Measurement and Instrumentation Unit 1-Standards and Instruments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Design Electricity Meters with Kinetis M Series Mcus FTF-SEG-F0469
Design Electricity Meters with Kinetis M Series MCUs FTF-SEG-F0469 Felix Wang | Senior Global Product Manager Martin Mienkina | Senior Member of Technical Staff M A Y . 2 0 1 4 TM External Use Session Objectives • Understand electricity meter block diagram and major functionalities • Familiarize with Kinetis M series MCUs • Become familiar with Freescale electricity meter reference designs, HW/SW development tools and algorithms offering • Mastering MCU programming… Tutorial • Ideal Hilbert Transformer Kinetis M series products are designed for next-generation smart meter applications. The cost-effective Kinetis M series MCUs combine a sophisticated analog front end (AFE), hardware tamper detection and low-power operation to enable the design of secure, high-accuracy 1-, 2- and 3-phase electricity metering solutions. Freescale also provides proven 1-, 2-, and 3-phase hardware reference designs with complex metrology firmware satisfying 0.1% measurement accuracy and all ESD requirements. Traditional smart metering designs typically employ two chips to separate user billing software from the main application code, as required by WELMEC, OIML and other global standards. However, Kinetis M series MCUs handle this task with a single chip due to their on-chip memory protection unit, peripheral bridge, protected GPIO and DMA controller. To guard against external tampering, M series MCUs include active and passive tamper pins with automatic time stamping throughout, including on the independent real-time clock (iRTC). In addition, a random number -
Smart Metering for Smart Electricity Consumption
Master Thesis Electrical Engineering May 2013 Smart Metering for Smart Electricity Consumption Praveen Vadda Sreerama Murthy Seelam School of Computing, Blekinge Institute of Technology, 37179 Karlskrona, Sweden i This thesis is submitted to the School of Computing at Blekinge Institute of Technology in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering. The thesis is equivalent to 20 weeks of full time studies. Contact Information: Authors: Praveen Vadda Address: Karlskrona, Sweden E-mail: [email protected] Sreerama Murthy Seelam Address: Karlskrona, Sweden E-mail: [email protected] University advisor: Prof. Markus Fiedler School of Computing (COM) School of Computing Internet : www.bth.se/com Blekinge Institute of Technology Phone : +46 455 38 50 00 371 79 Karlskrona Fax : +46 455 38 50 57 Sweden ii ABSTRACT In recent years, the demand for electricity has increased in households with the use of different appliances. This raises a concern to many developed and developing nations with the demand in immediate increase of electricity. There is a need for consumers or people to track their daily power usage in houses. In Sweden, scarcity of energy resources is faced during the day. So, the responsibility of human to save and control these resources is also important. This research work focuses on a Smart Metering data for distributing the electricity smartly and efficiently to the consumers. The main drawback of previously used traditional meters is that they do not provide information to the consumers, which is accomplished with the help of Smart Meter. A Smart Meter helps consumer to know the information of consumption of electricity for appliances in their respective houses. -
The Absolute Measurement of Capacity
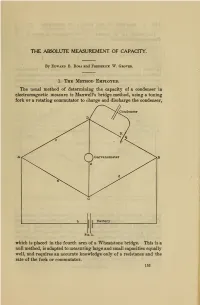
THE ABSOLUTE MEASUREMENT OF CAPACITY. By Edwakd B. Rosa and Frederick "W. Grover. 1. The Method Employed. The usual method of determining the capacity of a condenser in electromagnetic measure is Maxwell's bridge method, using a tuning fork or a rotating commutator to charge and discharge the condenser, Fig. 1. which is placed in the fourth arm of a Wheatstone bridge. This is a null method, is adapted to measuring large and small capacities equally well, and requires an accurate knowledge only of a resistance and the rate of the fork or commutator. 153 154 BULLETIN OF THE BUREAU OF STANDARDS. [vol.1, no. 2. The formula for the capacity C of the condenser as given by J. J Thomson, is as follows: * i_L a (a+h+d){a+c+g) 0= (1) ncd \} +c{a+l+d))\} + d(a+c+g)) in which <z, c, and d are the resistances of three arms of a Wheatstone bridge, b and g are battery and galvanometer resistances, respectively, and n is the number of times the condenser is charged and discharged per second. When the vibrating arm P touches Q the condenser is charged, and when it touches P it is short circuited and discharged. When Pis not touching Q the arm BD of the bridge is interrupted and a current flows from D to C through the galvanometer; when P touches Q the condenser is charged by a current coming partly through c and partly through g from C to D. Thus the current through the galvanometer is alternately in opposite directions, and when these opposing currents balance each other there is no deflection of the gal- vanometer. -

RX210 Single-Phase Two-Wire Electricity Power Meter
APPLICATION NOTE R01AN1212EU0101 RX210 Rev.1.01 Single-phase Two-wire Electricity Power Meter Dec 03, 2012 Introduction This document provides a guide to designing Electricity Meters with Renesas 32-Bit RX210 microcontrollers. Typical electricity meter designs today use at least one microcontroller an external analog front end (AFE). The role of the AFE is to provide accurate voltage and current measurement data to the metrology computation engine implemented some times in the AFE itself or in the microcontroller firmware. Depending on the accuracy requirements mandated by industry standards and local authorities, additional signal processing tasks such as: phase and temperature compensation, noise reduction through digital filtering and harmonic analysis may be required. Beyond the basic metrology functions smart electricity meters have to be able to calculate and track energy consumption profiles and support automatic meter reading (AMR) through various communication infrastructure such as wireless or power line (PLC) etc. All these additional functions require more computational resources often provided by additional microcontrollers (MCUs) or digital program processors (DSPs). Depending on the features and performance of the MCU’s a high level of integration that can be achieved at greatly reduced cost by reducing the number of components used, design cycle and system complexity. Integrating the AFE function with the computation engine can furthermore reduce the total system cost. Targeting smart meter applications with high levels of integration this application note will explore the capabilities of the Renesas RX210 Group. Smart electricity meters are becoming the standard in many developed countries around the world due to the new demands in accurate energy consumption monitoring, reporting and billing. -
An Analysis of Inertial Seisometer-Galvanometer
NBSIR 76-1089 An Analysis of Inertial Seisdmeter-Galvanorneter Combinations D. P. Johnson and H. Matheson Mechanics Division Institute for Basic Standards National Bureau of Standards Washington, D. C. 20234 June 1976 Final U. S. DEPARTMENT OF COMMERCE NATIONAL BUREAU Of STANDARDS • TABLE OF CONTENTS Page SECTION 1 INTRODUCTION ^ 1 . 1 Background 1.2 Scope ^ 1.3 Introductory Details 2 ELECTROMAGNETIC SECTION 2 GENERAL EQUATIONS OF MOTION OF AN INERTIAL SEISMOMETER 3 2.1 Dynaniical Theory 2 2.1.1 Mechanics ^ 2.1.2 Electrodynamics 5 2.2 Choice of Coordinates ^ 2.2.1 The Coordinate of Earth Motion 7 2.2.2 The Coordinate of Bob Motion 7 2.2.3 The Electrical Coordinate 7 2.2.4 The Magnetic Coordinate 3 2.3 Condition of Constraint: Riagnet 3 2.4 The Lagrangian Function • 2.4.1 Mechanical Kinetic Energy 10 2.4.2 Electrokinetic and Electro- potential Energy H 2.4.3 Gravitational Potential Energy 12 2.4.4 Mechanical Potential Energy 13 2.5 Tne General Equations of Motion i4 2.6 The Linearized Equations of Motion 2.7 Philosophical Notes and Interpretations 18 2.8 Extension to Two Coil Systems 18 2.8.1 General 2.8.2 Equations of Motion -^9 2.8.3 Reciprocity Calibration Using the Basic Instrument 21 2.8.4 Reciprocity Calibration Using Auxiliary Calibrating Coils . 23 2.9 Application to Other Electromagnetic Transducers - SECTION 3 RESPONSE CFARACTERISTICS OF A SEISMOMETER WITH A- RESISTIVE LOAD 3.1 Introduction 3.2 Seismometer with Resistive Load II TABLE GF CONTENTS Page 3.2.1 Steady State Response 27 3. -

Electrical & Electronics Measurement Laboratory Manual
DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT Electrical & Electronics Measurement Laboratory Manual By Dr. Madhab Chandra Tripathy Assistant Professor DEPARTMENT OF INSTRUMENTAION AND ELECTRONICS ENGINEERING COLLEGE OF ENGINEERING AND TECHNOLOGY BHUBANESWAR-751003 PAGE 1 | EXPT - 1 ELECTRICAL &ELECTRONICS MEASUREMENT LAB DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT List of Experiments PCEE7204 Electrical and Electronics Measurement Lab Select any 8 experiments from the list of 10 experiments 1. Measurement of Low Resistance by Kelvin’s Double Bridge Method. 2. Measurement of Self Inductance and Capacitance using Bridges. 3. Study of Galvanometer and Determination of Sensitivity and Galvanometer Constants. 4. Calibration of Voltmeters and Ammeters using Potentiometers. 5. Testing of Energy meters (Single phase type). 6. Measurement of Iron Loss from B-H Curve by using CRO. 7. Measurement of R, L, and C using Q-meter. 8. Measurement of Power in a single phase circuit by using CTs and PTs. 9. Measurement of Power and Power Factor in a three phase AC circuit by two-wattmeter method. 10. Study of Spectrum Analyzers. PAGE 2 | EXPT - 1 ELECTRICAL &ELECTRONICS MEASUREMENT LAB DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT DO’S AND DON’TS IN THE LAB DO’S:- 1. Students should carry observation notes and records completed in all aspects. 2. Correct specifications of the equipment have to be mentioned in the circuit diagram. 3. Students should be aware of the operation of equipments. 4. Students should take care of the laboratory equipments/ Instruments. 5. After completing the connections, students should get the circuits verified by the Lab Instructor. -
Manual S/N Prefix 11
HP Archive This vintage Hewlett Packard document was preserved and distributed by www. hparchive.com Please visit us on the web ! On-line curator: Glenn Robb This document is for FREE distribution only! OPERATING AND SERVICING MANUAL FOR MODEL 475B TUNABLE BOLOMETER MOUNT Serial 11 and Above Copyright 1956 by Hewlett-Packard Company The information contained in this booklet is intended for the operation and main· tenance oC Hewlett-Packard equipment and is not to be used otherwise or reproduced without the written consent of the Hewlett Packard Company. HEWLETT-PACKARD COMPANY 275 PAGE MILL ROAD, PALO ALTO, CALIFORNIA, U. S. A. 475BOOl-1 SPECIFICATIONS FREQUENCY RANGE: Approximately 1000 - 4000 MC (varies with SWR and phase of source and value of bolometer load.) POWER RANGE: 0.1 to 10 milliwatts (with -hp- Model 430C Microwave Power Meter.) FITTINGS: Input Connector - Type N female (UG 23/U). Output Connector (bolometer dc connec tion) - Type BNC (UG 89/U). Type N Male Connector (UG 21/U) sup plied to replace bolometer connector so that mount may be used as a conven tional double -stub transformer. POWER SENSITIVE ELEMENT: Selected 1/100 ampere instrument fuse. Sperry 821 or Narda N821 Barretter. Western Electric Type D166382 Ther mistor. OVERALL DIMENSIONS: 1811 long x 7-3/8" wide x 3-5/811 deep. WEIGHT: 8 pounds. ...... ...... Pl ::l P. Pl 0-' o <: Cil >+> -J lJ1 lJj o o ...... ......I • OPERATING INSTRUC TIONS INSPECTION This instrument has been thoroughly tested and inspected before being shipped and is ready for use when received. After the instrument is unpacked, it should be carefully inspected for any damage received in transit. -

(Ohmmeter). Aims: • Calibrating of a Sensitive Galvanometer for Measuring a Resistance
Exp ( ) Calibrating of a sensitive galvanometer for measuring a resistance (Ohmmeter). Aims: • Calibrating of a sensitive galvanometer for measuring a resistance. The theory When a galvanometer is used as an ohmmeter for measuring an ohmic resistance R, the deviation angle θ of the galvanometer’s coil is directly proportional to the flowing current through the coil and inversely proportional to the value of the resistance. The deviation will reach to the maximum end when the resistance equals to zero or the current has the maximum value. For this reason, the scale will be divide by inversely way in comparison with the ammeter and the voltmeter. The original circuit as shown in Fig(1) consists of a dry cell(E) , rheostat and ammeter (A) are connected in series with small resistor s has the range of 1 omega. The two terminals of “s” are connected in parallel to another combination includes a sensitive galvanometer “G” which has internal resistance “r” and a resistors box “R”, this combination is called the measuring circuit. When the value of R equals zero, and by moving the rheostat in the original circuit, it is possible to set the flowing electric current in measuring the circuit as a maximum value od deviation in the galvanometer. By assigning different values of R, the deviation θ is decreasing with increasing the value of R or by another meaning when the flowing current through the galvanometer decreases. Therefore, the current through the galvanometer is inversely proportional to the value of R according the following Figure 1: Ohmmeter Circuit diagram equation; V=I(R+r) R=V/I-r or R=V/θ-r 1 | P a g e This is a straight-line equation between R and (1/θ) as shown in Fig(2). -

Ballastic Galvanometer This Is a Sophisticated Instrument. This
Ballastic galvanometer This is a sophisticated instrument. This works on the principle of PMMC meter. The only difference is the type of suspension is used for this meter. Lamp and glass scale method is used to obtain the deflection. A small mirror is attached to the moving system. Phosphorous bronze wire is used for suspension. When the D.C. voltage is applied to the terminals of moving coil, current flows through it. When a current carrying coil kept in the magnetic field, produced by permanent magnet, it experiences a force. The coil deflects and mirror deflects. The light spot on the glass scale also move. This deflection is proportional to the current through the coil. Q i = , Q = it = idt t Q , deflection Charge Fig 2.27 Ballastic galvanometer Measurements of flux and flux density (Method of reversal) D.C. voltage is applied to the electromagnet through a variable resistance R1 and a reversing switch. The voltage applied to the toroid can be reversed by changing the switch from position 2 to position ‘1’. Let the switch be in position ‘2’ initially. A constant current flows through the toroid and a constant flux is established in the core of the magnet. A search coil of few turns is provided on the toroid. The B.G. is connected to the search coil through a current limiting resistance. When it is required to measure the flux, the switch is changed from position ‘2’ to position ‘1’. Hence the flux reduced to zero and it starts increasing in the reverse direction. The flux goes from + to - , in time ‘t’ second. -

802314-3) Laboratory Manual (Fall 2016: Term 1, 1437/1438H
اﳌﻤﻠﻜﺔ اﻟﻌﺮﺑﻴﺔ اﻟﺴﻌﻮدﻳﺔ KINGDOM OF SAUDI ARABIA Ministry of Higher Education وزارة اﻟﺘﻌﻠﻴﻢ اﻟﻌﺎﱄ - ﺟﺎﻣﻌﺔ أم اﻟﻘﺮى Umm Al-Qura University ﻛﻠﻴﺔ اﳍﻨﺪﺳﺔ و اﻟﻌﻤﺎرة اﻹﺳﻼﻣﻴﺔ College of Engineering and Islamic Architecture ﻗﺴﻢ اﳍﻨﺪﺳﺔ اﻟﻜﻬﺮ?ﺋﻴﺔ Electrical Engineering Department ELECTRICAL AND ELECTRONIC MEASUREMENTS (802314-3) Laboratory Manual (Fall 2016: Term 1, 1437/1438H) Prepared by: Dr. Makbul Anwari Approved by: Control Sequence Committee Table of Contents Page 1. Introduction 3 2. Laboratory Safety 3 3. Lab Report 5 4. Experiment # 1: 6 5. Experiment # 2: 11 6. Experiment # 3: 19 7. Experiment # 4: 25 8. Experiment # 5: 29 2 Introduction This manual has been prepared for use in the course 802314-3, Electrical and Electronic Measurements. The laboratory exercises are devised is such a way as to reinforce the concepts taught in the lectures. Before performing the experiments the student must be aware of the basic laboratory safety rules for minimizing any potential dangers. The students must complete and submit the pre-lab report of each exercise before performing the experiment. The objective of the experiment must be kept in mind throughout the lab experiment. Laboratory Safety: ∑ Safety in the electrical engineering laboratory, as everywhere else, is a matter of the knowledge of potential hazards, following safety regulations and precautions, and common sense. ∑ Observing safety precautions is important due to pronounced hazards in any electrical engineering laboratory. ∑ All the UQU Electrical Engineering Students, Teaching Assistants, Lab Engineers, and Lab technicians are required to be familiar with the LABORATORY SAFETY GUIDELINES FOR THE UQU ELECTRICAL ENGINEERING UNDERGRADUATE LAB AREAS published on the department web-page. -

A Low Cost Watt-Hour Energy Meter Based on the ADE7757 (AN-679)
AN-679 APPLICATION NOTE One Technology Way • P.O. Box 9106 • Norwood, MA 02062-9106 • Tel: 781/329-4700•Fax: 781/326-8703 •www.analog.com A Low Cost Watt-Hour Energy Meter Based on the ADE7757 by Stephen T. English INTRODUCTION The ADE7757 board design greatly exceeds this basic This application note describes a high accuracy, low specifi cation for many of the accuracy requirements, cost, single-phase power meter based on the ADE7757. e.g., accuracy at unity power factor and at a low power The meter is designed for use in single-phase, 2-wire factor (PF = ±0.5). In addition, the dynamic range per- distribution systems. The design can be adapted to suit formance of the meter has been extended to 400. The specifi c regional requirements, e.g., in the U.S., power is IEC 61036 standard specifi es accuracy over a range of usually distributed for residential customers as single- 5% Ib to IMAX (see Table I). Typical values for IMAX are phase, 3-wire. 400% to 600% of Ib. The ADE7757 is a low cost, single-chip solution for Table I. Accuracy Requirements electrical energy measurement. The ADE7757 is a highly integrated system comprised of two ADCs, a reference Percentage Error Limits3 circuit, and a fi xed DSP function for the calculation of Current Value1 PF2 Class 1 Class 2 real power. A highly stable oscillator is integrated into 0.05 lb < I < 0.1 lb 1 ±1.5% ±2.5% the design to provide the necessary clock for the IC. The 0.1 lb < I < IMAX 1 ±1.0% ±2.0% ADE7757 includes direct drive capability for electrome- 0.1 lb < I < 0.2 lb 0.5 Lag ±1.5% ±2.5% chanical counters and a high frequency pulse output for 0.8 Lead ±1.5% both calibration and system communication. -
Electrical Multimeter Instruction Sheet Safety Information a Warning Statement Identifies Hazardous Conditions and Actions That Could Cause Bodily Harm Or Death
Model 113 English Instruction Sheet Page 1 ® 113 Electrical Multimeter Instruction Sheet Safety Information A Warning statement identifies hazardous conditions and actions that could cause bodily harm or death. A Caution statement identifies conditions and actions that could damage the Meter or the equipment under test. To avoid possible electric shock or personal injury, follow these guidelines: • Use the Meter only as specified in this instruction sheet or the protection provided by the Meter might be impaired. • Do not use the Meter or test leads if they appear damaged, or if the Meter is not operating properly. • Always use proper terminals, switch position, and range for measurements. • Verify the Meter's operation by measuring a known voltage. If in doubt, have the Meter serviced. • Do not apply more than the rated voltage, as marked on Meter, between terminals or between any terminal and earth ground. • Use caution with voltages above 30 V ac rms, 42 V ac peak, or 60 V dc. These voltages pose a shock hazard. • Disconnect circuit power and discharge all high-voltage capacitors before testing resistance, continuity, diodes, or capacitance. PN 3083192 December 2007 ©2007 Fluke Corporation. All rights reserved. Specifications subject to change without notice. Printed in China Model 113 English Instruction Sheet Page 2 • Do not use the Meter around explosive gas, vapor or in wet environments. • When using test leads or probes, keep your fingers behind the finger guards. • Only use test leads that have the same voltage, category, and amperage ratings as the meter and that have been approved by a safety agency.