Gemensamma Teknikbehov Inom Obemannade Och Autonoma System Slutrapport
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Naming the Extrasolar Planets
Naming the extrasolar planets W. Lyra Max Planck Institute for Astronomy, K¨onigstuhl 17, 69177, Heidelberg, Germany [email protected] Abstract and OGLE-TR-182 b, which does not help educators convey the message that these planets are quite similar to Jupiter. Extrasolar planets are not named and are referred to only In stark contrast, the sentence“planet Apollo is a gas giant by their assigned scientific designation. The reason given like Jupiter” is heavily - yet invisibly - coated with Coper- by the IAU to not name the planets is that it is consid- nicanism. ered impractical as planets are expected to be common. I One reason given by the IAU for not considering naming advance some reasons as to why this logic is flawed, and sug- the extrasolar planets is that it is a task deemed impractical. gest names for the 403 extrasolar planet candidates known One source is quoted as having said “if planets are found to as of Oct 2009. The names follow a scheme of association occur very frequently in the Universe, a system of individual with the constellation that the host star pertains to, and names for planets might well rapidly be found equally im- therefore are mostly drawn from Roman-Greek mythology. practicable as it is for stars, as planet discoveries progress.” Other mythologies may also be used given that a suitable 1. This leads to a second argument. It is indeed impractical association is established. to name all stars. But some stars are named nonetheless. In fact, all other classes of astronomical bodies are named. -

CH02 End of Chapter Answers Review Questions 1. According To
CH02 End of Chapter Answers Review Questions 1. According to Figure 2-7, the following wavelengths fall within the following ranges of the electromagnetic spectrum: a. 2.6 m – Infrared b. 34 m – Radio c. 0.54 nm – X-rays d. 0.0032 nm – Gamma rays e. 0.620 m – Visible f. 310 nm – Ultraviolet g. 0.012 m – This lies right near the border between microwave and radio waves. Since the figure is not accurate to two decimal places, it is not possible to determine within which wavelength regime this falls. 2. Since radio waves are a form of electromagnetic radiation, they travel at the speed of light. The wavelength and frequency of any wave is related by the formula: f = c, where c is equal to the speed of light, or 3 × 108 m/s. Using this formula, and knowing the values for both c and f (880.65 MHz, or 8.8065 × 108 Hz), we can solve for the wavelength: = 3 × 108 m/s / 8.8065 x 108 Hz = 0.341 meters. 3. According to the Stefan-Boltzmann law, hotter objects radiate more intensely than cooler objects. According to Wien’s law, that energy is not radiated uniformly at all wavelengths, but mostly at a wavelength that is inversely proportional to the temperature of the object. As a hot, glowing object becomes hotter, it radiates more intensely at all wavelengths, becoming brighter, and shifts the peak wavelength (at which it radiates the most energy) to shorter wavelengths, becoming bluer. 4. According to the Stefan-Boltzmann law, the intensity of a blackbody object is related to the temperature of an object to the fourth power. -

CIRCULAR No. 170 (FEBRUARY 2010)
INTERNATIONAL ASTRONOMICAL UNION COMMISSION 26 (DOUBLE STARS) INFORMATION CIRCULAR No. 170 (FEBRUARY 2010) NEW ORBITS ADS Name P T e (2000) 2010 Author(s) ®2000± n a i ! Last ob. 2011 111 BU 391 AB 616y04 2095.68 0.103 81±75 259±0 100352 ZIRM 00094-2759 0±5925 100500 98±98 256±86 2006.940 258.9 1.346 - SEE3 406.00 1978.45 0.850 267.70 117.00 0.801 HARTKOPF 00098-3347 0.8871 1.119 41.7 77.6 2008.5490 117.70 0.814 & MASON - HDS 33 29.03 2018.12 0.378 177.0 132.0 0.189 CVETKOVIC 00143-2732 12.4010 0.251 59.8 73.9 2008.5432 141.6 0.199 - B 1024 1466. 1926.38 0.814 126.0 73.1 0.410 LING 00149-3209 0.2456 1.586 110.4 311.8 2008.5431 72.3 0.410 238 A1803AB 35.66 1950.70 0.002 124.10 306.00 0.179 HARTKOPF 00174+0853 10.0950 0.189 95.4 282.0 2008.7670 305.00 0.187 & MASON 281 BU1015 137.00 1961.65 0.557 291.20 103.80 0.483 HARTKOPF 00206+1219 2.6283 0.333 35.0 10.0 2008.8879 104.70 0.487 & MASON - HDS 56 28.05 1999.30 0.481 96.1 294.0 0.326 CVETKOVIC 00251+4803 12.8323 0.230 164.0 358.9 2007.8257 288.7 0.334 - B1909 11.35 1995.09 0.005 119.49 311.90 0.175 HARTKOPF 00284-2020 31.7093 0.202 69.8 99.0 2009.6710 334.80 0.109 & MASON 475 D2AB 2981.00 2007.00 0.923 266.00 42.80 0.067 HARTKOPF 00345-0433 0.1208 2.740 77.5 80.2 2009.7560 55.40 0.090 & MASON 520 BU395 25.02 1998.78 0.218 291.98 96.70 0.496 HARTKOPF 00373-2446 14.3905 0.675 78.6 318.1 2009.7560 101.00 0.596 & MASON - I440 196.00 2142.00 0.650 57.00 269.30 0.402 HARTKOPF 00427-6537 1.8350 0.274 157.0 344.0 2009.6710 268.70 0.405 & MASON 1 NEW ORBITS (continuation) ADS Name P T e (2000) 2010 Author(s) ®2000± n a i ! Last ob. -

Download This Issue (Pdf)
Volume 46 Number 1 JAAVSO 2018 The Journal of the American Association of Variable Star Observers Optical Flares and Quasi-Periodic Pulsations on CR Draconis during Periastron Passage Upper panel: 2017-10-10-flare photon counts, time aligned with FFT spectrogram. Lower panel: FFT spectrogram shows time in UT seconds versus QPP periods in seconds. Flares cited by Doyle et al. (2018) are shown with (*). Also in this issue... • The Dwarf Nova SY Cancri and its Environs • KIC 8462852: Maria Mitchell Observatory Photographic Photometry 1922 to 1991 • Visual Times of Maxima for Short Period Pulsating Stars III • Recent Maxima of 86 Short Period Pulsating Stars Complete table of contents inside... The American Association of Variable Star Observers 49 Bay State Road, Cambridge, MA 02138, USA The Journal of the American Association of Variable Star Observers Editor John R. Percy Kosmas Gazeas Kristine Larsen Dunlap Institute of Astronomy University of Athens Department of Geological Sciences, and Astrophysics Athens, Greece Central Connecticut State University, and University of Toronto New Britain, Connecticut Toronto, Ontario, Canada Edward F. Guinan Villanova University Vanessa McBride Associate Editor Villanova, Pennsylvania IAU Office of Astronomy for Development; Elizabeth O. Waagen South African Astronomical Observatory; John B. Hearnshaw and University of Cape Town, South Africa Production Editor University of Canterbury Michael Saladyga Christchurch, New Zealand Ulisse Munari INAF/Astronomical Observatory Laszlo L. Kiss of Padua Editorial Board Konkoly Observatory Asiago, Italy Geoffrey C. Clayton Budapest, Hungary Louisiana State University Nikolaus Vogt Baton Rouge, Louisiana Katrien Kolenberg Universidad de Valparaiso Universities of Antwerp Valparaiso, Chile Zhibin Dai and of Leuven, Belgium Yunnan Observatories and Harvard-Smithsonian Center David B. -

Vente De 2 Ans Montés Samedi 14 Mai Breeze Le 13 Mai
11saint-cloud Vente de 2 ans montés Samedi 14 mai Breeze le 13 mai en association avec Index_Alpha_14_05 24/03/11 19:09 Page 71 Index alphabétique Alphabetical index NomsNOM des yearlings . .SUF . .Nos LOT NOM LOT ALKATARA . .0142 N(FAB'S MELODY 2009) . .0030 AMESBURY . .0148 N(FACTICE 2009) . .0031 FORCE MAJEUR . .0003 N(FAR DISTANCE 2009) . .0032 JOHN TUCKER . .0103 N(FIN 2009) . .0034 LIBERTY CAT . .0116 N(FLAMES 2009) . .0035 LUCAYAN . .0051 N(FOLLE LADY 2009) . .0036 MARCILHAC . .0074 N(FRANCAIS 2009) . .0037 MOST WANTED . .0123 N(GENDER DANCE 2009) . .0038 N(ABBEYLEIX LADY 2009) . .0139 N(GERMANCE 2009) . .0039 N(ABINGTON ANGEL 2009) . .0140 N(GILT LINKED 2009) . .0040 N(AIR BISCUIT 2009) . .0141 N(GREAT LADY SLEW 2009) . .0041 N(ALL EMBRACING 2009) . .0143 N(GRIN AND DARE IT 2009) . .0042 N(AMANDIAN 2009) . .0144 N(HARIYA 2009) . .0043 N(AMAZON BEAUTY 2009) . .0145 N(HOH MY DARLING 2009) . .0044 N(AMY G 2009) . .0146 N(INFINITY 2009) . .0045 N(ANSWER DO 2009) . .0147 N(INKLING 2009) . .0046 N(ARES VALLIS 2009) . .0149 N(JUST WOOD 2009) . .0048 N(AUCTION ROOM 2009) . .0150 N(KACSA 2009) . .0049 N(AVEZIA 2009) . .0151 N(KASSARIYA 2009) . .0050 N(BARCONEY 2009) . .0152 N(LALINA 2009) . .0052 N(BASHFUL 2009) . .0153 N(LANDELA 2009) . .0053 N(BAYOURIDA 2009) . .0154 N(LES ALIZES 2009) . .0054 N(BEE EATER 2009) . .0155 N(LIBRE 2009) . .0055 N(BELLA FIORELLA 2009) . .0156 N(LOUELLA 2009) . .0056 N(BERKELEY LODGE 2009) . .0157 N(LUANDA 2009) . .0057 N(BLACK PENNY 2009) . .0158 N(LUNA NEGRA 2009) . -

Popular Names of Deep Sky (Galaxies,Nebulae and Clusters) Viciana’S List
POPULAR NAMES OF DEEP SKY (GALAXIES,NEBULAE AND CLUSTERS) VICIANA’S LIST 2ª version August 2014 There isn’t any astronomical guide or star chart without a list of popular names of deep sky objects. Given the huge amount of celestial bodies labeled only with a number, the popular names given to them serve as a friendly anchor in a broad and complicated science such as Astronomy The origin of these names is varied. Some of them come from mythology (Pleiades); others from their discoverer; some describe their shape or singularities; (for instance, a rotten egg, because of its odor); and others belong to a constellation (Great Orion Nebula); etc. The real popular names of celestial bodies are those that for some special characteristic, have been inspired by the imagination of astronomers and amateurs. The most complete list is proposed by SEDS (Students for the Exploration and Development of Space). Other sources that have been used to produce this illustrated dictionary are AstroSurf, Wikipedia, Astronomy Picture of the Day, Skymap computer program, Cartes du ciel and a large bibliography of THE NAMES OF THE UNIVERSE. If you know other name of popular deep sky objects and you think it is important to include them in the popular names’ list, please send it to [email protected] with at least three references from different websites. If you have a good photo of some of the deep sky objects, please send it with standard technical specifications and an optional comment. It will be published in the names of the Universe blog. It could also be included in the ILLUSTRATED DICTIONARY OF POPULAR NAMES OF DEEP SKY. -
Meteor.Mcse.Hu
MCSE 2016/3 meteor.mcse.hu A Mars négy arca SZJA 1%! Az MCSE adószáma: 19009162-2-43 A Tharsis-régió három pajzsvulkánja és az Olympus Mons a Mars Express 2014. június 29-én készült felvételén (ESA / DLR / FU Berlin / Justin Cowart). TARTALOM Áttörés a fizikában......................... 3 GW150914: elõször hallottuk az Univerzum zenéjét....................... 4 A csillagászat ............................ 8 meteorA Magyar Csillagászati Egyesület lapja Journal of the Hungarian Astronomical Association Csillagászati hírek ........................ 10 H–1300 Budapest, Pf. 148., Hungary 1037 Budapest, Laborc u. 2/C. A távcsövek világa TELEFON/FAX: (1) 240-7708, +36-70-548-9124 Egy „klasszikus” naptávcsõ születése ........ 18 E-MAIL: [email protected], Honlap: meteor.mcse.hu HU ISSN 0133-249X Szabadszemes jelenségek Kiadó: Magyar Csillagászati Egyesület Gyöngyházfényû felhõk – történelmi észlelés! .. 22 FÔSZERKESZTÔ: Mizser Attila A hónap asztrofotója: hajnali együttállás ....... 27 SZERKESZTÔBIZOTTSÁG: Dr. Fûrész Gábor, Dr. Kiss László, Dr. Kereszturi Ákos, Dr. Kolláth Zoltán, Bolygók Mizser Attila, Dr. Sánta Gábor, Sárneczky Krisztián, Mars-oppozíció 2014 .................... 28 Dr. Szabados László és Dr. Szalai Tamás SZÍNES ELÕKÉSZÍTÉS: KÁRMÁN STÚDIÓ Nap FELELÔS KIADÓ: AZ MCSE ELNÖKE Téli változékony Napok .................38 A Meteor elôfizetési díja 2016-ra: (nem tagok számára) 7200 Ft Hold Egy szám ára: 600 Ft Januári Hold .........................42 Az egyesületi tagság formái (2016) • rendes tagsági díj (jogi személyek számára is) Meteorok -
Observing List
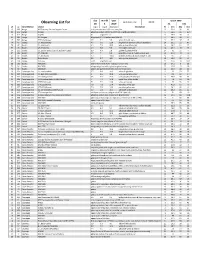
day month year Epoch 2000 local clock time: 22.00 Observing List for 18 5 2019 RA DEC alt az Constellation object mag A mag B Separation description hr min deg min 10 305 Auriga M37 January Salt and Pepper Cluster rich, open cluster of 150 stars, very fine 5 52.4 32 33 20 315 Auriga IC2149 planetary nebula, stellar to small disk, slightly elongated 5 56.5 46 6.3 15 319 Auriga Capella 0.1 alignment star 5 16.6 46 0 21 303 Auriga UU Aurigae Magnitude 5.1-7.0 carbon star (AL# 36) 6 36.5 38 27 15 307 Auriga 37 Theta Aurigae 2.6 7.1 3.6 white & bluish stars 5 59.7 37 13 74 45 Bootes 17, Kappa Bootis 4.6 6.6 13.4 bright white primary & bluish secondary 14 13.5 51 47 73 47 Bootes 21, Iota Bootis 4.9 7.5 38.5 wide yellow & blue pair 14 16.2 51 22 57 131 Bootes 29, Pi Bootis 4.9 5.8 5.6 fine bright white pair 14 40.7 16 25 64 115 Bootes 36, Epsilon Bootis (Izar) (*311) (HIP72105) 2.9 4.9 2.8 golden & greenish-blue 14 45 27 4 57 124 Bootes 37, Xi Bootis 4.7 7 6.6 beautiful yellow & reddish orange pair 14 51.4 19 6 62 86 Bootes 51, Mu Bootis 4.3 7 108.3 primary of yellow & close orange BC pair 15 24.5 37 23 62 96 Bootes Delta Bootis 3.5 8.7 105 wide yellow & blue pair 15 15.5 33 19 62 138 Bootes Arcturus -0.11 alignment star 14 15.6 19 10.4 56 162 Bootes NGC5248 galaxy with bright stellar nucleus and oval halo 13 37.5 8 53 72 56 Bootes NGC5676 elongated galaxy with slightly brighter center 14 32.8 49 28 72 59 Bootes NGC5689 galaxy, elongated streak with prominent oval core 14 35.5 48 45 16 330 Camelopardalis 1 Camelopardalis 5.7 6.8 10.3 white & -
Observing List
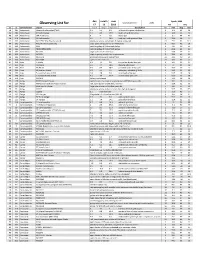
day month year Epoch 2000 local clock time: 2.00 Observing List for 17 11 2019 RA DEC alt az Constellation object mag A mag B Separation description hr min deg min 58 286 Andromeda Gamma Andromedae (*266) 2.3 5.5 9.8 yellow & blue green double star 2 3.9 42 19 40 283 Andromeda Pi Andromedae 4.4 8.6 35.9 bright white & faint blue 0 36.9 33 43 48 295 Andromeda STF 79 (Struve) 6 7 7.8 bluish pair 1 0.1 44 42 59 279 Andromeda 59 Andromedae 6.5 7 16.6 neat pair, both greenish blue 2 10.9 39 2 32 301 Andromeda NGC 7662 (The Blue Snowball) planetary nebula, fairly bright & slightly elongated 23 25.9 42 32.1 44 292 Andromeda M31 (Andromeda Galaxy) large sprial arm galaxy like the Milky Way 0 42.7 41 16 44 291 Andromeda M32 satellite galaxy of Andromeda Galaxy 0 42.7 40 52 44 293 Andromeda M110 (NGC205) satellite galaxy of Andromeda Galaxy 0 40.4 41 41 56 279 Andromeda NGC752 large open cluster of 60 stars 1 57.8 37 41 62 285 Andromeda NGC891 edge on galaxy, needle-like in appearance 2 22.6 42 21 30 300 Andromeda NGC7640 elongated galaxy with mottled halo 23 22.1 40 51 35 308 Andromeda NGC7686 open cluster of 20 stars 23 30.2 49 8 47 258 Aries 1 Arietis 6.2 7.2 2.8 fine yellow & pale blue pair 1 50.1 22 17 57 250 Aries 30 Arietis 6.6 7.4 38.6 pleasing yellow pair 2 37 24 39 59 253 Aries 33 Arietis 5.5 8.4 28.6 yellowish-white & blue pair 2 40.7 27 4 59 239 Aries 48, Epsilon Arietis 5.2 5.5 1.5 white pair, splittable @ 150x 2 59.2 21 20 46 254 Aries 5, Gamma Arietis (*262) 4.8 4.8 7.8 nice bluish-white pair 1 53.5 19 18 49 258 Aries 9, Lambda Arietis -

The Fixed Stars Report Hillary Rodham Clinton
The Fixed Stars Report by Tara Cochrane for Hillary Rodham Clinton October 26, 1947 8:00 PM Chicago, Illinois Calculated for: Standard time, Time Zone 6 hours West Latitude: 41 N 51 Longitude: 87 W 39 Introduction Report and Text Copyright 2009 Cosmic Patterns Software, Inc. The contents of this report are protected by Copyright law. By purchasing this report you agree to comply with this Copyright. This report interprets conjunctions of nearly every fixed star that has been given an astrological name to the planets, Asc, MC, 7th house cusp, and 4th cusp. Each interpretation given in this report is based on extensive research on the historical astrological meanings and myths associated with the fixed stars. A list of notable people who have the same conjunction aspect as you do is also given. This comprehensive analysis of the influence of the fixed stars combined with a list of notable people who also have this aspect provides you with extensive information, and hopefully astrologers who use this report can use this information to develop an even more refined and clearer understanding of the meaning of every fixed stars. Interpretations of the Fixed Stars Sun conjunct Alkalurops, Orb: 0 deg 22 min Independent, stable, autonomous, willful, assertive and decisive attributes are indicated. The individual may feel called to provide wisdom, guidance, oversight or direction to others. A position of authority and respect may be attained. Political, executive, regulatory and custodial pursuits are favored. Alkalurops is Mu 1 Bootis in the constellation of Bootes, the Herdsman. The name Alkalurops is derived from the Greek word for a shepherd's crooked staff. -
Prospective Imaging Objects – February 11, 2021
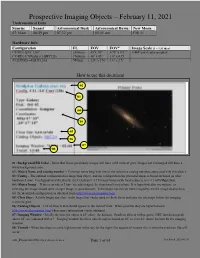
Prospective Imaging Objects – February 11, 2021 7Astronomical Data Sunrise Sunset Astronomical Dusk Astronomical Dawn New Moon 07:14am 06:09 pm 07:32 pm 05:51 am Feb 11 Hardware Info Configuration FL FOV FOV° Image Scale (1 – 1.5) ideal C11HD | QHY 128C 2800mm 45’x 30’ 0.75° x 0.5° 0.444°/pix (Undersampled) C11HD | 0.7xReducer | QHY128c 1960mm 60’ x 45’ 1.0° x 0.75° |C11HD|HS-v4|QHY128c| 540mm 228’ x 150’ 3.8° x 2.5° How to use this document 02 03 04 01 05 06 07 08 01: Background Fill Color - Items that I have previously images will have a fill color of grey, Images not yet imaged will have a white background color. 02: Object Name and catalog number – Common name long with one of the reference catalog numbers associated with this object. 03: Config – The optimal configuration to image this object, and the configuration the provided image is based on based on what hardware I own. Configuration will either be the Celestron C-11 Primary focus (with focal reducer) or C-11 with HyperStar. 04: Object Image – If this is an object I have already imaged, the thumbnail is my photo. It is hyperlinked to my website, so selecting the image should open a larger image in your browser. If the object has not yet been imaged by me the image displayed is for the identified configuration as obtained from http://www.telescopious.com. 05: Close Star – A fairly bright star close to the target that can be used to check focus and sync the telescope before the imaging session begins. -
Star Name Identity SAO HD FK5 Magnitude Spectral Class Right Ascension Declination Alpheratz Alpha Andromedae 73765 358 1 2,06 B
Star Name Identity SAO HD FK5 Magnitude Spectral class Right ascension Declination Alpheratz Alpha Andromedae 73765 358 1 2,06 B8IVpMnHg 00h 08,388m 29° 05,433' Caph Beta Cassiopeiae 21133 432 2 2,27 F2III-IV 00h 09,178m 59° 08,983' Algenib Gamma Pegasi 91781 886 7 2,83 B2IV 00h 13,237m 15° 11,017' Ankaa Alpha Phoenicis 215093 2261 12 2,39 K0III 00h 26,283m - 42° 18,367' Schedar Alpha Cassiopeiae 21609 3712 21 2,23 K0IIIa 00h 40,508m 56° 32,233' Deneb Kaitos Beta Ceti 147420 4128 22 2,04 G9.5IIICH-1 00h 43,590m - 17° 59,200' Achird Eta Cassiopeiae 21732 4614 3,44 F9V+dM0 00h 49,100m 57° 48,950' Tsih Gamma Cassiopeiae 11482 5394 32 2,47 B0IVe 00h 56,708m 60° 43,000' Haratan Eta ceti 147632 6805 40 3,45 K1 01h 08,583m - 10° 10,933' Mirach Beta Andromedae 54471 6860 42 2,06 M0+IIIa 01h 09,732m 35° 37,233' Alpherg Eta Piscium 92484 9270 50 3,62 G8III 01h 13,483m 15° 20,750' Rukbah Delta Cassiopeiae 22268 8538 48 2,66 A5III-IV 01h 25,817m 60° 14,117' Achernar Alpha Eridani 232481 10144 54 0,46 B3Vpe 01h 37,715m - 57° 14,200' Baten Kaitos Zeta Ceti 148059 11353 62 3,74 K0IIIBa0.1 01h 51,460m - 10° 20,100' Mothallah Alpha Trianguli 74996 11443 64 3,41 F6IV 01h 53,082m 29° 34,733' Mesarthim Gamma Arietis 92681 11502 3,88 A1pSi 01h 53,530m 19° 17,617' Navi Epsilon Cassiopeiae 12031 11415 63 3,38 B3III 01h 54,395m 63° 40,200' Sheratan Beta Arietis 75012 11636 66 2,64 A5V 01h 54,640m 20° 48,483' Risha Alpha Piscium 110291 12447 3,79 A0pSiSr 02h 02,047m 02° 45,817' Almach Gamma Andromedae 37734 12533 73 2,26 K3-IIb 02h 03,900m 42° 19,783' Hamal Alpha