Insertion Devices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 3: Front Ends and Insertion Devices
Advanced Photon Source Upgrade Project Final Design Report May 2019 Chapter 3: Front Ends and Insertion Devices Document Number : APSU-2.01-RPT-003 ICMS Content ID : APSU_2032071 Advanced Photon Source Upgrade Project 3–ii • Table of Contents Table of Contents 3 Front Ends and Insertion Devices 1 3-1 Introduction . 1 3-2 Front Ends . 2 3-2.1 High Heat Load Front End . 6 3-2.2 Canted Undulator Front End . 11 3-2.3 Bending Magnet Front End . 16 3-3 Insertion Devices . 20 3-3.1 Storage Ring Requirements . 22 3-3.2 Overview of Insertion Device Straight Sections . 23 3-3.3 Permanent Magnet Undulators . 24 3-3.4 Superconducting Undulators . 30 3-3.5 Insertion Device Vacuum Chamber . 33 3-4 Bending Magnet Sources . 36 References 39 Advanced Photon Source Upgrade Project List of Figures • 3–iii List of Figures Figure 3.1: Overview of ID and BM front ends in relation to the storage ring components. 2 Figure 3.2: Layout of High Heat Load Front End for APS-U. 6 Figure 3.3: Model of the GRID XBPM for the HHL front end. 8 Figure 3.4: Layout of Canted Undulator Front End for APS-U. 11 Figure 3.5: Model of the GRID XBPM for the CU front end. 13 Figure 3.6: Horizontal fan of radiation from different dipoles for bending magnet beamlines. 16 Figure 3.7: Layout of Original APS Bending Magnet Front End in current APS. 17 Figure 3.8: Layout of modified APSU Bending Magnet Front End to be installed in APSU. -
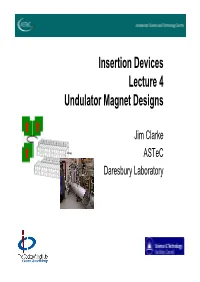
Insertion Devices Lecture 4 Undulator Magnet Designs
Insertion Devices Lecture 4 Undulator Magnet Designs Jim Clarke ASTeC Daresbury Laboratory Hybrid Insertion Devices – Inclusion of Iron Simple hybrid example Top Array e- Bottom Array 2 Lines of Magnetic Flux Including a non-linear material like iron means that simple analytical formulae can no longer be derived – linear superposition no longer works! Accurate predictions for particular designs can only be made using special magnetostatic software in either 2D (fast) or 3D (slow) e- 3 Field Levels for Hybrid and PPM Insertion Devices Assuming Br = 1.1T and gap of 20 mm When g/u is small the impact of the iron is very significant 4 Introduction We now have an understanding for how we can use Permanent Magnets to create the sinusoidal fields required by Insertion Devices Next we will look at creating more complex field shapes, such as those required for variable polarisation Later we will look at other technical issues such as the challenge of in-vacuum undulators, dealing with the large magnetic forces involved, correcting field errors, and also how and why we might cool undulators to ~150K Finally, electromagnetic alternatives will be considered 5 Helical (or Elliptical) Undulators for Variable Polarisation We need to include a finite horizontal field of the same period so the electron takes an elliptical path when it is viewed head on We want two orthogonal fields of equal period but of different amplitude and phase 3 independent variables Three independent variables are required for the arbitrary selection of any polarisation state -

A Review of High-Gain Free-Electron Laser Theory
atoms Review A Review of High-Gain Free-Electron Laser Theory Nicola Piovella 1,* and Luca Volpe 2 1 Dipartimento di Fisica “Aldo Pontremoli”, Università degli Studi di Milano, Via Celoria 16, 20133 Milano, Italy 2 Centro de Laseres Pulsados (CLPU), Parque Cientifico, 37185 Salamanca, Spain; [email protected] * Correspondence: [email protected] Abstract: High-gain free-electron lasers, conceived in the 1980s, are nowadays the only bright sources of coherent X-ray radiation available. In this article, we review the theory developed by R. Bonifacio and coworkers, who have been some of the first scientists envisaging its operation as a single-pass amplifier starting from incoherent undulator radiation, in the so called self-amplified spontaneous emission (SASE) regime. We review the FEL theory, discussing how the FEL parameters emerge from it, which are fundamental for describing, designing and understanding all FEL experiments in the high-gain, single-pass operation. Keywords: free-electron laser; X-ray emission; collective effects 1. Basic Concepts The free-electron laser is essentially a device that transforms the kinetic energy of a relativistic electron beam (e-beam) into e.m. radiation [1–4]. The e-beam passing through a transverse periodic magnetic field oscillates in a direction perpendicular to the magnetic Citation: Piovella, N.; Volpe, L. field and the propagation axis, and emits radiation confined in a narrow cone along the A Review of High-Gain Free-Electron propagation direction. The periodic magnetic field is provided by the so-called undulator, an Laser Theory. Atoms 2021, 9, 28. insertion device usually realized with two arrays of permanent magnets with alternating https://doi.org/10.3390/atoms9020028 polarities (see Figure1) or with two helical coils with current circulating in opposite directions. -

Third-Generation Synchrotron X-Ray Diffraction of 6- M Crystal of Raite, Na
Proc. Natl. Acad. Sci. USA Vol. 94, pp. 12263–12267, November 1997 Geology Third-generation synchrotron x-ray diffraction of 6-mm crystal of raite, 'Na3Mn3Ti0.25Si8O20(OH)2z10H2O, opens up new chemistry and physics of low-temperature minerals (crystal structureymicrocrystalyphyllosilicate) JOSEPH J. PLUTH*, JOSEPH V. SMITH*†,DMITRY Y. PUSHCHAROVSKY‡,EUGENII I. SEMENOV§,ANDREAS BRAM¶, CHRISTIAN RIEKEL¶,HANS-PETER WEBER¶, AND ROBERT W. BROACHi *Department of Geophysical Sciences, Center for Advanced Radiation Sources, GeologicalySoilyEnvironmental, and Materials Research Science and Engineering Center, 5734 South Ellis Avenue, University of Chicago, Chicago, IL 60637; ‡Department of Geology, Moscow State University, Moscow, 119899, Russia; §Fersman Mineralogical Museum, Russian Academy of Sciences, Moscow, 117071, Russia; ¶European Synchrotron Radiation Facility, BP 220, 38043, Grenoble, France; and UOP Research Center, Des Plaines, IL 60017 Contributed by Joseph V. Smith, September 3, 1997 ABSTRACT The crystal structure of raite was solved and the energy and metal industries, hydrology, and geobiology. refined from data collected at Beamline Insertion Device 13 at Raite lies in the chemical cooling sequence of exotic hyperal- the European Synchrotron Radiation Facility, using a 3 3 3 3 kaline rocks of the Kola Peninsula, Russia, and the 65 mm single crystal. The refined lattice constants of the Monteregian Hills, Canada (2). This hydrated sodium- monoclinic unit cell are a 5 15.1(1) Å; b 5 17.6(1) Å; c 5 manganese silicate extends the already wide range of manga- 5.290(4) Å; b 5 100.5(2)°; space group C2ym. The structure, nese crystal chemistry (3), which includes various complex including all reflections, refined to a final R 5 0.07. -

Insertion Devices at Diamond Light Source: a Retrospective Plus Future Developments
TUPAB116 Proceedings of IPAC2017, Copenhagen, Denmark INSERTION DEVICES AT DIAMOND LIGHT SOURCE: A RETROSPECTIVE PLUS FUTURE DEVELOPMENTS Z. Patel, E. C. M. Rial, A. George, S. Milward, A. J. Rose, R. P. Walker, and J. H. Williams Diamond Light Source, Didcot, UK Abstract Table 1: Installed IDs for Phase I of DLS. Peak field is given for IVU devices at 5 mm gap and I06 at 15 mm gap. 2017 marks the tenth year of Diamond operation, during which time all insertion device straights have been filled. Di- Beam ID type Period No. of Peak Field amond Light Source is a third generation, 3 GeV facility that -line [mm] Periods [T] boasts 29 installed insertion devices. Most room temperature devices have been designed, manufactured and measured I02 IVU 23 85 0.92 in-house, and progress has been made in structure design I03 IVU 21 94 0.86 and control systems to ensure new devices continue to meet I04 IVU 23 85 0.92 stringent requirements placed upon them. The ‘completion’ I06a APPLE-II 64 33 1.10 of the storage ring is not, however, the end of activity for I15 SCW 60 22.5 3.5 the ID group at Diamond, as beamlines map out potential I16 IVU 27 73 0.98 upgrade paths to Cryogenic Permanent Magnet Undulators I18 IVU 27 73 0.98 (CPMUs) and SuperConducting Undulators (SCUs). This paper traces the progress of ID design at Diamond, and maps Diamond were IVUs of periods 21 mm - 25 mm, and were out future projects such as the upgrade to CPMUs and the a continuation of the design of the Phase I devices, extra challenges of designing a fixed-gap mini-wiggler to replace constraints were being placed on future IDs that meant that a sextupole in the main storage ring lattice. -
Free Electron Lasers Lecture 2.: Insertion Devices
„Preparation of the concerned sectors for educational and R&D activities related to the Hungarian ELI project ” Free electron lasers Lecture 2.: Insertion devices Zoltán Tibai János Hebling TÁMOP-4.1.1.C-12/1/KONV-2012-0005 projekt 1 Outline Introduction and history of insertion devices Dipole magnet Quadropole magnet Chicane Undulators . Pure Permanent magnet . Hybrid design . Helical undulator . Electromagnet Planar undulator . Electromagnet Helical undulator Examples TÁMOP-4.1.1.C -12/1/KONV-2012-0005 projekt 2 Introduction Whenever an electron beam changes direction it emits radiation in a continuous frequency band. The most conspicuous example is the intense radiation produced by electron in a synchrotron orbit. It is sometimes concentrated in a certain frequency range by ‘wiggling‘ the beam as it leaves the machine with the help of a few magnets so as to follow a shape like the outline of a camel’s back. Such a device is called wiggler. Many wiggler in succession, say 50 or more, serve to concentrate the radiation spatially into a narrow cone, and spectrally into a narrow frequency interval. The beam is made wavy and waves are produced, and for this reason a multi-period wiggler is called an undulator. TÁMOP-4.1.1.C-12/1/KONV-2012-0005 projekt 3 History of insertion devices 1947 Vitaly Ginzburg showed theoretically that undulators could be built. 1951/1953 The first undulator was built by Hans Motz. 1976 Free electron laser radiation from a superconducting helical undulator. 1979/1980 First operation of insertion devices in storage rings. 1980 First operation of wavelength shifters in storage rings Today few tens of 3rd generation synchrotron radiation light sources (SASE FEL) TÁMOP-4.1.1.C-12/1/KONV-2012-0005 projekt 4 Dipole magnet A dipole magnet provides us a constant field, B. -
Effect of Insertion Devices Tapering Mode of Operation on the MAX IV Storage Rings
LUND UNIVERSITY MASTER THESIS MAXM30 Effect of Insertion Devices Tapering Mode of Operation on the MAX IV Storage Rings Author: Georgia PARASKAKI Supervisors: Sverker Werin Hamed Tarawneh June 4, 2018 Abstract Tapering is a mode of operation of insertion devices that allows the users to perform scanning in a range of photon energies. NanoMAX, BioMAX and BALDER are all beamlines of the 3 GeV MAX IV storage ring and will provide this special mode of operation for their users. In this thesis, the spectra of NanoMAX and BioMAX while operating with tapering were studied and feed forward tables that cancel out the closed orbit distortion caused by the insertion devices were generated. Moreover, a study of the nature of the closed orbit distortion was performed, aiming at simplifying the feed forward table measurements that can currently be quite time consuming. In addition, the effect of BALDER, which is a wiggler and currently the strongest insertion device in the storage ring, on the electron beam was studied. Apart from the feed forward table that corrects for the closed orbit distortion, BALDER induces a beta beat and tune shift which has to be eliminated in order to make the insertion device transparent to the electron beam. This correction is needed in order to keep the beam life time unaffected and ensure a stable operation. For this reason, a two-stage correction scheme was proposed. First, a local correction with the quadrupoles adjacent to BALDER was performed in order to eliminate the beta beat induced by the wiggler. As a second step a global correction was applied. -

FIRST COMMISSIONING of Spring-8 H
FIRST COMMISSIONING OF SPring-8 H. Kamitsubo JAERI-RIKEN SPring-8 Project Team, Kamigori, Ako-gun, Hyogo 678-12,Japan Abstract rays in the energy range from 5keV (fundamental) to 75keV (fifth harmonics) from a newly developed in- SPring-8 is the third generation synchrotron radiation vacuum undulator with a period length of 32 mm simply source in soft and hard X-ray region and consists of an by changing its gap. injector linac of 1GeV, a booster synchrotron of 8GeV and a storage ring with a natural emittance of 5.5nmrad. The storage ring can accommodate 61 beamlines in total and 26 of them are under construction. Construction started in 1991 and inauguration is scheduled in October, 1997. We started commissioning of the injector linac on August 1, 1996, and succeeded to get 1GeV electron beam a week later. The synchrotron was commissioned in December and 8GeV electron beam was successfully extracted on January 27, 1997. By the end of February 1997, installation and precise alignment of the storage ring was completed and four insertion devices ( in- vacuum undulators) were installed in the storage ring. On March 14 we started commissioning of the storage ring and immediately after we observed the first turn in the ring. After fine adjustment of the parameters we Figuire 1: Aerial view of the SPring-8 facility. The succeeded to store a 0.05mA beam in the storage ring on storage ring is built surrounding a small mountain. The March 25. Next day the first synchrotron radiations from a injectors are below the storage ring in the figure. -
Insertion Devices
Insertion Devices CERN Accelerator School, Chios 2011 Intermediate Level Course, 26.09.11 Markus Tischer, DESY, Hamburg Outline • Generation and Properties of Synchrotron Radiation • Undulator Technology • Interaction of IDs with e-Beam • Magnet Measurements and Tuning In memoriam Pascal Elleaume Countless contributions to FELs … Insertion Devices … Accelerator physics Major share in the establishment of permanent magnet based undulators Development of several new ID concepts and related components 1956-2011 Development and refinement of new ID technologies like in-vacuum undulators Realization of diverse new measurement and shimming techniques Elaboration of various simulation and analysis software Investigation of interaction of IDs with the e-beam Contributions to SR diagnostics M. Tischer | Insertion Devices | CAS Chios Sep. 2011 | Page 2 Insertion Device Alternating magnetic field Radiation e-beam Idea • Oscillating magnetic field causes a wiggling trajectory Emission of synchrotron radiation • So-called „Undulators“ or „Wigglers“ are often „inserted“ in straight sections of storage rings „Insertion Device“ • Period length ~15 400mm, magnetic gap as small as possible (5 40mm) Purpose • Intense synchrotron radiation source in electron storage rings • Emittance reduction in light sources (NSLS II, PETRAIII) • Beam damping in colliders (LEP, ) M. Tischer | Insertion Devices | CAS Chios Sep. 2011 | Page 3 Undulators in PETRA III at DESY PU10 PU08 / PU09 PU04: APPLE II M. Tischer | Insertion Devices | CAS Chios Sep. 2011 | Page 4 Synchrotron Radiation Sources & Brilliance Spectral characteristics of different SR-sources Development of brilliance: 15 orders of magnitude FEL: Peak-brilliance another ~8 orders [B] = photons/sec/mm2/mrad2/0.1%bw Brilliance = Photon flux at energy E within 0.1% bandwidth normalized to beam size and divergence n B (often used as figure of merit) 4 2 x y x y M. -

Small Signal Bi-Period Harmonic Undulator Free Electron Laser
Progress In Electromagnetics Research C, Vol. 105, 217–227, 2020 Small Signal Bi-Period Harmonic Undulator Free Electron Laser Ganeswar Mishra*, Avani Sharma, and Saif M. Khan Abstract—In this paper, we discuss the spectral property of radiation of an electron moving in a bi- period harmonic undulator field with a phase between the primary undulator field and the harmonic field component. We derive the expression for the photons per second per mrad2 per 0.1% BW of the radiation. A small signal gain analysis also is discussed highlighting this feature of the radiation. A bi-period index parameter, i.e., Λ is introduced in the calculation. According to the value of the index parameter, the scheme can operate as one period or bi-period undulator. It is shown that when Λ = π, the device operates at the fundamental and the third harmonic. However, when Λ = π/2, it is possible to eliminate the third harmonic. 1. INTRODUCTION Insertion devices are the key components of the synchrotron radiation and free electron laser sources. There are interests and technology upgrades of undulator technology for synchrotron radiation source (SRS) and free electron laser (FEL) for producing tunable electromagnetic radiation over the desired electromagnetic spectrum [1–12]. In the synchrotron radiation source, the relativistic electron beam propagates in the magnetic undulator field and emits spontaneous radiation. In the free electron laser scheme, the relativistic electron beam exchanges the kinetic energy to a co-propagating radiation field at the resonant frequency. Most insertion devices are undulators designed either as pure permanent magnet or hybrid permanent magnet according to Halbach field configuration. -

ASTRID2 -The New Low-Emmitance Light Source in Denmark
Proceedings of IPAC’10, Kyoto, Japan WEPEA008 ASTRID2 - THE NEW LOW-EMITTANCE LIGHT SOURCE IN DENMARK S.P. Møller, N. Hertel, and J.S. Nielsen, ISA, Aarhus University, Aarhus, Denmark Abstract Two families of sextupoles are installed to compensate A new low-energy synchrotron radiation light source is and vary chromaticity. Initially, strong sextupole presently being built at Aarhus University. The storage components in the combined-function dipoles were ring will circulate a 580 MeV electron beam with an proposed, but it turned out that such extended strong emittance of 10 nm. Due to the moderate lifetime of a few sextupoles reduced the dynamical aperture drastically [2]. hours, the machine will be operated in top-up mode at 200 After introduction of short sextupoles, the dynamical mA with injection from the present ASTRID storage ring. aperture could be enlarged to a value in excess of the In the present contribution, we will describe aspects of the physical aperture. However, a small negative sextupole lattice, the injection and the expected performance of the component was introduced in the dipoles as this increased machine. the vertical dynamical aperture even further by ~50 %. The main data for ASTRID2 are given in Table 1. INTRODUCTION The lattice will include 24 button pickup systems, 24 horizontal and 12 vertical correction dipoles. The ASTRID storage ring [1] has now been in operation for 20 years, and although the machine at 580 Table 1: ASTRID2 Specifications MeV has a very good lifetime in excess of 100 hours at Quantity Value 150 mA, the relatively large emittance (140 nm), the limited stability and lack of straight sections for insertion Energy 580 MeV devices has since long called for an upgrade. -
The Contribution of the Budker Institute to the SSRS-4 Insertion Devices and RF System
The contribution of the Budker Institute to the SSRS-4 Insertion devices and RF system Budker Institute of Nuclear Physics Novosibirsk BINP Magnetic elements manufacturing Common strategy for choice of insertion device User requirements B(λ), polarization ID parameters Ring parameters Technological opportunities E I е Bmax =f(λu,gap) εx εy βx βy η Δϕ FRF filling pattern Scales of project Medium scale project Large scale project Energy 3 GeV 5 –6 GeV Circumference About 500 m 1 – 1.5 km Horizontal equilibrium 250 – 400 pm∙rad 50 – 90 pm∙rad emittance Estimated cost 300 –500 M€ About 1000M€ Analogs MAX-IV ESRF-U, APS-U, SPring-8-U, HEPS 0 -50 -100 -150 Y[m] -200 -250 -150 -100 -50 0 50 100 150 X[m] Superconducting multipole wigglers BESSY, Germany, ELETTRA, CLS, Canada, 2002 17-poles, 7 Tesla Italy, 2002 2004 superconducting 49-pole 3.5 Tesla 63-pole 2 Tesla wiggler superconducting superconducting wiggler wiggler BINP CLS, Canada, DLS, England, Moscow, Siberia-2, 2007 2006 2007 27- poles 4 Tesla 49-pole 3.5 Tesla Superconducting 21-pole 7.5 Tesla superconducting wiggler superconducting wiggler wiggler DLS, England, LNLS, Brazil, ALBA, Spain, 2008 2009 2010 49-pole 4.2 Tesla 35-pole 4.2 Tesla 119-pole 2.1 Tesla superconducting superconducting superconducting wiggler wiggler wiggler 24.01.2018 5 K.Zolotarev, Superconducting wigglers in BINP Superconducting wigglers BINP SCW features • Horizontal racetrack coils Long period SC multipole wigglers λ (B 0 =7-7.5 Tesla, 0~150-200 • Coils connections with extra low mm) resistance (~ 10 -13 – 10