Imx6 Solox Working with Cortex-M4
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CST8207 – Linux O/S I
Mounting a Filesystem Directory Structure Fstab Mount command CST8207 - Algonquin College 2 Chapter 12: page 467 - 496 CST8207 - Algonquin College 3 The mount utility connects filesystems to the Linux directory hierarchy. The mount point is a directory in the local filesystem where you can access mounted filesystem. This directory must exist before you can mount a filesystem. All filesystems visible on the system exist as a mounted filesystem someplace below the root (/) directory CST8207 - Algonquin College 4 can be mounted manually ◦ can be listed in /etc/fstab, but not necessary ◦ all mounting information supplied manually at command line by user or administrator can be mounted automatically on startup ◦ must be listed /etc/fstab, with all appropriate information and options required Every filesystem, drive, storage device is listed as a mounted filesystem associated to a directory someplace under the root (/) directory CST8207 - Algonquin College 5 CST8207 - Algonquin College 6 Benefits Scalable ◦ As new drives are added and new partitions are created, further filesystems can be mounted at various mount points as required. ◦ This means a Linux system does not need to worry about running out of disk space. Transparent ◦ No application would stop working if transferred to a different partition, because access to data is done via the mount point. ◦ Also transparent to user CST8207 - Algonquin College 7 All known filesystems volumes are typically listed in the /etc/fstab (static information about filesystem) file to help automate the mounting process If it is not listed in the /etc/fstab file, then all appropriate information about the filesystem needs to be listed manually at the command line. -

File System, Files, and *Tab /Etc/Fstab
File system, files, and *tab File system files directories volumes, file systems mounting points local versus networked file systems 1 /etc/fstab Specifies what is to be mounted where and how fs_spec: describes block special device for remote filesystem to be mounted fs_file: describes the mount point fs_vfstype: describes the type of file system fs_mntops: describes the mount options associated with the filesystem 2 /etc/fstab cont. fs_freq: used by the dump command fs_passno: used by fsck to determine the order in which checks are done at boot time. Root file systems should be specified as 1, others should be 2. Value 0 means that file system does not need to be checked 3 /etc/fstab 4 from blocks to mounting points metadata inodes directories superblocks 5 mounting file systems mounting e.g., mount -a unmounting manually or during shutdown umount 6 /etc/mtab see what is mounted 7 Network File System Access file system (FS) over a network looks like a local file system to user e.g. mount user FS rather than duplicating it (which would be a disaster) Developed by Sun Microsystems (mid 80s) history for NFS: NFS, NFSv2, NFSv3, NFSv4 RFC 3530 (from 2003) take a look to see what these RFCs are like!) 8 Network File System How does this actually work? server needs to export the system client needs to mount the system server: /etc/exports file client: /etc/fstab file 9 Network File System Security concerns UID GID What problems could arise? 10 Network File System example from our raid system (what is a RAID again?) Example of exports file from -

Powerview Command Reference
PowerView Command Reference TRACE32 Online Help TRACE32 Directory TRACE32 Index TRACE32 Documents ...................................................................................................................... PowerView User Interface ............................................................................................................ PowerView Command Reference .............................................................................................1 History ...................................................................................................................................... 12 ABORT ...................................................................................................................................... 13 ABORT Abort driver program 13 AREA ........................................................................................................................................ 14 AREA Message windows 14 AREA.CLEAR Clear area 15 AREA.CLOSE Close output file 15 AREA.Create Create or modify message area 16 AREA.Delete Delete message area 17 AREA.List Display a detailed list off all message areas 18 AREA.OPEN Open output file 20 AREA.PIPE Redirect area to stdout 21 AREA.RESet Reset areas 21 AREA.SAVE Save AREA window contents to file 21 AREA.Select Select area 22 AREA.STDERR Redirect area to stderr 23 AREA.STDOUT Redirect area to stdout 23 AREA.view Display message area in AREA window 24 AutoSTOre .............................................................................................................................. -
Filesystem Considerations for Embedded Devices ELC2015 03/25/15
Filesystem considerations for embedded devices ELC2015 03/25/15 Tristan Lelong Senior embedded software engineer Filesystem considerations ABSTRACT The goal of this presentation is to answer a question asked by several customers: which filesystem should you use within your embedded design’s eMMC/SDCard? These storage devices use a standard block interface, compatible with traditional filesystems, but constraints are not those of desktop PC environments. EXT2/3/4, BTRFS, F2FS are the first of many solutions which come to mind, but how do they all compare? Typical queries include performance, longevity, tools availability, support, and power loss robustness. This presentation will not dive into implementation details but will instead summarize provided answers with the help of various figures and meaningful test results. 2 TABLE OF CONTENTS 1. Introduction 2. Block devices 3. Available filesystems 4. Performances 5. Tools 6. Reliability 7. Conclusion Filesystem considerations ABOUT THE AUTHOR • Tristan Lelong • Embedded software engineer @ Adeneo Embedded • French, living in the Pacific northwest • Embedded software, free software, and Linux kernel enthusiast. 4 Introduction Filesystem considerations Introduction INTRODUCTION More and more embedded designs rely on smart memory chips rather than bare NAND or NOR. This presentation will start by describing: • Some context to help understand the differences between NAND and MMC • Some typical requirements found in embedded devices designs • Potential filesystems to use on MMC devices 6 Filesystem considerations Introduction INTRODUCTION Focus will then move to block filesystems. How they are supported, what feature do they advertise. To help understand how they compare, we will present some benchmarks and comparisons regarding: • Tools • Reliability • Performances 7 Block devices Filesystem considerations Block devices MMC, EMMC, SD CARD Vocabulary: • MMC: MultiMediaCard is a memory card unveiled in 1997 by SanDisk and Siemens based on NAND flash memory. -

Lab Intro to Console Commands
New Lab Intro to KDE Terminal Konsole After completing this lab activity the student will be able to; Access the KDE Terminal Konsole and enter basic commands. Enter commands using a typical command line interface (CLI). Explain the use of the following commands, ls, ls –al, dir, mkdir, whoami, Explain the directory structure of a typical user. This lab activity will introduce you to one of the many command line interfaces available in Linux/UNIX operating systems and a few of the most basic commands. The command line interface you will be using for this lab activity is the console called the Konsole and is also referred to as Terminal. Note: As you notice, in the KDE system many features are written with the capital letter “K” in place of the first letter or the utility to reflect the fact it was modified for the KDE system. The original UNIX system did not use a graphical user interface GUI but rather was a command line interface (CLI) similar to the command prompt in Windows operating systems. The command line interface is referred to as a shell. Even today the command line interface (the shell) is used to issue commands on a Linux server to minimize system resources. For example, there is no need to start the GUI on the server to add a new user to an existing system. Starting the GUI will reduce the system performance because it requires RAM to run the GUI. A GUI will affect the overall performance of the server when it is supporting many users (clients). -

Mv-Ch650-90Tm
MV-CH650-90TM 65 MP CMOS 10 GigE Area Scan Camera Introduction Available Model MV-CH650-90TM camera adopts Gpixel GMAX3265 sensor to M58-mount with fan, mono: MV-CH650- provide high-quality image. It uses 10 GigE interface to transmit 90TM-M58S-NF non-compressed image in real time, and its max. frame rate can F-mount with fan, mono: MV-CH650-90TM- reach 15.5 fps in full resolution. F-NF Key Feature Applicable Industry Resolution of 9344 × 7000, and pixel size of 3.2 μm × 3.2 μm. PCB AOI, FPD, railway related applications, etc. Adopts 10 GigE interface providing max. transmission Sensor Quantum Efficiency distance of 100 meters without relay. Supports auto or manual adjustment for gain, exposure time, and manual adjustment for Look-Up Table (LUT), Gamma correction, etc. Compatible with GigE Vision Protocol V2.0, GenlCam Standard, and third-party software based on protocols. Dimension M58-mount with fan: F-mount with fan: Specification Model MV-CH650-90TM Camera Sensor type CMOS, global shutter Sensor model Gpixel GMAX3265 Pixel size 3.2 µm × 3.2 µm Sensor size 29.9 mm × 22.4 mm Resolution 9344 × 7000 Max. frame rate 15.5 fps @9344 × 7000 Dynamic range 66 dB SNR 40 dB Gain 1.25X to 6X Exposure time 15 μs to 10 sec Exposure mode Off/Once/Continuous exposure mode Mono/color Mono Pixel format Mono 8/10/10p/12/12p Binning Supports 1 × 1, 1 × 2, 1 × 4, 2 × 1, 2 × 2, 2 × 4, 4 × 1, 4 × 2, 4 × 4 Decimation Supports 1 × 1, 1 × 2, 1 × 4, 2 × 1, 2 × 2, 2 × 4, 4 × 1, 4 × 2, 4 × 4 Reverse image Supports horizontal and vertical reverse image output Electrical features Data interface 10 Gigabit Ethernet, compatible with Gigabit Ethernet Digital I/O 12-pin Hirose connector provides power and I/O, including opto-isolated input × 1 (Line 0), opto-isolated output × 1 (Line 1), bi-directional non-isolated I/O × 1 (Line 2), and RS-232 × 1 Power supply 9 VDC to 24 VDC Power consumption Typ. -
![How to Setup NFS File System Guide ID: 3 - Release: Initial Revision [Major] 2015-08-14](https://docslib.b-cdn.net/cover/5995/how-to-setup-nfs-file-system-guide-id-3-release-initial-revision-major-2015-08-14-825995.webp)
How to Setup NFS File System Guide ID: 3 - Release: Initial Revision [Major] 2015-08-14
How to setup NFS file system Guide ID: 3 - Release: Initial revision [major] 2015-08-14 How to setup NFS file system Configuration of SCO Unix shared drive in order to share printer tasks. Written By: Petr Roupec This document was generated on 2020-11-19 05:38:51 AM (MST). © 2020 omlex.dozuki.com/ Page 1 of 7 How to setup NFS file system Guide ID: 3 - Release: Initial revision [major] 2015-08-14 INTRODUCTION This guide is describing use of SCO scoadmin program to setup mount /volumes/bmprint remote drive on your OT computer. This document was generated on 2020-11-19 05:38:51 AM (MST). © 2020 omlex.dozuki.com/ Page 2 of 7 How to setup NFS file system Guide ID: 3 - Release: Initial revision [major] 2015-08-14 Step 1 — SCO Admin - Starting program Switch user on local console. Please note character "-" on command line - this load right environment for root user From remote computer use telnet connection Start scoadmin program This document was generated on 2020-11-19 05:38:51 AM (MST). © 2020 omlex.dozuki.com/ Page 3 of 7 How to setup NFS file system Guide ID: 3 - Release: Initial revision [major] 2015-08-14 Step 2 — SCO Admin - File System Manager SCO Admin - File Manager Select FileSystems Open Filesystem Manager Use TAB and arrows on your keyboard to move between the fields This document was generated on 2020-11-19 05:38:51 AM (MST). © 2020 omlex.dozuki.com/ Page 4 of 7 How to setup NFS file system Guide ID: 3 - Release: Initial revision [major] 2015-08-14 Step 3 — Start NFS file system mounting wizard Select Mount from menu Scroll down and select "Add Mount Configuration" Choose remote Use TAB and arrows on your keyboard to move between the fields Step 4 — NFS Share - Configuration details Enter IP address of your printer server Enter name of remote directory of your print server Enter name of local directory on computer you are configuring Don't forget Advanced Mount Option - Failure to configure these correctly might stop your server in case of printer server shutdown This document was generated on 2020-11-19 05:38:51 AM (MST). -

UNIX (Solaris/Linux) Quick Reference Card Logging in Directory Commands at the Login: Prompt, Enter Your Username
UNIX (Solaris/Linux) QUICK REFERENCE CARD Logging In Directory Commands At the Login: prompt, enter your username. At the Password: prompt, enter ls Lists files in current directory your system password. Linux is case-sensitive, so enter upper and lower case ls -l Long listing of files letters as required for your username, password and commands. ls -a List all files, including hidden files ls -lat Long listing of all files sorted by last Exiting or Logging Out modification time. ls wcp List all files matching the wildcard Enter logout and press <Enter> or type <Ctrl>-D. pattern Changing your Password ls dn List files in the directory dn tree List files in tree format Type passwd at the command prompt. Type in your old password, then your new cd dn Change current directory to dn password, then re-enter your new password for verification. If the new password cd pub Changes to subdirectory “pub” is verified, your password will be changed. Many systems age passwords; this cd .. Changes to next higher level directory forces users to change their passwords at predetermined intervals. (previous directory) cd / Changes to the root directory Changing your MS Network Password cd Changes to the users home directory cd /usr/xx Changes to the subdirectory “xx” in the Some servers maintain a second password exclusively for use with Microsoft windows directory “usr” networking, allowing you to mount your home directory as a Network Drive. mkdir dn Makes a new directory named dn Type smbpasswd at the command prompt. Type in your old SMB passwword, rmdir dn Removes the directory dn (the then your new password, then re-enter your new password for verification. -
TS ODBC Dataserver Quick Start
TS ODBC DataServerTM Quick Start Multiple-Tier Introduction This Multiple-Tier product includes 3 components. Follow the instructions below for each Windows workstation and DataServer Host component. Multiple-Tier components can be found by platform in a folder on the TS ODBC DataServer CD-ROM. Use these instructions for the TS ODBC Gateway for Windows version of the Multiple-Tier software. TS ODBC DataServer Server UNIX Server Install the Server on your UNIX Host system from cpio distribution media. This installation is required only once no matter how many workstations are connected. Logon as root. 1. Create and change (cd) to a base directory for the TS ODBC DataServer (For example, /usr/local/tsodbc). 2. Copy the distribution media to the system using cpio. (See Mounting UNIX CD-ROM devices on the reverse.) This example is for Linux (kernel 2.6.16+). Substitute the appropriate values for your environment. umask 0 cpio -icvBmud </mountpoint/linux2616/tsod_srv/tsod (for Linux use –ivBmud above) 3. Execute the install script. ./install 4. Activate the server (Refer to the Installation and Activation Guide). Windows Server Before continuing, review the updated installation instructions provided in the installation manual. NOTE: All Thoroughbred Windows based products prior to Version 8.7.0 must first be uninstalled and then the 8.7.1 release installed. Only 8.7.0 can be upgraded to 8.7.1 and only 8.7.0 and 8.7.1 can co-exist on the same system. If you are upgrading a pre 8.7.0 release, BEFORE continuing with this installation, please see the TS ODBC Installation and Activation Guide for complete instructions to properly prepare your system for 8.7.1. -
UEFI Shell Specification
UEFI Shell Specification January 26, 2016 Revision 2.2 The material contained herein is not a license, either expressly or impliedly, to any intellectual property owned or controlled by any of the authors or developers of this material or to any contribution thereto. The material contained herein is provided on an "AS IS" basis and, to the maximum extent permitted by applicable law, this information is provided AS IS AND WITH ALL FAULTS, and the authors and developers of this material hereby disclaim all other warranties and conditions, either express, implied or statutory, including, but not limited to, any (if any) implied warranties, duties or conditions of merchantability, of fitness for a particular purpose, of accuracy or completeness of responses, of results, of workmanlike effort, of lack of viruses and of lack of negligence, all with regard to this material and any contribution thereto. Designers must not rely on the absence or characteristics of any features or instructions marked "reserved" or "undefined." The Unified EFI Forum, Inc. reserves any features or instructions so marked for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. ALSO, THERE IS NO WARRANTY OR CONDITION OF TITLE, QUIET ENJOYMENT, QUIET POSSESSION, CORRESPONDENCE TO DESCRIPTION OR NON-INFRINGEMENT WITH REGARD TO THE SPECIFICATION AND ANY CONTRIBUTION THERETO. IN NO EVENT WILL ANY AUTHOR OR DEVELOPER OF THIS MATERIAL OR ANY CONTRIBUTION THERETO BE LIABLE TO ANY OTHER PARTY FOR THE COST OF PROCURING SUBSTITUTE GOODS OR SERVICES, LOST PROFITS, LOSS OF USE, LOSS OF DATA, OR ANY INCIDENTAL, CONSEQUENTIAL, DIRECT, INDIRECT, OR SPECIAL DAMAGES WHETHER UNDER CONTRACT, TORT, WARRANTY, OR OTHERWISE, ARISING IN ANY WAY OUT OF THIS OR ANY OTHER AGREEMENT RELATING TO THIS DOCUMENT, WHETHER OR NOT SUCH PARTY HAD ADVANCE NOTICE OF THE POSSIBILITY OF SUCH DAMAGES. -

Linux Networking 101
The Gorilla ® Guide to… Linux Networking 101 Inside this Guide: • Discover how Linux continues its march toward world domination • Learn basic Linux administration tips • See how easy it can be to build your entire network on a Linux foundation • Find out how Cumulus Linux is your ticket to networking freedom David M. Davis ActualTech Media Helping You Navigate The Technology Jungle! In Partnership With www.actualtechmedia.com The Gorilla Guide To… Linux Networking 101 Author David M. Davis, ActualTech Media Editors Hilary Kirchner, Dream Write Creative, LLC Christina Guthrie, Guthrie Writing & Editorial, LLC Madison Emery, Cumulus Networks Layout and Design Scott D. Lowe, ActualTech Media Copyright © 2017 by ActualTech Media. All rights reserved. No portion of this book may be reproduced or used in any manner without the express written permission of the publisher except for the use of brief quotations. The information provided within this eBook is for general informational purposes only. While we try to keep the information up- to-date and correct, there are no representations or warranties, express or implied, about the completeness, accuracy, reliability, suitability or availability with respect to the information, products, services, or related graphics contained in this book for any purpose. Any use of this information is at your own risk. ActualTech Media Okatie Village Ste 103-157 Bluffton, SC 29909 www.actualtechmedia.com Entering the Jungle Introduction: Six Reasons You Need to Learn Linux ....................................................... 7 1. Linux is the future ........................................................................ 9 2. Linux is on everything .................................................................. 9 3. Linux is adaptable ....................................................................... 10 4. Linux has a strong community and ecosystem ........................... 10 5. -
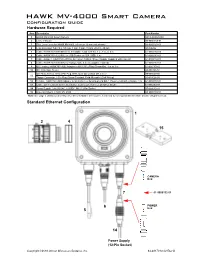
HAWK MV-4000 Configuration Guide Ethernet Configuration with Flying Leads
HAWK MV-4000 Smart Camera Configuration Guide Hardware Required Item Description Part Number 1 HAWK MV-4000 Smart Camera 8X1X-XXX0-010X 2 Lens, C-Mount 98-90001XX-01 3 IP67 Lens Cover for HAWK MV-4000, 50 mm or 70 mm (not shown) 98-900015X-01 4 Lens Extension Tube Set, 0.5 mm, 1 mm, 5 mm, 10 mm, 20 mm, 40 mm 98-CO206 5 Cable, HAWK MV-4000 Ethernet, X-CODE / RJ45 CAT 6A, 1 m, 3 m, or 5 m 61-9000134-0X 6 Cable, HAWK MV-4000 M12 to USB Socket or VGA / USB, 1 m 61-900014X-01 7 Cable, Adapter, HAWK MV-4000 to Accessory Cables / Power Supply (supplied with camera) 61-9000132-01 8 Cable, HAWK MV-4000 M12 to Flying Leads, 3 m (no adapter required) 61-9000151-01 9 QX Cordset, HAWK MV-4000 Adapter to QX-1 M12 Plug (Screw-On), 1 m or 3 m 61-0001XX-02 10 QX-1 Interface Device 98-000103-02 QX Photo Sensor, M12 4-Pin Plug, NPN, Dark On or Dark Off, 2 m or 99-000020-0X 11 Trigger Connector, 4-Pin Plug (Screw Terminal, Field-Wireable) (Self-Wiring) 20-610024-01 12 Y Cable, HAWK MV-4000 Adapter to Smart Series Illuminator and QX-1, Power or On/Off or Strobe, 1 m 61-900013X-01 13 Cable, QX-1 to Smart Series Illuminator, Continuous Power or On/Off or Strobe 61-0002XX-01 14 Power Supply, 100-240VAC, +24VDC, M12 12-Pin Socket 97-000012-01 15 Universal Mount, HAWK MV-4000 98-9000209-01 Note: See page 5 of this document for a full list of available accessories, numbered to correspond with this table and the diagrams below.