites. This paper will explore how to create continuity between computer art history and a new generation of artists that does not see making art with computers as unusual and views it as contemporary art. INTRODUCTION The origins of computer art trace back over fifty years as artists began to experiment and create artwork with new technologies. Even before computers were invented, photography, radio, film and television opened up new creative territories. Many people point to the photographs of abstract images taken of an oscilloscope screen that Ben Laposky called Oscillons as some of the first electronic art images, which foreshadowed the development of computer art. While the system he used was essentially analog, the way in which the images were created was through mathematics and electronic circuitry. Another artist working at that time was Herbert Franke, and as the author of Computer Graphics – Computer Art, originally published in 1971, and followed in 1985 by an expanded second edition, he began to document the history of computer art and the artists who were involved. -

Zula Zzulakovetska Universitty, of Qu.F
Un-;zula ZzulakoveTska )E?F~,t- of Art. History UniversitTy, of Qu.F,-enslan,.-I St Lucia. Q 4072 Austnali-a ,d7 and 'Steiria Vasulka RT 6, BOX 10 t-) S -3anto. Fe, N,Y . ~ 7 c: 0 1 D~q-r Tqoo,,T~,~, and St-~?tna, It. TVas -I great. p 1ea -=-; 1j. ri-' to 1-1 ave, th-&- opportunity to talk with both of you and To7ith C-Ten-i? Yr-,ung"r,lood, at the Electronic ,!~rts Conf erence- in Sydney . You were verT}7 encouraging to my ideas and that meant :~ to ine, ::i s I'n-i re'3-117 and sure ',y%-as also the case for otherhadAustralian artists; 'e%7riters ~v,7hc, you I much regret that I t(:, back to Queen-sland met . and hurry miss the rest. of the ~-,7eek your talks then . I learned ; great. deal from your acute analysis of video art and its asti-i.tenE?ss and it -w--is terrific tx) s~e such veq;, strong --Iind clearly directed video work . You were 1-cind enough to request a Of and cOP7 rn ,y scrip t. I'm Sendill9 that to 7( u - I t s rough, of course, vQth many half formed ideas and things I've also changed my mind about since then, especially on the issue of the ethics which perhaps I had too readily given-uF--, . AnyWay, such as it. is., here it is and thank 70U fOr your interest. The conference had sorne very odd aspects tc, it. Chief17 the siting . -

The Working of Aural Being in Electronic Music Gerry Stahl Gerry
The Working of Aural Being in Electronic Music Gerry Stahl [email protected] https://gerrystahl.net Heidegger’s exploration of how things are disclosed (his ontology or philosophy of being) provides innovative ways of understanding many phenomena, including works of art. Although Heidegger did not write about music, he discussed the working of other art forms, including painting, pottery and sculpture. To discuss the implications of Heidegger’s philosophy for understanding the nature of music, we can consider his analyses of these different art forms and adapt them to music. This chapter will extend Heidegger’s approach to art by applying it to the development of electronic music in the mid-twentieth century to elucidate both his philosophy and that intriguing movement in music. Heidegger is concerned with the way things come into being, their forms of being, or how their being is worked out. The being of something centrally involves how it presents or discloses itself in its specific form. This chapter will explore the being of works of a certain genre of music, e-music—that is, how works of electronic music are structured to disclose worlds of sound in certain ways. “E-music” is here coined to refer to a particular vision of electronic music as it developed in the 1950s and 1960s.1 E-music grew out of the serial music of Schoenberg and others, and featured composers such as Varese, Stockhausen, Boulez and Xenakis. It had broad influences on classical, jazz, fusion, acid rock, rap, new-age trance and disco-dance music. Integral to e- music’s compositional experimentation was the concomitant development of analog and digital technologies of sound production, including tape splicing, sound sampling, sequencers and synthesizers.