Algebras of Open Dynamical Systems on the Operad of Wiring Diagrams
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Introduction to Operad Theory
AN INTRODUCTION TO OPERAD THEORY SAIMA SAMCHUCK-SCHNARCH Abstract. We give an introduction to category theory and operad theory aimed at the undergraduate level. We first explore operads in the category of sets, and then generalize to other familiar categories. Finally, we develop tools to construct operads via generators and relations, and provide several examples of operads in various categories. Throughout, we highlight the ways in which operads can be seen to encode the properties of algebraic structures across different categories. Contents 1. Introduction1 2. Preliminary Definitions2 2.1. Algebraic Structures2 2.2. Category Theory4 3. Operads in the Category of Sets 12 3.1. Basic Definitions 13 3.2. Tree Diagram Visualizations 14 3.3. Morphisms and Algebras over Operads of Sets 17 4. General Operads 22 4.1. Basic Definitions 22 4.2. Morphisms and Algebras over General Operads 27 5. Operads via Generators and Relations 33 5.1. Quotient Operads and Free Operads 33 5.2. More Examples of Operads 38 5.3. Coloured Operads 43 References 44 1. Introduction Sets equipped with operations are ubiquitous in mathematics, and many familiar operati- ons share key properties. For instance, the addition of real numbers, composition of functions, and concatenation of strings are all associative operations with an identity element. In other words, all three are examples of monoids. Rather than working with particular examples of sets and operations directly, it is often more convenient to abstract out their common pro- perties and work with algebraic structures instead. For instance, one can prove that in any monoid, arbitrarily long products x1x2 ··· xn have an unambiguous value, and thus brackets 2010 Mathematics Subject Classification. -
![Arxiv:Math/0701299V1 [Math.QA] 10 Jan 2007 .Apiain:Tfs F,S N Oooyagba 11 Algebras Homotopy and Tqfts ST CFT, Tqfts, 9.1](https://docslib.b-cdn.net/cover/8194/arxiv-math-0701299v1-math-qa-10-jan-2007-apiain-tfs-f-s-n-oooyagba-11-algebras-homotopy-and-tqfts-st-cft-tqfts-9-1-358194.webp)
Arxiv:Math/0701299V1 [Math.QA] 10 Jan 2007 .Apiain:Tfs F,S N Oooyagba 11 Algebras Homotopy and Tqfts ST CFT, Tqfts, 9.1
FROM OPERADS AND PROPS TO FEYNMAN PROCESSES LUCIAN M. IONESCU Abstract. Operads and PROPs are presented, together with examples and applications to quantum physics suggesting the structure of Feynman categories/PROPs and the corre- sponding algebras. Contents 1. Introduction 2 2. PROPs 2 2.1. PROs 2 2.2. PROPs 3 2.3. The basic example 4 3. Operads 4 3.1. Restricting a PROP 4 3.2. The basic example 5 3.3. PROP generated by an operad 5 4. Representations of PROPs and operads 5 4.1. Morphisms of PROPs 5 4.2. Representations: algebras over a PROP 6 4.3. Morphisms of operads 6 5. Operations with PROPs and operads 6 5.1. Free operads 7 5.1.1. Trees and forests 7 5.1.2. Colored forests 8 5.2. Ideals and quotients 8 5.3. Duality and cooperads 8 6. Classical examples of operads 8 arXiv:math/0701299v1 [math.QA] 10 Jan 2007 6.1. The operad Assoc 8 6.2. The operad Comm 9 6.3. The operad Lie 9 6.4. The operad Poisson 9 7. Examples of PROPs 9 7.1. Feynman PROPs and Feynman categories 9 7.2. PROPs and “bi-operads” 10 8. Higher operads: homotopy algebras 10 9. Applications: TQFTs, CFT, ST and homotopy algebras 11 9.1. TQFTs 11 1 9.1.1. (1+1)-TQFTs 11 9.1.2. (0+1)-TQFTs 12 9.2. Conformal Field Theory 12 9.3. String Theory and Homotopy Lie Algebras 13 9.3.1. String backgrounds 13 9.3.2. -

Algebra + Homotopy = Operad
Symplectic, Poisson and Noncommutative Geometry MSRI Publications Volume 62, 2014 Algebra + homotopy = operad BRUNO VALLETTE “If I could only understand the beautiful consequences following from the concise proposition d 2 0.” —Henri Cartan D This survey provides an elementary introduction to operads and to their ap- plications in homotopical algebra. The aim is to explain how the notion of an operad was prompted by the necessity to have an algebraic object which encodes higher homotopies. We try to show how universal this theory is by giving many applications in algebra, geometry, topology, and mathematical physics. (This text is accessible to any student knowing what tensor products, chain complexes, and categories are.) Introduction 229 1. When algebra meets homotopy 230 2. Operads 239 3. Operadic syzygies 253 4. Homotopy transfer theorem 272 Conclusion 283 Acknowledgements 284 References 284 Introduction Galois explained to us that operations acting on the solutions of algebraic equa- tions are mathematical objects as well. The notion of an operad was created in order to have a well defined mathematical object which encodes “operations”. Its name is a portemanteau word, coming from the contraction of the words “operations” and “monad”, because an operad can be defined as a monad encoding operations. The introduction of this notion was prompted in the 60’s, by the necessity of working with higher operations made up of higher homotopies appearing in algebraic topology. Algebra is the study of algebraic structures with respect to isomorphisms. Given two isomorphic vector spaces and one algebra structure on one of them, 229 230 BRUNO VALLETTE one can always define, by means of transfer, an algebra structure on the other space such that these two algebra structures become isomorphic. -

Notes on the Lie Operad
Notes on the Lie Operad Todd H. Trimble Department of Mathematics University of Chicago These notes have been reLATEXed by Tim Hosgood, who takes responsibility for any errors. The purpose of these notes is to compare two distinct approaches to the Lie operad. The first approach closely follows work of Joyal [9], which gives a species-theoretic account of the relationship between the Lie operad and homol- ogy of partition lattices. The second approach is rooted in a paper of Ginzburg- Kapranov [7], which generalizes within the framework of operads a fundamental duality between commutative algebras and Lie algebras. Both approaches in- volve a bar resolution for operads, but in different ways: we explain the sense in which Joyal's approach involves a \right" resolution and the Ginzburg-Kapranov approach a \left" resolution. This observation is exploited to yield a precise com- parison in the form of a chain map which induces an isomorphism in homology, between the two approaches. 1 Categorical Generalities Let FB denote the category of finite sets and bijections. FB is equivalent to the permutation category P, whose objects are natural numbers and whose set of P morphisms is the disjoint union Sn of all finite symmetric groups. P (and n>0 therefore also FB) satisfies the following universal property: given a symmetric monoidal category C and an object A of C, there exists a symmetric monoidal functor P !C which sends the object 1 of P to A and this functor is unique up to a unique monoidal isomorphism. (Cf. the corresponding property for the braid category in [11].) Let V be a symmetric monoidal closed category, with monoidal product ⊕ and unit 1. -

Tom Leinster
Theory and Applications of Categories, Vol. 12, No. 3, 2004, pp. 73–194. OPERADS IN HIGHER-DIMENSIONAL CATEGORY THEORY TOM LEINSTER ABSTRACT. The purpose of this paper is to set up a theory of generalized operads and multicategories and to use it as a language in which to propose a definition of weak n-category. Included is a full explanation of why the proposed definition of n- category is a reasonable one, and of what happens when n ≤ 2. Generalized operads and multicategories play other parts in higher-dimensional algebra too, some of which are outlined here: for instance, they can be used to simplify the opetopic approach to n-categories expounded by Baez, Dolan and others, and are a natural language in which to discuss enrichment of categorical structures. Contents Introduction 73 1 Bicategories 77 2 Operads and multicategories 88 3 More on operads and multicategories 107 4 A definition of weak ω-category 138 A Biased vs. unbiased bicategories 166 B The free multicategory construction 177 C Strict ω-categories 180 D Existence of initial operad-with-contraction 189 References 192 Introduction This paper concerns various aspects of higher-dimensional category theory, and in partic- ular n-categories and generalized operads. We start with a look at bicategories (Section 1). Having reviewed the basics of the classical definition, we define ‘unbiased bicategories’, in which n-fold composites of 1-cells are specified for all natural n (rather than the usual nullary and binary presentation). We go on to show that the theories of (classical) bicategories and of unbiased bicategories are equivalent, in a strong sense. -

Overview of ∞-Operads As Analytic Monads
Overview of 1-Operads as Analytic Monads Noah Chrein March 12, 2019 Operads have been around for quite some time, back to May in the 70s Originally meant to capture some of the computational complexities of different associative and unital algebraic operations, Operads have found a home in a multitude of algebraic contexts, such as commutative ring theory, lie theory etc. Classicaly, Operads are defined as a sequence of O(n) of "n-ary" operations, sets which are meant to act on some category. These Operads are symmetric sequences, i.e. Functors O 2 CF in where Fin is the disconnected category of finite sets and bijections. Any symmetric sequence gives rise to an endofunctor a n T (X) = (O(n) ×Σn X ) which the authors call an "analytic functor" due to it's resemblance to a power series. An operad is a symmetric sequence with a notion of composition (of the n-ary operations) which is associative and unital. When O is an operad, the associated endofunctor takes the form of a monad, a special endofunctor with a unit and a multiplication. In both settings, we can consider algebras over operads, defined as maps O(n) × An ! A and algebras over a monad, maps T (A) ! A. In the case where the target category C = Set the algebras of an operad and it's associated monad can be recovered from one another However, when we are working with space, this equivalence fails. The point of the presented paper is to re-establish operads in the context of higher category theory in order to recover this algebra equivalence. -

Cofree Coalgebras Over Operads and Representative Functions
Cofree coalgebras over operads and representative functions M. Anel September 16, 2014 Abstract We give a recursive formula to compute the cofree coalgebra P _(C) over any colored operad P in V = Set; CGHaus; (dg)Vect. The construction is closed to that of [Smith] but different. We use a more conceptual approach to simplify the proofs that P _ is the cofree P -coalgebra functor and also the comonad generating P -coalgebras. In a second part, when V = (dg)Vect is the category of vector spaces or chain com- plexes over a field, we generalize to operads the notion of representative functions of [Block-Leroux] and prove that P _(C) is simply the subobject of representative elements in the "completed P -algebra" P ^(C). This says that our recursion (as well as that of [Smith]) stops at the first step. Contents 1 Introduction 2 2 The cofree coalgebra 4 2.1 Analytic functors . .4 2.2 Einstein convention . .5 2.3 Operads and associated functors . .7 2.4 Coalgebras over an operad . 10 2.5 The comonad of coendomorphisms . 12 2.6 Lax comonads and their coalgebras . 13 2.7 The coreflection theorem . 16 3 Operadic representative functions 21 3.1 Representative functions . 23 3.2 Translations and recursive functions . 25 3.3 Cofree coalgebras and representative functions . 27 1 1 Introduction This work has two parts. In a first part we prove that coalgebras over a (colored) operad P are coalgebras over a certain comonad P _ by giving a recursive construction of P _. In a second part we prove that the recursion is unnecessary in the case where the operad is enriched over vector spaces or chain complexes. -

Operads, Algebras and Modules in Model Categories and Motives
Operads, Algebras and Modules in Model Categories and Motives Dissertation zur Erlangung des Doktorgrades (Dr. rer. nat.) der Mathematisch-Naturwissenschaftlichen Fakult¨at der Rheinischen Friedrich-Wilhelms-Universit¨at Bonn vorgelegt von Markus Spitzweck aus Lindenberg Bonn, August 2001 2 Angefertigt mit Genehmigung der Mathematisch-Naturwissenschaftlichen Fakult¨at der Rheinischen Friedrich-Wilhelms-Universit¨at Bonn Referent: Prof. Dr. Gun¨ ter Harder Korreferent: Prof. Dr. Yuri Manin Tag der Promotion: 3 Contents 1. Introduction 4 Part I 2. Preliminaries 7 3. Operads 17 4. Algebras 24 5. Module structures 30 6. Modules 32 7. Functoriality 34 8. E -Algebras 36 1 9. S-Modules and Algebras 39 10. Proofs 44 11. Remark 49 Part II 12. A toy model 52 13. Unipotent objects as a module category 53 13.1. Subcategories generated by homotopy colimits 54 13.2. The result 54 14. Examples 56 14.1. Basic example 56 14.2. cd-structures 57 14.3. Sheaves with transfers 58 14.4. The tensor structure for sheaves with transfers 59 14.5. Spaces and sheaves with transfers 61 14.6. A1-localizations 62 14.7. T-stabilizations 62 14.8. Functoriality 63 15. Applications 63 15.1. Motives over smooth schemes 66 15.2. Limit Motives 69 References 76 4 1. Introduction This thesis consists of two parts. In the first part we develop a general machinery to study operads, algebras and modules in symmetric monoidal model categories. In particular we obtain a well behaved theory of E -algebras and modules over them, where E -algebras are an appropriate substitute1 of commutative algebras in model categories.1 This theory gives a derived functor formalism for commutative algebras and modules over them in any nice geometric situation, for example for categories of sheaves on manifolds or, as we show in the second part of the thesis, for triangulated categories of motivic sheaves on schemes. -
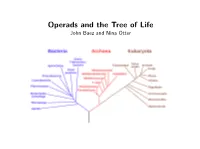
Operads and the Tree of Life
Operads and the Tree of Life John Baez and Nina Otter We have entered a new geological epoch, the Anthropocene, in which the biosphere is rapidly changing due to human activities. Last week two teams of scientists claimed the Western Antarctic Ice Sheet has been irreversibly destabilized, and will melt causing ∼ 3 meters of sea level rise in the centuries to come. So, we can expect that mathematicians will be increasingly focused on biology, ecology and complex systems | just as last century's mathematics was dominated by fundamental physics. Luckily, these new topics are full of fascinating mathematical structures|and while mathematics takes time to have an effect, it can do truly amazing things. Think of Church and Turing's work on computability, and computers today! Trees are important, not only in mathematics, but also biology. The most important is the `tree of life'. Darwin thought about it: In the 1860s, the German naturalist Haeckel drew it: Now we know that the `tree of life' is not really a tree, due to endosymbiosis and horizontal gene transfer: But a tree is often a good approximation. Biologists who try to infer phylogenetic trees from present-day genetic data often use simple models where: I the genotype of each species follows a random walk, but I species branch in two at various times. These are called Markov models. The simplest Markov model for DNA evolution is the Jukes{Cantor model. Consider a genome of fixed length: that is, one or more pieces of DNA having a total of N base pairs, each taken from the set fA,T,C,Gg: ··· ATCGATTGAGCTCTAGCG ··· As time passes, the Jukes{Cantor model says the genome changes randomly, with each base pair having the same constant rate of randomly flipping to any other. -

Definitions: Operads, Algebras and Modules
DEFINITIONS: OPERADS, ALGEBRAS AND MODULES J. P. MAY Let S be a symmetric monoidal category with product and unit object ·. Definition 1. An operad C in S consists of objects C (j), j ¸ 0, a unit map ´ : · ! C (1), a right action by the symmetric group Σj on C (j) for each j, and product maps γ : C (k) C (j1) ¢ ¢ ¢ C (jk) ! C (j) P for k ¸ 1 and js ¸ 0, where js = j. The γ are required to be associative, unital, and equivariant in the following senses. P P (a) The following associativity diagrams commute, where js = j and it = i; we set gs = j1 + ¢ ¢ ¢ + js, and hs = igs¡1+1 + ¢ ¢ ¢ + igs for 1 · s · k: Ok Oj Oj γid / C (k) ( C (js)) ( C (ir)) C (j) ( C (ir)) s=1 r=1 r=1 γ ² shuffle C (i) O ² γ Ok Ojs Ok / C (k) ( (C (js) ( C (igs¡1+q))) C (k) ( C (hs)): id (sγ) s=1 q=1 s=1 (b) The following unit diagrams commute: »= »= C (k) (·)k / C (k) · C (j) / C (j) rr8 r9 rr rrr id ´k rr ´id rr rr γ r γ ² rr ² rrr C (k) C (1)k C (1) C (j): (c) The following equivariance diagrams commute, where σ 2 Σk;¿s 2 Σjs , the permutation σ(j1; : : : ; jk) 2 Σj permutes k blocks of letter as σ permutes k letters, and ¿1 © ¢ ¢ ¢ © ¿k 2 Σj is the block sum: σσ¡1 C (k) C (j1) ¢ ¢ ¢ C (jk) / C (k) C (jσ(1)) ¢ ¢ ¢ C (jσ(k)) γ γ ² ² σ(jσ(1);:::;jσ(k)) C (j) / C (j) 1 2 J. -

Rainer M. Vogt Introduction to Algebra Over “Brave New Rings”
WSGP 18 Rainer M. Vogt Introduction to algebra over “brave new rings” In: Jan Slovák and Martin Čadek (eds.): Proceedings of the 18th Winter School "Geometry and Physics". Circolo Matematico di Palermo, Palermo, 1999. Rendiconti del Circolo Matematico di Palermo, Serie II, Supplemento No. 59. pp. 49--82. Persistent URL: http://dml.cz/dmlcz/701626 Terms of use: © Circolo Matematico di Palermo, 1999 Institute of Mathematics of the Academy of Sciences of the Czech Republic provides access to digitized documents strictly for personal use. Each copy of any part of this document must contain these Terms of use. This paper has been digitized, optimized for electronic delivery and stamped with digital signature within the project DML-CZ: The Czech Digital Mathematics Library http://project.dml.cz RENDICONTIDEL CIRCOLO MATEMATICO DIPALERMO Serie II, Suppl. 59 (1999) pp. 49-82 INTRODUCTION TO ALGEBRA OVER "BRAVE NEW RINGS" R.M. VOGT "Brave New Rings" is a catchphrase introduced by Waldhausen for algebraic structures on topological spaces which are ring structures up to coherent homotopies. "Coherent" means that the homotopies fit together nicely (see below). Such "rings" were intro duced in the mid seventies in an effort to analyze the structure of classifying spaces arising from geometry [32]. Waldhausen was the first person to extend classical algebraic constructions to the world of brave new rings. The most famous one is his algebraic if-theory of topological spaces [54], [55] which, in fact, is an extension of Quillen's algebraic if-functor to certain brave new rings. Other algebraic constructions are Bokstedt's topological Hochschild homology [6] or the topological cyclic homology of Goodwillie [14] or Bokstedt-Hsiang- Madsen [7]. -
The Categorical Origins of Entropy
The categorical origins of entropy Tom Leinster University of Edinburgh These slides: www.maths.ed.ac.uk/tl/ Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in science Entropy of one kind or another is important in very many branches of science: Entropy in category theory, algebra and topology The point of this talk Entropy is notable by its absence from category theory, algebra and topology. However, we will see that entropy is inevitable in pure mathematics: it is there whether we like it or not. p nq ∆ R Ó Ó CATEGORICAL MACHINE Ó Shannon entropy Image: J. Kock The point of this talk Entropy is notable by its absence from category theory, algebra and topology.