Biomechanics of Locomotion in Sharks, Rays, and Chimaeras
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

BONY FISHES 602 Bony Fishes
click for previous page BONY FISHES 602 Bony Fishes GENERAL REMARKS by K.E. Carpenter, Old Dominion University, Virginia, USA ony fishes constitute the bulk, by far, of both the diversity and total landings of marine organisms encoun- Btered in fisheries of the Western Central Atlantic.They are found in all macrofaunal marine and estuarine habitats and exhibit a lavish array of adaptations to these environments. This extreme diversity of form and taxa presents an exceptional challenge for identification. There are 30 orders and 269 families of bony fishes presented in this guide, representing all families known from the area. Each order and family presents a unique suite of taxonomic problems and relevant characters. The purpose of this preliminary section on technical terms and guide to orders and families is to serve as an introduction and initial identification guide to this taxonomic diversity. It should also serve as a general reference for those features most commonly used in identification of bony fishes throughout the remaining volumes. However, I cannot begin to introduce the many facets of fish biology relevant to understanding the diversity of fishes in a few pages. For this, the reader is directed to one of the several general texts on fish biology such as the ones by Bond (1996), Moyle and Cech (1996), and Helfman et al.(1997) listed below. A general introduction to the fisheries of bony fishes in this region is given in the introduction to these volumes. Taxonomic details relevant to a specific family are explained under each of the appropriate family sections. The classification of bony fishes continues to transform as our knowledge of their evolutionary relationships improves. -

Shark Cartilage, Cancer and the Growing Threat of Pseudoscience
[CANCER RESEARCH 64, 8485–8491, December 1, 2004] Review Shark Cartilage, Cancer and the Growing Threat of Pseudoscience Gary K. Ostrander,1 Keith C. Cheng,2 Jeffrey C. Wolf,3 and Marilyn J. Wolfe3 1Department of Biology and Department of Comparative Medicine, Johns Hopkins University, Baltimore, Maryland; 2Jake Gittlen Cancer Research Institute, Penn State College of Medicine, Hershey, Pennsylvania; and 3Registry of Tumors in Lower Animals, Experimental Pathology Laboratories, Inc., Sterling, Virginia Abstract primary justification for using crude shark cartilage extracts to treat cancer is based on the misconception that sharks do not, or infre- The promotion of crude shark cartilage extracts as a cure for cancer quently, develop cancer. Other justifications represent overextensions has contributed to at least two significant negative outcomes: a dramatic of experimental observations: concentrated extracts of cartilage can decline in shark populations and a diversion of patients from effective cancer treatments. An alleged lack of cancer in sharks constitutes a key inhibit tumor vessel formation and tumor invasions (e.g., refs. 2–5). justification for its use. Herein, both malignant and benign neoplasms of No available data or arguments support the medicinal use of crude sharks and their relatives are described, including previously unreported shark extracts to treat cancer (6). cases from the Registry of Tumors in Lower Animals, and two sharks with The claims that sharks do not, or rarely, get cancer was originally two cancers each. Additional justifications for using shark cartilage are argued by I. William Lane in a book entitled “Sharks Don’t Get illogical extensions of the finding of antiangiogenic and anti-invasive Cancer” in 1992 (7), publicized in “60 Minutes” television segments substances in cartilage. -
Amblyopsidae, Amblyopsis)
A peer-reviewed open-access journal ZooKeys 412:The 41–57 Hoosier(2014) cavefish, a new and endangered species( Amblyopsidae, Amblyopsis)... 41 doi: 10.3897/zookeys.412.7245 RESEARCH ARTICLE www.zookeys.org Launched to accelerate biodiversity research The Hoosier cavefish, a new and endangered species (Amblyopsidae, Amblyopsis) from the caves of southern Indiana Prosanta Chakrabarty1,†, Jacques A. Prejean1,‡, Matthew L. Niemiller1,2,§ 1 Museum of Natural Science, Ichthyology Section, 119 Foster Hall, Department of Biological Sciences, Loui- siana State University, Baton Rouge, Louisiana 70803, USA 2 University of Kentucky, Department of Biology, 200 Thomas Hunt Morgan Building, Lexington, KY 40506, USA † http://zoobank.org/0983DBAB-2F7E-477E-9138-63CED74455D3 ‡ http://zoobank.org/C71C7313-142D-4A34-AA9F-16F6757F15D1 § http://zoobank.org/8A0C3B1F-7D0A-4801-8299-D03B6C22AD34 Corresponding author: Prosanta Chakrabarty ([email protected]) Academic editor: C. Baldwin | Received 12 February 2014 | Accepted 13 May 2014 | Published 29 May 2014 http://zoobank.org/C618D622-395E-4FB7-B2DE-16C65053762F Citation: Chakrabarty P, Prejean JA, Niemiller ML (2014) The Hoosier cavefish, a new and endangered species (Amblyopsidae, Amblyopsis) from the caves of southern Indiana. ZooKeys 412: 41–57. doi: 10.3897/zookeys.412.7245 Abstract We describe a new species of amblyopsid cavefish (Percopsiformes: Amblyopsidae) in the genus Amblyopsis from subterranean habitats of southern Indiana, USA. The Hoosier Cavefish, Amblyopsis hoosieri sp. n., is distinguished from A. spelaea, its only congener, based on genetic, geographic, and morphological evi- dence. Several morphological features distinguish the new species, including a much plumper, Bibendum- like wrinkled body with rounded fins, and the absence of a premature stop codon in the gene rhodopsin. -

Fig. 125 Sharks of the World, Vol. 2 161 Fig. 125 Orectolobus Sp. A
click for previous page Sharks of the World, Vol. 2 161 Orectolobus sp. A Last and Stevens, 1994 Fig. 125 Orectolobus sp. A Last and Stevens, 1994, Sharks Rays Australia: 128, pl. 26. Synonyms: None. Other Combinations: None. FAO Names: En - Western wobbegong; Fr - Requin-tapis sombre; Sp - Tapicero occidental. LATERAL VIEW DORSAL VIEW Fig. 125 Orectolobus sp. A UNDERSIDE OF HEAD Field Marks: Flattened benthic sharks with dermal lobes on sides of head, symphysial groove on chin; a strongly contrasting, variegated colour pattern of conspicuous broad dark, dorsal saddles with light spots and deeply corrugated edges but without conspicuous black margins, interspaced with lighter areas and conspicuous light, dark-centred spots but without numerous light O-shaped rings; also, mouth in front of eyes, long, basally branched nasal barbels, nasoral grooves and circumnarial grooves, two rows of enlarged fang-like teeth in upper jaw and three in lower jaw; first dorsal-fin origin over rear half of pelvic-fin bases. Diagnostic Features: Nasal barbels with one small branch. Four dermal lobes below and in front of eye on each side of head; dermal lobes behind spiracles unbranched or weakly branched and slender. Low dermal tubercles or ridges present on back in young, lost in adults. Interdorsal space somewhat shorter than inner margin of first dorsal fin, about one-fourth of first dorsal-fin base. Origin of first dorsal fin over about last third of pelvic-fin base. First dorsal-fin height about three-fourths of base length. Colour: colour pattern very conspicuous and highly variegated, dorsal surface of body with conspicuous broad, dark rectangular saddles with deeply corrugated margins, not black-edged, dotted with light spots but without numerous O-shaped light rings; saddles not ocellate in appearance; interspaces between saddles light, with numerous broad dark blotches. -

Batoid Locomotion: Effects of Speed on Pectoral Fin Deformation in the Little Skate, Leucoraja Erinacea Valentina Di Santo1,*, Erin L
© 2017. Published by The Company of Biologists Ltd | Journal of Experimental Biology (2017) 220, 705-712 doi:10.1242/jeb.148767 RESEARCH ARTICLE Batoid locomotion: effects of speed on pectoral fin deformation in the little skate, Leucoraja erinacea Valentina Di Santo1,*, Erin L. Blevins1,2 and George V. Lauder1 ABSTRACT more efficient at higher speeds and for long-distance translocations Most batoids have a unique swimming mode in which thrust is (Di Santo and Kenaley, 2016). Although many batoid species are generated by either oscillating or undulating expanded pectoral fins accurately described by these two extreme modes, several species that form a disc. Only one previous study of the freshwater stingray has fall into a continuum between 0.5 and 1.0 wave, and are defined as quantified three-dimensional motions of the wing, and no comparable ‘semi-oscillators’ (Schaefer and Summers, 2005). data are available for marine batoid species that may differ The mechanics of propulsion in cartilaginous fishes have been considerably in their mode of locomotion. Here, we investigate three- investigated over the years through studies of morphology, dimensional kinematics of the pectoral wing of the little skate, kinematics, hydrodynamics, muscle activity and energetics Leucoraja erinacea, swimming steadily at two speeds [1 and (Daniel, 1988; Di Santo and Kenaley, 2016; Donley and 2 body lengths (BL) s−1]. We measured the motion of nine points in Shadwick, 2003; Fontanella et al., 2013; Lauder, 2015; Lauder three dimensions during wing oscillation and determined that there are and Di Santo, 2015; Porter et al., 2011; Rosenberger and Westneat, significant differences in movement amplitude among wing locations, 1999; Rosenblum et al., 2011). -
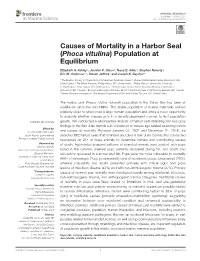
Causes of Mortality in a Harbor Seal Population at Equilibrium
fmars-07-00319 May 11, 2020 Time: 19:31 # 1 ORIGINAL RESEARCH published: 13 May 2020 doi: 10.3389/fmars.2020.00319 Causes of Mortality in a Harbor Seal (Phoca vitulina) Population at Equilibrium Elizabeth A. Ashley1, Jennifer K. Olson2, Tessa E. Adler3, Stephen Raverty4, Eric M. Anderson5,3, Steven Jeffries6 and Joseph K. Gaydos1* 1 The SeaDoc Society, UC Davis School of Veterinary Medicine, Karen C. Drayer Wildlife Health Center, Eastsound, WA, United States, 2 The Whale Museum, Friday Harbor, WA, United States, 3 Friday Harbor Laboratories, University of Washington, Friday Harbor, WA, United States, 4 Animal Health Centre, British Columbia Ministry of Agriculture, Abbotsford, BC, Canada, 5 Ecological Restoration Program, British Columbia Institute of Technology, Burnaby, BC, Canada, 6 Marine Mammal Investigations, Washington Department of Fish and Wildlife, Tacoma, WA, United States The harbor seal (Phoca vitulina richardii) population in the Salish Sea has been at equilibrium since the mid-1990s. This stable population of marine mammals resides relatively close to shore near a large human population and offers a novel opportunity to evaluate whether disease acts in a density-dependent manner to limit population growth. We conducted a retrospective analysis of harbor seal stranding and necropsy findings in the San Juan Islands sub-population to assess age-related stranding trends Edited by: Alastair Martin Mitri Baylis, and causes of mortality. Between January 01, 2002 and December 31, 2018, we South Atlantic Environmental detected 882 harbor seals that stranded and died in San Juan County and conducted Research Institute, Falkland Islands necropsies on 244 of these animals to determine primary and contributing causes Reviewed by: of death. -
Florida's Fintastic Sharks and Rays Lesson and Activity Packet
Florida's Fintastic Sharks and Rays An at-home lesson for grades 3-5 Produced by: This educational workbook was produced through the support of the Indian River Lagoon National Estuary Program. 1 What are sharks and rays? Believe it or not, they’re a type of fish! When you think “fish,” you probably picture a trout or tuna, but fishes come in all shapes and sizes. All fishes share the following key characteristics that classify them into this group: Fishes have the simplest of vertebrate hearts with only two chambers- one atrium and one ventricle. The spine in a fish runs down the middle of its back just like ours, making fish vertebrates. All fishes have skeletons, but not all fish skeletons are made out of bones. Some fishes have skeletons made out of cartilage, just like your nose and ears. Fishes are cold-blooded. Cold-blooded animals use their environment to warm up or cool down. Fins help fish swim. Fins come in pairs, like pectoral and pelvic fins or are singular, like caudal or anal fins. Later in this packet, we will look at the different types of fins that fishes have and some of the unique ways they are used. 2 Placoid Ctenoid Ganoid Cycloid Hard protective scales cover the skin of many fish species. Scales can act as “fingerprints” to help identify some fish species. There are several different scale types found in bony fishes, including cycloid (round), ganoid (rectangular or diamond), and ctenoid (scalloped). Cartilaginous fishes have dermal denticles (Placoid) that resemble tiny teeth on their skin. -

Download the Full Article As Pdf ⬇︎
LocalLockdown Diving — Dives Found in Contributors' Backyards Text and photos by Andrey Bizyukin, Larry Cohen, Brent Durand, Dmitry Efremychev, Jennifer Idol, Kate Jonker, Matthew Meier, Pete Mesley, Don Silcock, Olga Torrey and Martin Voeller As many divers face travel restrictions during the coronavi- rus pandemic, our contributors highlight the often overlooked or unsung yet intriguing div- ing that can be found in one's own backyard. X-Ray Mag contributors share their favorite local haunts—from a spring-fed Texan lake to a quarry and a sinkhole in Russia to the tem- perate waters off New Zealand, Japan, South Africa, New Jersey and Northern California to the subtropical waters of Southern California and Sydney, Australia—where they captured compelling underwater images. 58 X-RAY MAG : 101 : 2020 EDITORIAL FEATURES TRAVEL NEWS WRECKS EQUIPMENT BOOKS SCIENCE & ECOLOGY TECH EDUCATION PROFILES PHOTO & VIDEO PORTFOLIO MATTHEW MEIER feature Local Dives School of opaleye and garibaldi among sea grass and feather boa kelp. PREVIOUS PAGE: School of juvenile senorita fish in the kelp and sea grass beds Bat Ray Cove, San Clemente Island, Soupfin (tope) sharks can be seen swimming in California, USA the shallows and among the giant kelp, along with schools of blacksmith and jack mackerels. Text and photos by Matthew Meier California sea lions will swoop through intermittently, and the occasional harbor seal Thankfully, local diving is still possible during will play peak-a-boo in the kelp. the pandemic, and while this dive site requires Under the boat is a sandy bottom where boat access, it is still one of my favorites. -

03 07049 Sharks.Qxd:CFN 122(2) 11/4/09 10:08 AM Page 124
03_07049_sharks.qxd:CFN 122(2) 11/4/09 10:08 AM Page 124 Abundance Trends for Hexanchus griseus, Bluntnose Sixgill Shark, and Hydrolagus colliei, Spotted Ratfish, Counted at an Automated Underwater Observation Station in the Strait of Georgia, British Columbia ROBERT DUNBRACK Biology Department, Memorial University of Newfoundland, St. John’s, Newfoundland and Labrador A1B 3X9 Canada; e- mail: dunbrack@ mun.ca Dunbrack, Robert. 2008. Abundance trends for Hexanchus griseus, Bluntnose Sixgill Shark, and Hydrolagus colliei, Spotted Ratfish, counted at an automated underwater observation station in the Strait of Georgia, British Columbia. Canadian Field-Naturalist 122(2): 124-128. Recordings from a time lapse video monitoring station on a shallow rocky reef in the Strait of Georgia, British Columbia, revealed a steep and continuous decline in the occurrence of Hexanchus griseus (Bluntnose Sixgill Shark) between 2001 and 2007, with relative abundance in 2006 and 2007 less than 1% of that in 2001. The relative abundance of another chondrichthyan, Hydrolagus colliei (Spotted Ratfish), decreased to 15% of 2004 levels in 2005 and 2006 and remained below 25% in 2007. There is no compelling explanation for these decreases. Over the past 25 years water temperatures have increased in the Strait of Georgia and there have been a number of El Niño warm water events, but diver observations of H. griseus at this site over the same time period give no indication of prior changes in abundance. Neither species is targeted by a fishery, but injuries, possibly related to hooking and entanglement, observed in 28% of individually identified H. griseus suggests this species may be taken locally as bycatch. -

Chondrichthyes: Carcharhiniformes: Scyliorhinidae) from the Gulf of Aden
Zootaxa 3881 (1): 001–016 ISSN 1175-5326 (print edition) www.mapress.com/zootaxa/ Article ZOOTAXA Copyright © 2014 Magnolia Press ISSN 1175-5334 (online edition) http://dx.doi.org/10.11646/zootaxa.3881.1.1 http://zoobank.org/urn:lsid:zoobank.org:pub:809A2B3B-2C2C-4D26-A50F-6D5185D3BD6A Apristurus breviventralis, a new species of deep-water catshark (Chondrichthyes: Carcharhiniformes: Scyliorhinidae) from the Gulf of Aden JUNRO KAWAUCHI1,4, SIMON WEIGMANN2 & KAZUHIRO NAKAYA3 1Chair of Marine Biology and Biodiversity (Systematic Ichthyology), Graduate School of Fisheries Sciences, Hokkaido University, 3- 3-1 Minato-cho, Hakodate Hokkaido 041-8611, Japan. E-mail: junro@ frontier.hokudai.ac.jp 2Biocenter Grindel and Zoological Museum, University of Hamburg, Section Ichthyology, Martin-Luther-King-Platz 3, D-20146 Hamburg, Germany. E-mail: [email protected] 3Hokkaido University, 3-1-1 Minato-cho, Hakodate, Hokkaido 041-8611, Japan. E-mail: [email protected] 4Corresponding author Abstract A new deep-water catshark of the genus Apristurus Garman, 1913 is described based on nine specimens from the Gulf of Aden in the northwestern Indian Ocean. Apristurus breviventralis sp. nov. belongs to the ‘brunneus group’ of the genus and is characterized by having pectoral-fin tips reaching beyond the midpoint between the paired fin bases, a much shorter pectoral-pelvic space than the anal-fin base, a low and long-based anal fin, and a first dorsal fin located behind pelvic-fin insertion. The new species most closely resembles the western Atlantic species Apristurus canutus, but is distinguishable in having greater nostril length than internarial width and longer claspers in adult males. -

From the Sülstorf Beds (Chattian, Late Oligocene) of the Southeastern North Sea Basin, Northern Germany
ARTICLE Two new scyliorhinid shark species (Elasmobranchii, Carcharhiniformes, Scyliorhinidae), from the Sülstorf Beds (Chattian, Late Oligocene) of the southeastern North Sea Basin, northern Germany THOMAS REINECKE Auf dem Aspei 33, D-44801 Bochum, Germany E-mail: [email protected] Abstract: Based on isolated teeth two new scyliorhinid shark species, Scyliorhinus biformis nov. sp. and Scyliorhinus suelstorfensis nov. sp., are described from the Sülstorf Beds, early to middle Chattian, of Mecklenburg, north-eastern Germany. They form part of a speciose assemblage of nectobenthic sharks and batoids which populated the warm-temperate to subtropical upper shelf sea of the south-eastern North Sea Basin. Keywords: Scyliorhinus, Scyliorhinidae, Elasmobranchii, Chattian, North Sea Basin. Submitted 14 February 2014, Accepted 14 April 2014 © Copyright Thomas Reinecke April 2014 INTRODUCTION of the south-eastern North Sea Basin (Von Bülow & Müller, 2004; Standke et al., 2005). The succession comprises the early Chattian basal Plate Beds (0-20 m), the early to middle Chat- Elasmobranch assemblages of the Chattian in the boreal pro- tian Sülstorf Beds (ca. 80 m), and the late Chattian Rogahn vince are comparably less well studied than those of the Rupe- Beds (ca. 30 m thick; Von Bülow, 2000). Whereas the Plate lian and Neogene. This is mainly due to the limited access to Beds consist of fossil-poor, silty clays and silts, continuing the Chattian deposits which have very localized occurrences and basin-type sedimentation of the underlying Rupel Clay, the were only temporarily exposed in the northern peripheral zo- Sülstorf Beds (= “Sülstorfer Schichten”, Lotsch, 1981) are a nes of the Mesozoic low mountain ranges of Lower Saxony sequence of calcareous silts containing glauconite and white (Doberg, Astrup), and Hesse (Ahnetal, Glimmerode, Nieder- mica, that are coarsening upwards into well sorted fine sands. -

Gobiodon Winterbottomi, a New Goby (Actinopterygii: Perciformes: Gobiidae) from Iriomote-Jima Island, the Ryukyu Islands, Japan
Bull. Natl. Mus. Nat. Sci., Ser. A, Suppl. 6, pp. 59–65, March 30, 2012 Gobiodon winterbottomi, a New Goby (Actinopterygii: Perciformes: Gobiidae) from Iriomote-jima Island, the Ryukyu Islands, Japan Toshiyuki Suzuki1, Korechika Yano2 and Hiroshi Senou3 1 Kawanishi-midoridai Senior High School, 1–8 Kouyoudai, Kawanishi, Hyogo 666–0115, Japan E-mail: [email protected] 2 Dive Service Yano, 537 Uehara, Taketomi-cho, Okinawa 907–1541, Japan 3 Kanagawa Prefectural Museum of Natural History, 499 Iryuda, Odawara, Kanagawa 250–0031, Japan E-mail: [email protected] Abstract The gobiid ¿sh Gobiodon winterbottomi is described as a new species from three spec- imens (19.0–32.9 mm SL) collected from Echinopora lamellose, the plate-shaped coral of the fam- ily Faviidae, in 5 m depth on the reef slope off Iriomote-jima Island, the Ryukyu Islands, Japan. It is characterized by the following in combination: the jaw teeth subequal in shape and size; lack of post-symphysial canine teeth; lack of an interopercle-isthmus groove; a narrow gill opening; lack of elongated dorsal-¿n spines; large second dorsal, anal and pelvic ¿ns; 15 or 16 pectoral-¿n rays; and head, body and ¿ns gray, absence of stripes or other markings when fresh or alive. Key words: Gobiodon winterbottomi, new species, Gobiidae, Ryukyu Islands, Japan. Gobiodon Bleeker, 1856 is an Indo-Paci¿c Sawada and Arai, 1972 (validity questionable), gobiid ¿sh genus, comprising often colorful, Gobiodon axillaris De Viz, 1884, Gobiodon bro- tropical species living in obligate commensal chus (Harold and Winterbottom, 1999), Gobio- association with reef-building corals.