Geometrical Formalism for Dynamically Corrected Gates in Multiqubit Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
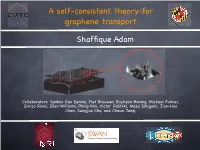
Shaffique Adam a Self-Consistent Theory for Graphene Transport
A self-consistent theory for graphene transport Shaffique Adam Collaborators: Sankar Das Sarma, Piet Brouwer, Euyheon Hwang, Michael Fuhrer, Enrico Rossi, Ellen Williams, Philip Kim, Victor Galitski, Masa Ishigami, Jian-Hao Chen, Sungjae Cho, and Chaun Jang. Schematic 1. Introduction - Graphene transport mysteries - Need for a hirarchy of approximations - Sketch of self-consistent theory: discussion of ansatz and its predictions 2. Characterizing the Dirac Point - What the Dirac point really looks like - Comparison of self-consistent theory and energy functional minimization results 3. Quantum to classical crossover 4. Effective medium theory 5. Comparison with experiments Introduction to graphene transport mysteries High Density Low Density Hole carriers Electron carriers E electrons kx ky holes n Figure from Novoselov et al. (2005) Vg n Fuhrer group (unpublished) 2006 ∝ - Constant (and high) mobility over a wide range of density. Dominant scattering mechanism? - Minimum conductivity plateau ? - Mechanism for conductivity without carriers? What could be going on? Graphene - Honeycomb lattice: Dirac cone with trigonal warping, - Disorder: missing atoms, ripples, edges, impurities (random or correlated) - Interactions: screening, exchange, correlation, velocity/disorder renormalization - Phonons - Localization: quantum interference - Temperature - ... Exact solution is impossible -> reasonable hierarchy of approximations Any small parameters? - For transport, we can use a low energy effective theory i.e. Dirac Hamiltonian. Corrections, -

Electronic Structure of Full-Shell Inas/Al Hybrid Semiconductor-Superconductor Nanowires: Spin-Orbit Coupling and Topological Phase Space
Electronic structure of full-shell InAs/Al hybrid semiconductor-superconductor nanowires: Spin-orbit coupling and topological phase space Benjamin D. Woods,1 Sankar Das Sarma,2 and Tudor D. Stanescu1, 2 1Department of Physics and Astronomy, West Virginia University, Morgantown, WV 26506, USA 2Condensed Matter Theory Center and Joint Quantum Institute, Department of Physics, University of Maryland, College Park, Maryland, 20742-4111, USA We study the electronic structure of full-shell superconductor-semiconductor nanowires, which have recently been proposed for creating Majorana zero modes, using an eight-band ~k · ~p model within a fully self-consistent Schrodinger-Poisson¨ scheme. We find that the spin-orbit coupling induced by the intrinsic radial electric field is generically weak for sub-bands with their minimum near the Fermi energy. Furthermore, we show that the chemical potential windows consistent with the emergence of a topological phase are small and sparse and can only be reached by fine tunning the diameter of the wire. These findings suggest that the parameter space consistent with the realization of a topological phase in full-shell InAs/Al nanowires is, at best, very narrow. Hybrid semiconductor-superconductor (SM-SC) nanowires butions) and ii) the electrostatic effects (by self-consistently have recently become the subject of intense research in the solving a Schrodinger-Poisson¨ problem). We note that these context of the quest for topological Majorana zero modes are crucial issues for the entire research field of SM-SC hy- (MZMs) [1,2]. Motivated by the promise of fault-tolerant brid nanostructures, but they have only recently started to be topological quantum computation [3,4] and following con- addressed, and only within single-orbital approaches [27–30]. -

Sankar Das Sarma 3/11/19 1 Curriculum Vitae
Sankar Das Sarma 3/11/19 Curriculum Vitae Sankar Das Sarma Richard E. Prange Chair in Physics and Distinguished University Professor Director, Condensed Matter Theory Center Fellow, Joint Quantum Institute University of Maryland Department of Physics College Park, Maryland 20742-4111 Email: [email protected] Web page: www.physics.umd.edu/cmtc Fax: (301) 314-9465 Telephone: (301) 405-6145 Published articles in APS journals I. Physical Review Letters 1. Theory for the Polarizability Function of an Electron Layer in the Presence of Collisional Broadening Effects and its Experimental Implications (S. Das Sarma) Phys. Rev. Lett. 50, 211 (1983). 2. Theory of Two Dimensional Magneto-Polarons (S. Das Sarma), Phys. Rev. Lett. 52, 859 (1984); erratum: Phys. Rev. Lett. 52, 1570 (1984). 3. Proposed Experimental Realization of Anderson Localization in Random and Incommensurate Artificial Structures (S. Das Sarma, A. Kobayashi, and R.E. Prange) Phys. Rev. Lett. 56, 1280 (1986). 4. Frequency-Shifted Polaron Coupling in GaInAs Heterojunctions (S. Das Sarma), Phys. Rev. Lett. 57, 651 (1986). 5. Many-Body Effects in a Non-Equilibrium Electron-Lattice System: Coupling of Quasiparticle Excitations and LO-Phonons (J.K. Jain, R. Jalabert, and S. Das Sarma), Phys. Rev. Lett. 60, 353 (1988). 6. Extended Electronic States in One Dimensional Fibonacci Superlattice (X.C. Xie and S. Das Sarma), Phys. Rev. Lett. 60, 1585 (1988). 1 Sankar Das Sarma 7. Strong-Field Density of States in Weakly Disordered Two Dimensional Electron Systems (S. Das Sarma and X.C. Xie), Phys. Rev. Lett. 61, 738 (1988). 8. Mobility Edge is a Model One Dimensional Potential (S. -

Table of Contents (Print)
NEWSPAPER 97 Kinetic energy (vertical) of deuterons after fragmentation of deuterium molecules in a pump-probe experiment, for a given time delay (horizontal) between the pump and the probe pulses. Colors denote the number of deuterons, with orange-yellow being the highest. See article 193001. PHYSICAL REVIEW LETTERS PRL 97 (19), 190201– 199901, 10 November 2006 (280 total pages) Contents Articles published 4 November–10 November 2006 VOLUME 97, NUMBER 19 10 November 2006 General Physics: Statistical and Quantum Mechanics, Quantum Information, etc. Quantum Feedback Control for Deterministic Entangled Photon Generation .......................................... 190201 Masahiro Yanagisawa General Approach to Quantum-Classical Hybrid Systems and Geometric Forces ..................................... 190401 Qi Zhang and Biao Wu Condensation of N Interacting Bosons: A Hybrid Approach to Condensate Fluctuations ............................. 190402 Anatoly A. Svidzinsky and Marlan O. Scully Dipole Polarizability of a Trapped Superfluid Fermi Gas . ............................................................ 190403 A. Recati, I. Carusotto, C. Lobo, and S. Stringari Loschmidt Echo in a System of Interacting Electrons ................................................................ 190404 G. Manfredi and P.-A. Hervieux Detection Scheme for Acoustic Quantum Radiation in Bose-Einstein Condensates . ................................. 190405 Ralf Schu¨tzhold Quantum Stripe Ordering in Optical Lattices . ........................................................................ -
Theory and Modeling in Nanoscience
Theory and Modeling in Nanoscience Report of the May 10–11, 2002, Workshop Conducted by the Basic Energy Sciences and Advanced Scientific Computing Advisory Committees to the Office of Science, Department of Energy Cover illustrations: TOP LEFT: Ordered lubricants confined to nanoscale gap (Peter Cummings). BOTTOM LEFT: Hypothetical spintronic quantum computer (Sankar Das Sarma and Bruce Kane). TOP RIGHT: Folded spectrum method for free-standing quantum dot (Alex Zunger). MIDDLE RIGHT: Equilibrium structures of bare and chemically modified gold nanowires (Uzi Landman). BOTTOM RIGHT: Organic oligomers attracted to the surface of a quantum dot (F. W. Starr and S. C. Glotzer). Theory and Modeling in Nanoscience Report of the May 10–11, 2002, Workshop Conducted by the Basic Energy Sciences and Advanced Scientific Computing Advisory Committees to the Office of Science, Department of Energy Organizing Committee C. William McCurdy Co-Chair and BESAC Representative Lawrence Berkeley National Laboratory Berkeley, CA 94720 Ellen Stechel Co-Chair and ASCAC Representative Ford Motor Company Dearborn, MI 48121 Peter Cummings The University of Tennessee Knoxville, TN 37996 Bruce Hendrickson Sandia National Laboratories Albuquerque, NM 87185 David Keyes Old Dominion University Norfolk, VA 23529 This work was supported by the Director, Office of Science, Office of Basic Energy Sciences and Office of Advanced Scientific Computing Research, of the U.S. Department of Energy. Table of Contents Executive Summary.......................................................................................................................1 -

Topics in Cold Atoms Related to Quantum Information Processing and a Machine Learning Approach to Condensed Matter Physics
Topics in Cold Atoms Related to Quantum Information Processing and A Machine Learning Approach to Condensed Matter Physics Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Jiaxin Wu, B.S., M.S. Graduate Program in Physics The Ohio State University 2019 Dissertation Committee: Professor Tin-Lun Ho, Advisor Professor Nandini Trivedi Professor Rolando Vald´es Aguilar Professor Eric Braaten c Copyright by Jiaxin Wu 2019 Abstract This thesis is mainly focused on three topics: Majorana excitations in a number- conserving model, manipulation of quasi-particle excitations in quantum Hall systems, and a new machine learning algorithm to find the ground states of a general Hamil- tonian. In condensed matter physics, Majorana fermions are emergent excitations which are candidates for quantum memory and topological quantum computation. The first and simplest model revealing these excitations does not conserve particle number. Its experimental realization in solid state materials is difficult and still under debate. In comparison, cold atoms provide an alternative platform to realize these exotic excitations. However, cold atoms experiments require the system to be number- conserving. Theoretically, it is not yet clear whether there is a model realizable in cold atoms that also hosts these exotic excitations. In this thesis, we investigate such a number-conserving model and show that it has the same phase diagram and very similar excitations. Although the ground state degeneracy, as one of the signature properties of the original Majorana model crucial for quantum memory, is not present when the total particle number is fixed, one can recover the degeneracy by allowing tunnelling to change the total particle number. -

Nanoelectronics, Nanophotonics, and Nanomagnetics Report of the National Nanotechnology Initiative Workshop February 11–13, 2004, Arlington, VA
National Science and Technology Council Committee on Technology Nanoelectronics, Subcommittee on Nanoscale Science, Nanophotonics, and Nanomagnetics Engineering, and Technology National Nanotechnology Report of the National Nanotechnology Initiative Workshop Coordination Office February 11–13, 2004 4201 Wilson Blvd. Stafford II, Rm. 405 Arlington, VA 22230 703-292-8626 phone 703-292-9312 fax www.nano.gov About the Nanoscale Science, Engineering, and Technology Subcommittee The Nanoscale Science, Engineering, and Technology (NSET) Subcommittee is the interagency body responsible for coordinating, planning, implementing, and reviewing the National Nanotechnology Initiative (NNI). The NSET is a subcommittee of the Committee on Technology of the National Science and Technology Council (NSTC), which is one of the principal means by which the President coordinates science and technology policies across the Federal Government. The National Nanotechnology Coordination Office (NNCO) provides technical and administrative support to the NSET Subcommittee and supports the subcommittee in the preparation of multi- agency planning, budget, and assessment documents, including this report. For more information on NSET, see http://www.nano.gov/html/about/nsetmembers.html . For more information on NSTC, see http://www.ostp.gov/cs/nstc . For more information on NNI, NSET and NNCO, see http://www.nano.gov . About this document This document is the report of a workshop held under the auspices of the NSET Subcommittee on February 11–13, 2004, in Arlington, Virginia. The primary purpose of the workshop was to examine trends and opportunities in nanoscale science and engineering as applied to electronic, photonic, and magnetic technologies. About the cover Cover design by Affordable Creative Services, Inc., Kathy Tresnak of Koncept, Inc., and NNCO staff. -

Neutrino As Majorana
Sankar Das Sarma, Univ. of Maryland April 15, 2011 • Majorana/Fermi (1937) : “Real version” of Dirac Theory • Majorana disappears (1938) • Neutrino as Majorana (??): Double beta decay (lepton number!) • Neutralino of SUSY is a Majorana fermion • Read and Green (2000): 5/2 FQHE = Chiral p+ip SC • Kitaev (2001): Majorana 1D chain • Das Sarma, Freedman, Nayak (2005): 5/2 FQH ‘Majorana’ Qubit • Das Sarma, Nayak, Tewari (2006):SrRuO4 Majorana (half-vortex) • Fu, Kane (2008): Topological Insulator + SC • Sau, Lutchyn, Tewari, Das Sarma (2010): SO/SM + SC + FMI • Alicea (2010): SO/SM + SC • Lutchyn, Sau, Das Sarma (2010): Majorana Nanowire • Freedman, Kitaev: Topological Quantum Computation (~1995---) CHIRAL, p-WAVE, SPINLESS; ZERO ENERGY MODE AT THE CORE Order parameter phase rotates by around the core Order parameter amplitude suppressed at the core Majorana is an anyon Bound states in vortex Not a regular fermion because it is zero- cores are e-h symmetric energy! Low energy normal bound states in the core ZERO-ENERGY CORE STATE IS MAJORANA PROTECTED BY INDEX THEOREM (e-h symmetry) Missing operations in TQC using Majorana (Ising anyons) Nayak, Simon, Stern, Freedman, Das Sarma, Rev. Mod. Phys. (2008) Ising anyons are almost universal: need ϑ = π/4 phase gate and CNOT gate. " ! CNOT gate can be implemented by measuring the total parity of two topological qubits " ! One idea for ϑ = π/4 phase gate is Dynamical Topology Change (DTC) (Bravyi, Kitaev 2000; Bonderson, Das Sarma, Freedman, Nayak 2010) Hard to implement in FQHE systems, but perhaps -

Exotic Order….” L
SUMMARY of the Conference on Exotic Order and Criticality in Quantum Matter EXOTIC ORDER AND CRITICALITY IN QUANTUM MATTER June 7-11 22 Talks: 40+20 minutes with active discussion 7 Experimental talks;15 Theoretical talks(Not necessarily connected) WHAT IS ‘EXOTIC’ (AND WHY)? “…organization of strongly interacting quantum condensed matter which do not fit the standard paradigms of solid state and statistical physics …rather than attacking “from the bottom up” …. this program will take the “top down” approach of focusing on qualitatively new concepts” VERY AMBITIOUS GOAL “EXOTIC ORDER….” L. exoticus; G. exotikos • Introduced from another country • Not native to the place where found • OUTLANDISH, ALIEN (arch.) • Strikingly, excitingly different or unusual • Relating to striptease ??? IN THIS CASE ‘EXOTIC’ MEANS UNUSUAL: PERHAPS BEYOND CURRENT PARADIGMS IF ONE IS LUCKY Sankar Das Sarma, Univ of Maryland (KITP Exotic Order Conf 6/11/04) 1 SUMMARY of the Conference on Exotic Order and Criticality in Quantum Matter PARADIGMS! (Paradigm shifts are, fortunately, rare) Superconductivity,Superfluidity, QHE, FQHE Anderson localization, Mott transition, Josephson effect, Abrikosov vortex lattice (matter), Kondo problem, Luttinger liquid, Topological(KT) order BAND THEORY FERMI LIQUID THEORY PERTURBATION THEORY MEAN FIELD THEORY LGW THEORY WARNING: EFFECTIVE FIELD THEORY OFTEN PREDICTS POSSIBILITIES OR SCENARIOS FOR EXOTIC ORDER AND CRITICALITY, WHICH DO NOT ALWAYS OCCUR IN NATURE (e.g. PRB66,195334(2002);B68,165303(2003): 27+47pp.) ISOSPIN SKYRMION STRIPES NATURE MAY SOMETIMES BE BORING (SUCH IS LIFE) NEED NUMERICAL WORK & EVENTUALLY EXPERIMENTS Sankar Das Sarma, Univ of Maryland (KITP Exotic Order Conf 6/11/04) 2 SUMMARY of the Conference on Exotic Order and Criticality in Quantum Matter ‘PARADIGMS’ (buzzwords in this conference) JUST THE TITLES e.g. -

Novel Gate May Enhance Power of Majorana-Based Quantum Computers
Novel gate may enhance power of Majorana- based quantum computers 11 May 2016 computing is that these particles don't support the full power of a general quantum computer—even in theory. Now, researchers at JQI and the Condensed Matter Theory Center (CMTC) at the University of Maryland, including JQI Fellows Sankar Das Sarma and Jay Deep Sau, have proposed a way to dispense with both of these problems. By adding an extra process beyond ordinary braiding, they discovered a way to give a certain breed of topological particles all the tools needed to run any quantum calculation, all while circumventing the Credit: S. Kelley/NIST need for actual braiding. The team described their proposal last month in Physical Review X (link is external). Quantum computers hold great potential, but they remain hard to build because their basic components—individual quantum systems like atoms, electrons or photons—are fragile. A relentless and noisy background constantly bombards the computer's data. One promising theoretical approach, known as topological quantum computing, uses groups of special particles confined to a plane to combat this environmental onslaught. The particles, which arise only in carefully crafted materials, are held apart from each other so that the information they store is spread out in space. In this way, information is hidden from its noisy environment, which tends to disrupt small regions at a time. Such a computer would perform calculations by moving the particles around one another in a plane, creating intricate braids with the paths they trace in space and time. Although evidence for these particles has been found in experiments, the most useful variety found The new proposal continues a line of research that so far appear only at the ends of tiny wires and began at JQI and CMTC in 2010. -

Curriculum Vitae Jason Kestner
CURRICULUM VITAE JASON KESTNER EDUCATION Ph.D. 2009 University of Michigan, Physics, Advisor: Prof. Luming Duan, Dissertation: Effective Single-Band Hamiltonians for Strongly Interacting Ultracold Fermions in an Optical Lattice B.S. 2004 Michigan Technological University, Physics A.S. 2002 Jackson Community College, Jackson, MI Experience in Higher Education 2018 – present UMBC, Associate Professor, Physics 2012 – 2018 UMBC, Assistant Professor, Physics 2009 – 2012 University of Maryland, College Park, Postdoctoral Research Associate, Physics Honors Received 2018 Carl S. Weber Excellence in Teaching Award, UMBC College of Natural and Mathematical Sciences 2005 Outstanding First-Year Graduate Student Instructor Award, UM Physics Research Support and/or Fellowships 2019-2022 $300K, NSF/PHY/QIS: “Dynamically Corrected Nonadiabatic Geometric Quantum Logic Gates” 2017-2020 $1.05M team grant, UMBC subtotal $390K , ARO/LPS: “Theory of Non- Markovian Noise Correction in Multi-Qubit Gate Operations” [PI Jason Kestner, co-PIs Ed Barnes (VT), Sophia Economou (VT), Sankar Das Sarma (UMD)] 2016-2019 $210K, NSF/PHY/PIF: “Entangling Qubits with High Fidelity via Nonlocal Echo Sequences” Ph.D. Students (Committee Chair) Fernando Calderon-Vargas PhD 2016, Physics, current position: postdoctoral research associate, Physics, Virginia Tech Ralph Colmenar Physics Postdoctoral Researchers Utkan Gungordu 2017-present JASON KESTNER 2 CURRICULUM VITAE PUBLICATIONS, PRESENTATIONS, AND CREATIVE ACHIEVEMENTS Publications Please check the updated and hyperlinked list of publications and preprints maintained at http://kestnergroup.umbc.edu/publications/. In the list below, the first author is always the primary author. Underlined names are my advisees, students for whom I served as the primary research advisor. Names that are both underlined and bolded are undergraduate students for whom I served as the primary research advisor. -

Quantum Reality
K A V L I I N S T I T U T E F O R T H E O R E T I C A L P H Y S I C S Presents The Thirty Ninth KITP Public Lecture Sponsored by Friends of KITP Sankar Das Sarma Quantum Reality UANTUM MECHANIC S , the underlying microscopic theory of our existence governing the behavior of the physical world, is the crowning success of human intellect. It is astonishingly success- Qful – no experiment contradicts the predictions of the theory, and the theory has been explicitly verified to be correct to a precision better than 1 part in 1012. In the past 60 years, developments of quantum theory have led to the modern technology that has revolutionized the world through applications such as transistors, lasers, and magnetic discs. Despite this great success we really do not understand the quantum theory in an in- tuitive manner because quantum laws are so radically different from the Admission is Free classical laws of physics. The dichotomy that the modern world is quan- tum, but the precise meaning of the quantum remains elusive, disturbed Seating is by RSVP only the stalwarts of physics such as Einstein, Schrodinger, and Feynman, Please e-mail: and continues to baffle physicists even today. This lecture will explore this curious state of affairs, highlighting the numerous quantum based [email protected] ideas and applications which underpin our modern world and the sublime or call strangeness of the theory which completely eludes our intuition. (805) 893-4111 by February 20, 2009.