Computer Graphics Comunicación Visual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Motion Picture Posters, 1924-1996 (Bulk 1952-1996)
http://oac.cdlib.org/findaid/ark:/13030/kt187034n6 No online items Finding Aid for the Collection of Motion picture posters, 1924-1996 (bulk 1952-1996) Processed Arts Special Collections staff; machine-readable finding aid created by Elizabeth Graney and Julie Graham. UCLA Library Special Collections Performing Arts Special Collections Room A1713, Charles E. Young Research Library Box 951575 Los Angeles, CA 90095-1575 [email protected] URL: http://www2.library.ucla.edu/specialcollections/performingarts/index.cfm The Regents of the University of California. All rights reserved. Finding Aid for the Collection of 200 1 Motion picture posters, 1924-1996 (bulk 1952-1996) Descriptive Summary Title: Motion picture posters, Date (inclusive): 1924-1996 Date (bulk): (bulk 1952-1996) Collection number: 200 Extent: 58 map folders Abstract: Motion picture posters have been used to publicize movies almost since the beginning of the film industry. The collection consists of primarily American film posters for films produced by various studios including Columbia Pictures, 20th Century Fox, MGM, Paramount, Universal, United Artists, and Warner Brothers, among others. Language: Finding aid is written in English. Repository: University of California, Los Angeles. Library. Performing Arts Special Collections. Los Angeles, California 90095-1575 Physical location: Stored off-site at SRLF. Advance notice is required for access to the collection. Please contact the UCLA Library, Performing Arts Special Collections Reference Desk for paging information. Restrictions on Access COLLECTION STORED OFF-SITE AT SRLF: Open for research. Advance notice required for access. Contact the UCLA Library, Performing Arts Special Collections Reference Desk for paging information. Restrictions on Use and Reproduction Property rights to the physical object belong to the UCLA Library, Performing Arts Special Collections. -

The Demolished Man Free
FREE THE DEMOLISHED MAN PDF Alfred Bester | 256 pages | 08 Jul 1999 | Orion Publishing Co | 9781857988222 | English | London, United Kingdom Demolition Man (film) - Wikipedia Demolition Man is a American science fiction action film directed by Marco Brambilla in his directorial debut. Stallone is John Spartan, a risk- taking police officer, who has a reputation The Demolished Man causing destruction The Demolished Man carrying out his work. After a failed attempt to rescue hostages from evil crime lord Simon Phoenix, The Demolished Man are both sentenced to be cryogenically frozen in Phoenix is thawed for a parole hearing inbut escapes. Society has changed and all crime has seemingly been eliminated. Unable to deal with a criminal as dangerous as Phoenix, The Demolished Man authorities awaken Spartan to help capture him again. The story makes allusions to many other works including Aldous Huxley 's dystopian novel Brave New World[6] and H. Wells 's The Sleeper Awakes. The film was released in the United States on October 8, Inpsychopathic career criminal The Demolished Man Phoenix kidnaps a busload of hostages and takes refuge in an abandoned building. LAPD Sergeant John Spartan runs a thermal scan of the building; finding no trace of the hostages, he leads an The Demolished Man assault to capture Phoenix. Phoenix sets off explosives to destroy the building; the hostages' corpses are later found in the rubble, and Phoenix claims Spartan knew about them and attacked anyway. Both men are sentenced to lengthy terms in the city's new "California Cryo-Penitentiary", a prison in which The Demolished Man are cryogenically frozen and exposed to subliminal rehabilitation techniques. -

Tessellation and Rendering of Trimmed NURBS Models in Scene Graph Systems
Tessellation and rendering of trimmed NURBS models in scene graph systems Dissertation zur Erlangung des Doktorgrades (Dr. rer. nat.) der Mathematisch-Naturwissenschaftlichen Fakultat¨ der Rheinischen Friedrich-Wilhelms-Universitat¨ Bonn vorgelegt von Dipl.-Inform. Akos´ Balazs´ aus Budapest/Ungarn Munchen,¨ April 2008 Universitat¨ Bonn, Institut fur¨ Informatik II Romerstraße¨ 164, 53117 Bonn Angefertigt mit Genehmigung der Mathematisch-Naturwissenschaftlichen Fakultat¨ der Rheinischen Friedrich-Wilhelms Universitat¨ Bonn. Diese Dissertation ist auf dem Hochschulschriftenserver der ULB Bonn http://hss.ulb.uni-bonn.de/diss online elektronisch publiziert. Dekan: Prof. Dr. Armin B. Cremers 1. Referent: Prof. Dr. Reinhard Klein 2. Referent: Prof. Dr. Andreas Weber Tag der Promotion: 25.09.2008 Erscheinungsjahr: 2008 I To the memory of my father To my parents, for making all of this possible. II III Acknowledgements “Standing on the shoulders of giants” - Isaac Newton once wrote, and this sentence describes how I feel about the support many people have given me during the writing of this thesis. Acknowledging their support here is beyond doubt not enough to express my sincere appreciation for their help, yet, I hope they know what their backing has meant to me. First and foremost, I must thank my advisor Prof. Dr. Reinhard Klein, whose inspi- ration, patience and guidance made writing this thesis possible. His occasional nudges were also necessary to keep me on the right track and for this I cannot be grateful enough. I would like to thank -

Cartoon and the Cult of Reduction
Forced Perspectives: Cartoon and The Cult Of Reduction MARTINE LISA COROMPT Submitted in partial fulfillment of the requirements of the degree of Doctor of Philosophy (by creative work and dissertation) August 2016 School of Art Faculty Of The Victorian College Of The Arts The University of Melbourne 2 FIG 1 Corompt, Martine Torrent – the endless storm 2015 still from the digital animation 3 4 ABSTRACT Summary Commencing with caricature and reductive imaging techniques, this research explores parallel tendencies evident within broader culture. The thesis argues this reductive predisposition became broader and more prominent during Modernism, the digital revolution of the 1990s, and is strongly manifest within various aspects of contemporary art and culture. Theorized as the ‘Cult of Reduction’ this tendency is both a cultural condition, and a studio methodology employed to create two dimensional projected animation and digital prints. Abstract Beginning with pictorial caricature as a historical predecessor to animation, the research attempted to find in caricature a meaningful methodology to provide a framework for two-dimensional animation. Incorporating digital processes with drawing and installation, reduction was understood and examined pictorially, temporally and materially. The thesis project considered caricature as a means of exploring pictorial representation as reduction, but soon recognized reduction had more broad implications, and parallel examples were discovered in areas such as economics, ecology lifestyle ideologies, as well as Fine art and design. While pictorial reduction was most obvious within Modernism, it also was resonant in less obvious ways within the digital art revolution of the 1990’s. It has been prevalent again in contemporary art as a ‘reductivist practice’ recognized by Mike Kelley’s essay ‘Foul Perfection: Thoughts on Caricature’ (1989). -
Opengl Shading Languag 2Nd Edition (Orange Book)
OpenGL® Shading Language, Second Edition By Randi J. Rost ............................................... Publisher: Addison Wesley Professional Pub Date: January 25, 2006 Print ISBN-10: 0-321-33489-2 Print ISBN-13: 978-0-321-33489-3 Pages: 800 Table of Contents | Index "As the 'Red Book' is known to be the gold standard for OpenGL, the 'Orange Book' is considered to be the gold standard for the OpenGL Shading Language. With Randi's extensive knowledge of OpenGL and GLSL, you can be assured you will be learning from a graphics industry veteran. Within the pages of the second edition you can find topics from beginning shader development to advanced topics such as the spherical harmonic lighting model and more." David Tommeraasen, CEO/Programmer, Plasma Software "This will be the definitive guide for OpenGL shaders; no other book goes into this detail. Rost has done an excellent job at setting the stage for shader development, what the purpose is, how to do it, and how it all fits together. The book includes great examples and details, and good additional coverage of 2.0 changes!" Jeffery Galinovsky, Director of Emerging Market Platform Development, Intel Corporation "The coverage in this new edition of the book is pitched just right to help many new shader- writers get started, but with enough deep information for the 'old hands.'" Marc Olano, Assistant Professor, University of Maryland "This is a really great book on GLSLwell written and organized, very accessible, and with good real-world examples and sample code. The topics flow naturally and easily, explanatory code fragments are inserted in very logical places to illustrate concepts, and all in all, this book makes an excellent tutorial as well as a reference." John Carey, Chief Technology Officer, C.O.R.E. -

Rapid Prototyping for Virtual Environments
Old Dominion University ODU Digital Commons Electrical & Computer Engineering Theses & Dissertations Electrical & Computer Engineering Winter 2008 Rapid Prototyping for Virtual Environments Emre Baydogan Old Dominion University Follow this and additional works at: https://digitalcommons.odu.edu/ece_etds Part of the Computer Sciences Commons, and the Electrical and Computer Engineering Commons Recommended Citation Baydogan, Emre. "Rapid Prototyping for Virtual Environments" (2008). Doctor of Philosophy (PhD), Dissertation, Electrical & Computer Engineering, Old Dominion University, DOI: 10.25777/pb9g-mv96 https://digitalcommons.odu.edu/ece_etds/45 This Dissertation is brought to you for free and open access by the Electrical & Computer Engineering at ODU Digital Commons. It has been accepted for inclusion in Electrical & Computer Engineering Theses & Dissertations by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. RAPID PROTOTYPING FOR VIRTUAL ENVIRONMENTS by Emre Baydogan B.S. June 1999, Marmara University, Turkey M.S. June 2001, Marmara University, Turkey A Dissertation Submitted to the Faculty of Old Dominion University in Partial Fulfillment of the Requirement for the Degree of DOCTOR OF PHILOSOPHY ELECTRICAL AND COMPUTER ENGINEERING OLD DOMINION UNIVERSITY December 2008 Lee A. Belfore, H (Director) K. Vijayan Asari Jesmca R. Crouch ABSTRACT RAPID PROTOTYPING FOR VIRTUAL ENVIRONMENTS Emre Baydogan Old Dominion University, 2008 Director: Dr. Lee A. Belfore, II Development of Virtual Environment (VE) applications is challenging where appli cation developers are required to have expertise in the target VE technologies along with the problem domain expertise. New VE technologies impose a significant learn ing curve to even the most experienced VE developer. The proposed solution relies on synthesis to automate the migration of a VE application to a new unfamiliar VE platform/technology. -
Stallone Fights Studio's Accounting Methods
Business Valuations: Stallone Fights Studio’s Accounting Methods Accounting issues take center stage in a recent dispute involving Sylvester Stallone's production company, Rogue Marble, and Warner Bros. Entertainment. The lawsuit charges Warner Bros. with breach of contract, unfair business practices and accounting fraud in connection with the revenues from the 1993 movie Demolition Man. Stallone seeks "full accounting" of revenues from the film, plus interest and damages. The suit doesn't yet specify damages, because Rogue Marble isn't "presently aware of the exact amounts of damages resulting" from the studio's alleged wrongdoing. However, the Oscar-nominated actor, writer and director — who's famous for his roles as Rocky Balboa and John Rambo — has a bigger fight in mind: His lawsuit alleges that "motion picture studios are notoriously greedy." And he wants them to account in a timely and open manner for amounts owed to actors, writers and filmmakers that are contingent on a film's performance. Here are the details of this high-profile case, along with an explanation of how its lessons about contingent consideration extend beyond Hollywood. Case Facts In 1992, Warner Bros. entered into an artist loan-out agreement with Rogue Marble for the services of Sylvester Stallone in Demolition Man, a sci-fi action film that also starred Wesley Snipes and Sandra Bullock. The loan-out agreement granted Rogue Marble certain percentages of the film's total defined gross after the amount exceed certain levels. Specifically, the contract granted: 15% of the gross when it exceeded $125 million, 17.5% when it exceeded $200 million, and 20% when it exceeded $250 million. -

Computer Algorithms As Persuasive Agents: the Rhetoricity of Algorithmic Surveillance Within the Built Ecological Network
COMPUTER ALGORITHMS AS PERSUASIVE AGENTS: THE RHETORICITY OF ALGORITHMIC SURVEILLANCE WITHIN THE BUILT ECOLOGICAL NETWORK Estee N. Beck A Dissertation Submitted to the Graduate College of Bowling Green State University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY May 2015 Committee: Kristine Blair, Advisor Patrick Pauken, Graduate Faculty Representative Sue Carter Wood Lee Nickoson © 2015 Estee N. Beck All Rights Reserved iii ABSTRACT Kristine Blair, Advisor Each time our students and colleagues participate online, they face invisible tracking technologies that harvest metadata for web customization, targeted advertising, and even state surveillance activities. This practice may be of concern for computers and writing and digital humanities specialists, who examine the ideological forces in computer-mediated writing spaces to address power inequality, as well as the role ideology plays in shaping human consciousness. However, the materiality of technology—the non-human objects that surrounds us—is of concern to those within rhetoric and composition as well. This project shifts attention to the materiality of non-human objects, specifically computer algorithms and computer code. I argue that these technologies are powerful non-human objects that have rhetorical agency and persuasive abilities, and as a result shape the everyday practices and behaviors of writers/composers on the web as well as other non-human objects. Through rhetorical inquiry, I examine literature from rhetoric and composition, surveillance studies, media and software studies, sociology, anthropology, and philosophy. I offer a “built ecological network” theory that is the manufactured and natural rhetorical rhizomatic network full of spatial, material, social, linguistic, and dynamic energy layers that enter into reflexive and reciprocal relations to support my claim that computer algorithms have agency and persuasive abilities. -

PINBALL NVRAM GAME LIST This List Was Created to Make It Easier for Customers to Figure out What Type of NVRAM They Need for Each Machine
PINBALL NVRAM GAME LIST This list was created to make it easier for customers to figure out what type of NVRAM they need for each machine. Please consult the product pages at www.pinitech.com for each type of NVRAM for further information on difficulty of installation, any jumper changes necessary on your board(s), a diagram showing location of the RAM being replaced & more. *NOTE: This list is meant as quick reference only. On Williams WPC and Sega/Stern Whitestar games you should check the RAM currently in your machine since either a 6264 or 62256 may have been used from the factory. On Williams System 11 games you should check that the chip at U25 is 24-pin (6116). See additional diagrams & notes at http://www.pinitech.com/products/cat_memory.php for assistance in locating the RAM on your board(s). PLUG-AND-PLAY (NO SOLDERING) Games below already have an IC socket installed on the boards from the factory and are as easy as removing the old RAM and installing the NVRAM (then resetting scores/settings per the manual). • BALLY 6803 → 6116 NVRAM • SEGA/STERN WHITESTAR → 6264 OR 62256 NVRAM (check IC at U212, see website) • DATA EAST → 6264 NVRAM (except Laser War) • CLASSIC BALLY → 5101 NVRAM • CLASSIC STERN → 5101 NVRAM (later Stern MPU-200 games use MPU-200 NVRAM) • ZACCARIA GENERATION 1 → 5101 NVRAM **NOT** PLUG-AND-PLAY (SOLDERING REQUIRED) The games below did not have an IC socket installed on the boards. This means the existing RAM needs to be removed from the board & an IC socket installed. -

Curriculum Vitae William C Carruth
Curriculum Vitae William C Carruth June 10, 2013 General Information University address: College of Motion Picture Arts College of Motion Picture Arts University Center Building A3100 Florida State University Tallahassee, Florida 32306-2350 Phone: 888/644-7728 E-mail address: [email protected] Professional Preparation 1969 Master's Degree, LONG BEACH CITY COLLEGE. Major: Psychology. 1967 Bachelor's Degree, Los Angeles City College. Major: Psychology. Postdegree Education and Training 2005 Pro Tools Version 9.0 for Tiger and Version 9.4 for Tiger. 2003 Post Production Techniques, Version 6.4. 2003 Pro Tools Productions Essentials, Version 6.4. 2003 Introduction to Pro Tools, Version 6.4. 1994 Avid Medial Composer 101. Professional Experience 2012–present Laboratory Assistant, College of Motion Picture Arts, Florida State University. 2009–2012 Assistant In (OPS), College of Motion Picture Arts, Florida State University. Vita for William C Carruth 2010–2011 Assistant In, College of Motion Picture Arts, Florida State University. 2005–2008 Assistant In, College of Motion Picture Arts, Florida State University. Teaching Courses Taught MFA Qualifying Project (FIL5962) Thesis Film Support (FIL3971) Advanced Workshop in Area of Specialization (FIL5636-L) Thesis Film (FIL4973) Preproduction and Production Planning (FIL5408) Film Editing (FIL5555-L) Production: Advanced Editing (FIL4567) MFA Thesis Production (FIL5977) Advanced Editing (FIL5568-L) Film Editing (FIL2552) Special Topics (FIL3932) Documentary Filmmaking (FIL3363) Documentary Filmmaking (FIL3231) Film Editing (FIL5257-L) Production: Advanced Editing (FIL4213) Research and Original Creative Work Original Creative Works Films Carruth, W. C. (Sound Editor). (2005). Into The West [TV Movie]. DreamWorks Television. Carruth, W. C. (Sound Editor). (2005). Suzanne's Dairy for Nicholas [TV Movie]. -
Manual Judge Dredd Pinball
Manual Judge Dredd Pinball Bally JUDGE DREDD pinball Planet motor assembly. Reference: 14-7985. Weight: 2 lb. $349.00. Quantity: Please enter a valid quantity. Please enter a valid. Home :: Pinball Machine Manuals :: Bally :: Bally Judge Dredd Manual. Printable version Bally Judge Dredd Manual Instant Download Version. $9.95 (€ 7.46). Shop for pinball parts, spare parts for pinball machines. Judge Dredd Operators Handbook, Bally - original Judge Dredd manual, Bally - original. €29.90 *. Visual Pinball is an amazing pinball emulator using PinMAME. The VPinball DLL This “.psrec” file is simply a recording of sounds instructions. The “.psrec” file. EPROM - new software for your game, U6, L7 Judge Dredd. EPROM Instruction card, Judge Dredd Judge Dredd Reproduction manual. Pinball parts and supplies. Glass · Greg Freres Classic Bally Framed Artwork · Hardware · Homebrew Pinball » · Cabinet Assemblies · Displays · Playfield. Manual Judge Dredd Pinball Read/Download In the manual on page 2-43 it says hswitch 67 is the left ramp entry. The photo pinside.com/pinball/forum/topic/judge-dredd-stays-on-free-play. See. Hd Judge Dredd Pinball Wallpaper Downloads Free/ Judge, Dredd, Pinball, judge judge dredd pinball right flippers won t work, judge dredd pinball manual. 4 piece set of ribbon cables for Bally JUDGE DREDD pinball machine. The PinSound board is compatible with the listed pinball machines. Indiana Jones: The Pinball Adventure. Information about PinSound with Judge Dredd. (1) · Judge Dredd (1) · Jungle Lord (2) · Jurassic Park (1) · Kings of Steel (1) · Lady Luck (1) · Laser War (1) · Last Action Hero (1) · Lethal Weapon 3 (1) · Lights. You will never find more PDF Pinball machines service manuals for this low price! With these service Bally-Midway Judge Dredd Operations & service manual. -
Demolition Man Tm
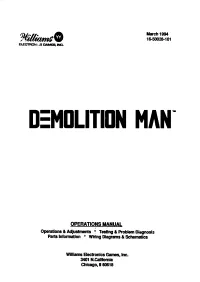
March 1994 1'(~- 16-50028-101 EU!CTRDNUS flNvlliB, INC. D:MOLITIDN MAN- OPERATIONS MANUAL . .• Operations & Adjustments ~ Testing & Problem Diagnosis Parts Information ° Wiring Diagrams & Schematics Wiiiiams El8ctronlcs Gmms, Inc. 3401 N.Califomla Chicago, 160618 ROM Jumper Chart.----.------. 1 11 M I 2M I 4M ROM I ~ I g~t I Country DIP Switch Chart SW4 Sw5 Sw6 Sw7 Sw8 American On On On On On !=1 On On Off On On Fi:e._~h On On On Off Off German On On On On Off $_Qanish On Off On On On SOLENOID I FLASHER TABLE pollnold Pllt Number Sol. Function - Solenoid Voltage Connectlonl Drive Drive Connedlonl Drive FIMhl1mp Type No. Type xllt Wire Plavfleld BICkbox C.blnlt II Pll!Yfllld B1ckbox Cabinet Color Pll!Yfllld Backbox 01 Ball Release High Power J107·3 OA'.l J130-1 Vio-Bm AE-26-1500 02 Bottom PoDDer H_jg_h Power J107-3 Oen _J_130-2 _.Y!o-Rect AE.:2.3:;800 _Q;t I Auto Plunoer .l:l!rlh Power J107·3 1"17A J130-4 Vio-Ora AE-23-800 04 1.QQ..PODllCll' 1-l!g_h Power J107-3 076 J130-5 Vio-Yel AE·28·1500 05 Oiverter Power Hl!ID Power J107-3 064 J130-6 Vio-Gm A-15943·1 06 Not Used H_jg_h Power OM Vlo-Blu 07 Knocker 1iJ1ID Power J101::! 068 J~ Vlo-Blk ~-23·8CX ...Ql. Not Used Hlah Power 070 Vlo-Grv 09 LaltSlimmbot LowPOWer J107·2 OAA ::JIV-1 ::S:m:;Bi ~200 10 R.Jg_ht Sl.!!!!l._shot Low Power J107·2 OAA J127·3 Bm-Red AE-26-1200 11 Left Jet Bumoer Low Power J107·2 054 J127·4 Bm-O_rg_ AE-26-1200 12 T®- Sllrui_shot Low Power ~07-2 l!'ill J127·5 Bm-Yel AE-26-1200 13 Right Jet Bumjljf Low Power -~07·2 )50 J127-6 Bm-Om AE-26-1200 14 i;Iect Low Power J107-2 )48 J127-7 Bm-Blu AE-26-1200 15 Dlverter Hold Low Power ~07-2 )46 J127·8 Bm·Vlo A-15943-1 16 Not Used Low Power 14- Bm~ 17 Claw Flasher Low Power .J1.U J106-5 J126-1 ,n ;,::>-_l_ Blk·Bm #906J1l #906lll 18 levato(~tor ~- ~26-2 lk· ~ed 14-7993 19 law Motor Le_! ~ 11 • J126-3 lk-4 Jrg 14-7992 1Q.