COMPUTING with CELLS and ATOMS an Introduction to Quantum, DNA and Membrane Computing AUTHORS ADDRESSES
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
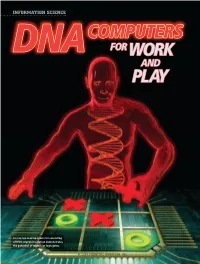
DNA Computers for Work and Play
INFORMATION SCIENCE COMPUTERS DNA FOR WORK AND PL AY TIC-TAC-TOE-PLAYING COMPUTER consisting of DNA strands in solution demonstrates the potential of molecular logic gates. © 2008 SCIENTIFIC AMERICAN, INC. Logic gates made of DNA could one day operate in your bloodstream, collectively making medical decisions and taking action. For now, they play a mean game of in vitro tic-tac-toe By Joanne Macdonald, Darko Stefanovic and Milan N. Stojanovic rom a modern chemist’s perspective, the mentary school in Belgrade, Serbia, we hap- structure of DNA in our genes is rather pened to be having dinner, and, encouraged by Fmundane. The molecule has a well-known some wine, we considered several topics, includ- importance for life, but chemists often see only ing bioinformatics and various existing ways of a uniform double helix with almost no function- using DNA to perform computations. We decid- al behavior on its own. It may come as a surprise, ed to develop a new method to employ molecules then, to learn that this molecule is the basis of a to compute and make decisions on their own. truly rich and strange research area that bridges We planned to borrow an approach from synthetic chemistry, enzymology, structural electrical engineering and create a set of molec- nanotechnology and computer science. ular modules, or primitives, that would perform Using this new science, we have constructed elementary computing operations. In electrical molecular versions of logic gates that can oper- engineering the computing primitives are called ate in water solution. Our goal in building these logic gates, with intuitive names such as AND, DNA-based computing modules is to develop OR and NOT. -

Varying Constants, Gravitation and Cosmology
Varying constants, Gravitation and Cosmology Jean-Philippe Uzan Institut d’Astrophysique de Paris, UMR-7095 du CNRS, Universit´ePierre et Marie Curie, 98 bis bd Arago, 75014 Paris (France) and Department of Mathematics and Applied Mathematics, Cape Town University, Rondebosch 7701 (South Africa) and National Institute for Theoretical Physics (NITheP), Stellenbosch 7600 (South Africa). email: [email protected] http//www2.iap.fr/users/uzan/ September 29, 2010 Abstract Fundamental constants are a cornerstone of our physical laws. Any constant varying in space and/or time would reflect the existence of an almost massless field that couples to mat- ter. This will induce a violation of the universality of free fall. It is thus of utmost importance for our understanding of gravity and of the domain of validity of general relativity to test for their constancy. We thus detail the relations between the constants, the tests of the local posi- tion invariance and of the universality of free fall. We then review the main experimental and observational constraints that have been obtained from atomic clocks, the Oklo phenomenon, Solar system observations, meteorites dating, quasar absorption spectra, stellar physics, pul- sar timing, the cosmic microwave background and big bang nucleosynthesis. At each step we arXiv:1009.5514v1 [astro-ph.CO] 28 Sep 2010 describe the basics of each system, its dependence with respect to the constants, the known systematic effects and the most recent constraints that have been obtained. We then describe the main theoretical frameworks in which the low-energy constants may actually be varying and we focus on the unification mechanisms and the relations between the variation of differ- ent constants. -

Limits on Efficient Computation in the Physical World
Limits on Efficient Computation in the Physical World by Scott Joel Aaronson Bachelor of Science (Cornell University) 2000 A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the GRADUATE DIVISION of the UNIVERSITY of CALIFORNIA, BERKELEY Committee in charge: Professor Umesh Vazirani, Chair Professor Luca Trevisan Professor K. Birgitta Whaley Fall 2004 The dissertation of Scott Joel Aaronson is approved: Chair Date Date Date University of California, Berkeley Fall 2004 Limits on Efficient Computation in the Physical World Copyright 2004 by Scott Joel Aaronson 1 Abstract Limits on Efficient Computation in the Physical World by Scott Joel Aaronson Doctor of Philosophy in Computer Science University of California, Berkeley Professor Umesh Vazirani, Chair More than a speculative technology, quantum computing seems to challenge our most basic intuitions about how the physical world should behave. In this thesis I show that, while some intuitions from classical computer science must be jettisoned in the light of modern physics, many others emerge nearly unscathed; and I use powerful tools from computational complexity theory to help determine which are which. In the first part of the thesis, I attack the common belief that quantum computing resembles classical exponential parallelism, by showing that quantum computers would face serious limitations on a wider range of problems than was previously known. In partic- ular, any quantum algorithm that solves the collision problem—that of deciding whether a sequence of n integers is one-to-one or two-to-one—must query the sequence Ω n1/5 times. -

The Complexity Zoo
The Complexity Zoo Scott Aaronson www.ScottAaronson.com LATEX Translation by Chris Bourke [email protected] 417 classes and counting 1 Contents 1 About This Document 3 2 Introductory Essay 4 2.1 Recommended Further Reading ......................... 4 2.2 Other Theory Compendia ............................ 5 2.3 Errors? ....................................... 5 3 Pronunciation Guide 6 4 Complexity Classes 10 5 Special Zoo Exhibit: Classes of Quantum States and Probability Distribu- tions 110 6 Acknowledgements 116 7 Bibliography 117 2 1 About This Document What is this? Well its a PDF version of the website www.ComplexityZoo.com typeset in LATEX using the complexity package. Well, what’s that? The original Complexity Zoo is a website created by Scott Aaronson which contains a (more or less) comprehensive list of Complexity Classes studied in the area of theoretical computer science known as Computa- tional Complexity. I took on the (mostly painless, thank god for regular expressions) task of translating the Zoo’s HTML code to LATEX for two reasons. First, as a regular Zoo patron, I thought, “what better way to honor such an endeavor than to spruce up the cages a bit and typeset them all in beautiful LATEX.” Second, I thought it would be a perfect project to develop complexity, a LATEX pack- age I’ve created that defines commands to typeset (almost) all of the complexity classes you’ll find here (along with some handy options that allow you to conveniently change the fonts with a single option parameters). To get the package, visit my own home page at http://www.cse.unl.edu/~cbourke/. -

Ab Initio Investigations of the Intrinsic Optical Properties of Germanium and Silicon Nanocrystals
Ab initio Investigations of the Intrinsic Optical Properties of Germanium and Silicon Nanocrystals D i s s e r t a t i o n zur Erlangung des akademischen Grades doctor rerum naturalium (Dr. rer. nat.) vorgelegt dem Rat der Physikalisch-Astronomischen Fakultät der Friedrich-Schiller-Universität Jena von Dipl.-Phys. Hans-Christian Weißker geboren am 12. Juli 1971 in Greiz Gutachter: 1. Prof. Dr. Friedhelm Bechstedt, Jena. 2. Dr. Lucia Reining, Palaiseau, Frankreich. 3. Prof. Dr. Victor Borisenko, Minsk, Weißrußland. Tag der letzten Rigorosumsprüfung: 12. August 2004. Tag der öffentlichen Verteidigung: 19. Oktober 2004. Why is warrant important to knowledge? In part because true opinion might be reached by arbitrary, unreliable means. Peter Railton1 1Explanation and Metaphysical Controversy, in P. Kitcher and W.C. Salmon (eds.), Scientific Explanation, Vol. 13, Minnesota Studies in the Philosophy of Science, Minnesota, 1989. Contents 1 Introduction 7 2 Theoretical Foundations 13 2.1 Density-Functional Theory . 13 2.1.1 The Hohenberg-Kohn Theorem . 13 2.1.2 The Kohn-Sham scheme . 15 2.1.3 Transition to system without spin-polarization . 17 2.1.4 Physical interpretation by comparison to Hartree-Fock . 17 2.1.5 LDA and LSDA . 19 2.1.6 Forces in DFT . 19 2.2 Excitation Energies . 20 2.2.1 Quasiparticles . 20 2.2.2 Self-energy corrections . 22 2.2.3 Excitation energies from total energies . 25 QP 2.2.3.1 Conventional ∆SCF method: Eg = I − A . 25 QP 2.2.3.2 Discussion of the ∆SCF method Eg = I − A . 25 2.2.3.3 ∆SCF with occupation constraint . -

Natural Computing Conclusion
Introduction Natural Computing Conclusion Natural Computing Dr Giuditta Franco Department of Computer Science, University of Verona, Italy [email protected] For the logistics of the course, please see the syllabus Dr Giuditta Franco Slides Natural Computing 2017 Introduction Natural Computing Natural Computing Conclusion Natural Computing Natural (complex) systems work as (biological) information elaboration systems, by sophisticated mechanisms of goal-oriented control, coordination, organization. Computational analysis (mat modeling) of life is important as observing birds for designing flying objects. "Informatics studies information and computation in natural and artificial systems” (School of Informatics, Univ. of Edinburgh) Computational processes observed in and inspired by nature. Ex. self-assembly, AIS, DNA computing Ex. Internet of things, logics, programming, artificial automata are not natural computing. Dr Giuditta Franco Slides Natural Computing 2017 Introduction Natural Computing Natural Computing Conclusion Bioinformatics versus Infobiotics Applying statistics, performing tools, high technology, large databases, to analyze bio-logical/medical data, solve problems, formalize/frame natural phenomena. Ex. search algorithms to recover genomic/proteomic data, to process them, catalogue and make them publically accessible, to infer models to simulate their dynamics. Identifying informational mechanisms underlying living systems, how they assembled and work, how biological information may be defined, processed, decoded. New -

Alternative Computational Models: a Comparison of Biomolecular and Quantum Computation
Alternative Computational Models: A Comparison of Biomolecular and Quantum Computation John H. Reif Department of Computer Science Duke University ∗ Abstract Molecular Computation (MC) is massively parallel computation where data is stored and processed within objects of molecular size. Biomolecular Computation (BMC) is MC using biotechnology techniques, e.g. recombinant DNA operations. In contrast, Quantum Computation (QC) is a type of computation where unitary and measurement operations are executed on linear superpositions of basis states. Both BMC and QC may be executed at the micromolecular scale by a variety of methodologies and technologies. This paper surveys various methods for doing BMC and QC and discusses the considerable theoretical and practical advances in BMC and QC made in the last few years. We compare bounds on key resource such as time, volume (number of molecules times molecular density), energy and error rates achievable, taking particular note of the scalability of these methods with the size of the problem solved. In addition to NP search problems and database search problems, we enumerate a wide variety of further potential practical applications of BMC and QC. We observe that certain problems (e.g., NP search problems), if solved with polynomial time bounds, requires exponentially large volume for BMC, so BMC does not scale well to solve very large NP search problems. However, we describe a number of applications (e.g., search within large data bases and simu- lation of parallel machines) where the volume grows polynomial. Also, we note that the observation operation of QC, which is a fundamental operation of QC used for obtaining classical output, may potentially suffer from exponentially large volume requirements. -

Solving Travelling Salesman Problem in a Simulation of Genetic Algorithms with Dna
International Journal "Information Theories & Applications" Vol.15 / 2008 357 SOLVING TRAVELLING SALESMAN PROBLEM IN A SIMULATION OF GENETIC ALGORITHMS WITH DNA Angel Goñi Moreno Abstract: In this paper it is explained how to solve a fully connected N-City travelling salesman problem (TSP) using a genetic algorithm. A crossover operator to use in the simulation of a genetic algorithm (GA) with DNA is presented. The aim of the paper is to follow the path of creating a new computational model based on DNA molecules and genetic operations. This paper solves the problem of exponentially size algorithms in DNA computing by using biological methods and techniques. After individual encoding and fitness evaluation, a protocol of the next step in a GA, crossover, is needed. This paper also shows how to make the GA faster via different populations of possible solutions. Keywords: DNA Computing, Evolutionary Computing, Genetic Algorithms. ACM Classification Keywords: I.6. Simulation and Modeling, B.7.1 Advanced Technologies, J.3 Biology and Genetics Introduction In a short period of time DNA based computations have shown lots of advantages compared with electronic computers. DNA computers can solve combinatorial problems that an electronic computer cannot like the well known class of NP complete problems. That is due to the fact that DNA computers are massively parallel [Adleman, 1994]. However, the biggest disadvantage is that until now molecular computation has been used with exact and “brute force” algorithms. It is necessary for DNA computation to expand its algorithmic techniques to incorporate aproximative and probabilistic algorithms and heuristics so the resolution of large instances of NP complete problems will be possible. -

The Many Facets of Natural Computing
The Many Facets of Natural Computing Lila Kari0 Grzegorz Rozenberg Department of Computer Science Leiden Inst. of Advanced Computer Science University of Western Ontario Leiden University, Niels Bohrweg 1 London, ON, N6A 5B7, Canada 2333 CA Leiden, The Netherlands [email protected] Department of Computer Science University of Colorado at Boulder Boulder, CO 80309, USA [email protected] “Biology and computer science - life and computation - are various natural phenomena. Thus, rather than being over- related. I am confident that at their interface great discoveries whelmed by particulars, it is our hope that the reader will await those who seek them.” (L.Adleman, [3]) see this article as simply a window onto the profound rela- tionship that exists between nature and computation. There is information processing in nature, and the natu- 1. FOREWORD ral sciences are already adapting by incorporating tools and Natural computing is the field of research that investi- concepts from computer science at a rapid pace. Conversely, gates models and computational techniques inspired by na- a closer look at nature from the point of view of information ture and, dually, attempts to understand the world around processing can and will change what we mean by computa- us in terms of information processing. It is a highly in- tion. Our invitation to you, fellow computer scientists, is to terdisciplinary field that connects the natural sciences with take part in the uncovering of this wondrous connection.1 computing science, both at the level of information tech- nology and at the level of fundamental research, [98]. As a matter of fact, natural computing areas and topics come in many flavours, including pure theoretical research, algo- 2. -

The Nanobank Database Is Available at for Free Use for Research Purposes
Forthcoming: Annals of Economics and Statistics (Annales d’Economie et Statistique), Issue 115/116, in press 2014 NBER WORKING PAPER SERIES COMMUNITYWIDE DATABASE DESIGNS FOR TRACKING INNOVATION IMPACT: COMETS, STARS AND NANOBANK Lynne G. Zucker Michael R. Darby Jason Fong Working Paper No. 17404 http://www.nber.org/papers/w17404 NATIONAL BUREAU OF ECONOMIC RESEARCH 1050 Massachusetts Avenue Cambridge, MA 02138 September 2011 Revised March 2014 The construction of Nanobank was supported under major grants from the National Science Foundation (SES- 0304727 and SES-0531146) and the University of California’s Industry-University Cooperative Research Program (PP9902, P00-04, P01-02, and P03-01). Additional support was received from the California NanoSystems Institute, Sun Microsystems, Inc., UCLA’s International Institute, and from the UCLA Anderson School’s Center for International Business Education and Research (CIBER) and the Harold Price Center for Entrepreneurial Studies. The COMETS database (also known as the Science and Technology Agents of Revolution or STARS database) is being constructed for public research use under major grants from the Ewing Marion Kauffman Foundation (2008- 0028 and 2008-0031) and the Science of Science and Innovation Policy (SciSIP) Program at the National Science Foundation (grants SES-0830983 and SES-1158907) with support from other agencies. Our colleague Jonathan Furner of the UCLA Department of Information Studies played a leading role in developing the methodology for selecting records for Nanobank. We are indebted to our scientific and policy advisors Roy Doumani, James R. Heath, Evelyn Hu, Carlo Montemagno, Roger Noll, and Fraser Stoddart, and to our research team, especially Amarita Natt, Hsing-Hau Chen, Robert Liu, Hongyan Ma, Emre Uyar, and Stephanie Hwang Der. -

Quantum Computing : a Gentle Introduction / Eleanor Rieffel and Wolfgang Polak
QUANTUM COMPUTING A Gentle Introduction Eleanor Rieffel and Wolfgang Polak The MIT Press Cambridge, Massachusetts London, England ©2011 Massachusetts Institute of Technology All rights reserved. No part of this book may be reproduced in any form by any electronic or mechanical means (including photocopying, recording, or information storage and retrieval) without permission in writing from the publisher. For information about special quantity discounts, please email [email protected] This book was set in Syntax and Times Roman by Westchester Book Group. Printed and bound in the United States of America. Library of Congress Cataloging-in-Publication Data Rieffel, Eleanor, 1965– Quantum computing : a gentle introduction / Eleanor Rieffel and Wolfgang Polak. p. cm.—(Scientific and engineering computation) Includes bibliographical references and index. ISBN 978-0-262-01506-6 (hardcover : alk. paper) 1. Quantum computers. 2. Quantum theory. I. Polak, Wolfgang, 1950– II. Title. QA76.889.R54 2011 004.1—dc22 2010022682 10987654321 Contents Preface xi 1 Introduction 1 I QUANTUM BUILDING BLOCKS 7 2 Single-Qubit Quantum Systems 9 2.1 The Quantum Mechanics of Photon Polarization 9 2.1.1 A Simple Experiment 10 2.1.2 A Quantum Explanation 11 2.2 Single Quantum Bits 13 2.3 Single-Qubit Measurement 16 2.4 A Quantum Key Distribution Protocol 18 2.5 The State Space of a Single-Qubit System 21 2.5.1 Relative Phases versus Global Phases 21 2.5.2 Geometric Views of the State Space of a Single Qubit 23 2.5.3 Comments on General Quantum State Spaces -
Plasma-Surface Interactions and Impact on Electron Energy Distribution Function
Plasma-Surface Interactions and Impact on Electron Energy Distribution Function N. Fox-Lyon(a), N. Ning(b), D.B. Graves(b), V. Godyak(c) and G.S. Oehrlein (a) (a) University of Maryland, College Park (b) University of California, Berkeley (c) RF Plasma Consulting, Brookline, MA Motivation Control of plasma distribution functions (DF): Clarify issues when plasma-surface interactions at plasma boundaries change strongly, e.g. non -reactive vs. reactive discharges and/or surfaces 2 Laboratory for Plasma Processing of Materials Motivation OES MS MS Ion MS Ion Wall Ar/HH22 Plasma Probe Erosion Transport C, CHn Redeposition Si, SiHn’ CHm or SiHm’ Different Surface Carbon or Silicon Surface Modified Surface Real-time Layer ellipsometry (intensity, extent) • Ar/H 2 plasma interacting w/ a-C:H • Characterize impact of surface-generated species on f(v,r,t) • Probe, plasma sampling and OES measurements of f(v,r,t) for modified situations • Characterize surface processes using ellipsometry, and compare results with MD simulations of surface processes • Interpret data by developing overall model 3 Laboratory for Plasma Processing of Materials Wrinkling-induced Surface Roughness Formation Wrinkle wavelength and amplitude calculated using measured using damaged properties vs. AFM derived properties R. L. Bruce, et al., J. Appl. Phys. 107, 084310 (2010) 4 Helium Plasma Pre-Treatment Possible approach: Plasma pretreatment (PPT) UV plasma radiation reduces plane strain modulus E s (chain-scissioning) and densifies without stress before actual PE Helium