Appendix K Survey of Instruction Set Architectures
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
MIPS Architecture
Introduction to the MIPS Architecture January 14–16, 2013 1 / 24 Unofficial textbook MIPS Assembly Language Programming by Robert Britton A beta version of this book (2003) is available free online 2 / 24 Exercise 1 clarification This is a question about converting between bases • bit – base-2 (states: 0 and 1) • flash cell – base-4 (states: 0–3) • hex digit – base-16 (states: 0–9, A–F) • Each hex digit represents 4 bits of information: 0xE ) 1110 • It takes two hex digits to represent one byte: 1010 0111 ) 0xA7 3 / 24 Outline Overview of the MIPS architecture What is a computer architecture? Fetch-decode-execute cycle Datapath and control unit Components of the MIPS architecture Memory Other components of the datapath Control unit 4 / 24 What is a computer architecture? One view: The machine language the CPU implements Instruction set architecture (ISA) • Built in data types (integers, floating point numbers) • Fixed set of instructions • Fixed set of on-processor variables (registers) • Interface for reading/writing memory • Mechanisms to do input/output 5 / 24 What is a computer architecture? Another view: How the ISA is implemented Microarchitecture 6 / 24 How a computer executes a program Fetch-decode-execute cycle (FDX) 1. fetch the next instruction from memory 2. decode the instruction 3. execute the instruction Decode determines: • operation to execute • arguments to use • where the result will be stored Execute: • performs the operation • determines next instruction to fetch (by default, next one) 7 / 24 Datapath and control unit -

Configurable RISC-V Softcore Processor for FPGA Implementation
1 Configurable RISC-V softcore processor for FPGA implementation Joao˜ Filipe Monteiro Rodrigues, Instituto Superior Tecnico,´ Universidade de Lisboa Abstract—Over the past years, the processor market has and development of several programming tools. The RISC-V been dominated by proprietary architectures that implement Foundation controls the RISC-V evolution, and its members instruction sets that require licensing and the payment of fees to are responsible for promoting the adoption of RISC-V and receive permission so they can be used. ARM is an example of one of those companies that sell its microarchitectures to participating in the development of the new ISA. In the list of the manufactures so they can implement them into their own members are big companies like Google, NVIDIA, Western products, and it does not allow the use of its instruction set Digital, Samsung, or Qualcomm. (ISA) in other implementations without licensing. The RISC-V The main goal of this work is the development of a RISC- instruction set appeared proposing the hardware and software V softcore processor to be implemented in an FPGA, using development without costs, through the creation of an open- source ISA. This way, it is possible that any project that im- a non-RISC-V core as the base of this architecture. The plements the RISC-V ISA can be made available open-source or proposed solution is focused on solving the problems and even implemented in commercial products. However, the RISC- limitations identified in the other RISC-V cores that were V solutions that have been developed do not present the needed analyzed in this thesis, especially in terms of the adaptability requirements so they can be included in projects, especially the and flexibility, allowing future modifications according to the research projects, because they offer poor documentation, and their performances are not suitable. -

RISC-V Vector Extension Webinar II
RISC-V Vector Extension Webinar II August 3th, 2021 Thang Tran, Ph.D. Principal Engineer Webinar II - Agenda • Andes overview • Vector technology background – SIMD/vector concept – Vector processor basic • RISC-V V extension ISA – Basic – CSR • RISC-V V extension ISA – Memory operations – Compute instructions • Sample codes – Matrix multiplication – Loads with RVV versions 0.8 and 1.0 • AndesCore™ NX27V • Summary Copyright© 2020 Andes Technology Corp. 2 Terminology • ACE: Andes Custom Extension • ISA: Instruction Set Architecture • CSR: Control and Status Register • GOPS: Giga Operations Per Second • SEW: Element Width (8-64) • GFLOPS: Giga Floating-Point OPS • ELEN: Largest Element Width (32 or 64) • XRF: Integer register file • XLEN: Scalar register length in bits (64) • FRF: Floating-point register file • FLEN: FP register length in bits (16-64) • VRF: Vector register file • VLEN: Vector register length in bits (128-512) • SIMD: Single Instruction Multiple Data • LMUL: Register grouping multiple (1/8-8) • MMX: Multi Media Extension • EMUL: Effective LMUL • SSE: Streaming SIMD Extension • VLMAX/MVL: Vector Length Max • AVX: Advanced Vector Extension • AVL/VL: Application Vector Length • Configurable: parameters are fixed at built time, i.e. cache size • Extensible: added instructions to ISA includes custom instructions to be added by customer • Standard extension: the reserved codes in the ISA for special purposes, i.e. FP, DSP, … • Programmable: parameters can be dynamically changed in the program Copyright© 2020 Andes Technology Corp. 3 RISC-V V Extension ISA Basic Copyright© 2020 Andes Technology Corp. 4 Vector Register ISA • Vector-Register ISA Definition: − All vector operations are between vector registers (except for load and store). -

Schedule 14A Employee Slides Supertex Sunnyvale
UNITED STATES SECURITIES AND EXCHANGE COMMISSION Washington, D.C. 20549 SCHEDULE 14A Proxy Statement Pursuant to Section 14(a) of the Securities Exchange Act of 1934 Filed by the Registrant Filed by a Party other than the Registrant Check the appropriate box: Preliminary Proxy Statement Confidential, for Use of the Commission Only (as permitted by Rule 14a-6(e)(2)) Definitive Proxy Statement Definitive Additional Materials Soliciting Material Pursuant to §240.14a-12 Supertex, Inc. (Name of Registrant as Specified In Its Charter) Microchip Technology Incorporated (Name of Person(s) Filing Proxy Statement, if other than the Registrant) Payment of Filing Fee (Check the appropriate box): No fee required. Fee computed on table below per Exchange Act Rules 14a-6(i)(1) and 0-11. (1) Title of each class of securities to which transaction applies: (2) Aggregate number of securities to which transaction applies: (3) Per unit price or other underlying value of transaction computed pursuant to Exchange Act Rule 0-11 (set forth the amount on which the filing fee is calculated and state how it was determined): (4) Proposed maximum aggregate value of transaction: (5) Total fee paid: Fee paid previously with preliminary materials. Check box if any part of the fee is offset as provided by Exchange Act Rule 0-11(a)(2) and identify the filing for which the offsetting fee was paid previously. Identify the previous filing by registration statement number, or the Form or Schedule and the date of its filing. (1) Amount Previously Paid: (2) Form, Schedule or Registration Statement No.: (3) Filing Party: (4) Date Filed: Filed by Microchip Technology Incorporated Pursuant to Rule 14a-12 of the Securities Exchange Act of 1934 Subject Company: Supertex, Inc. -
The Design and Verification of the Alphastation 600 5-Series Workstation by John H
The Design and Verification of the AlphaStation 600 5-series Workstation by John H. Zurawski, John E. Murray, and Paul J. Lemmon ABSTRACT The AlphaStation 600 5-series workstation is a high-performance, uniprocessor design based on the Alpha 21164 microprocessor and on the PCI bus. Six CMOS ASICs provide high-bandwidth, low-latency interconnects between the CPU, the main memory, and the I/O subsystem. The verification effort used directed, pseudorandom testing on a VERILOG software model. A hardware-based verification technique provided a test throughput that resulted in a significant improvement over software tests. This technique currently involves the use of graphics cards to emulate generic DMA devices. A PCI hardware demon is under development to further enhance the capability of the hardware-based verification. INTRODUCTION The high-performance AlphaStation 600 5-series workstation is based on the fastest Alpha microprocessor to date -- the Alpha 21164.[1] The I/O subsystem uses the 64-bit version of the Peripheral Component Interconnect (PCI) and the Extended Industry Standard Architecture (EISA) bus. The AlphaStation 600 supports three operating systems: Digital UNIX (formerly DEC OSF/1), OpenVMS, and Microsoft's Windows NT. This workstation series uses the DECchip 21171 chip set designed and built by Digital. These chips provide high-bandwidth, low-latency interconnects between the CPU, the main memory, and the PCI bus. This paper describes the architecture and features of the AlphaStation 600 5-series workstation and the DECchip 21171 chip set. The system overview is first presented, followed by a detailed discussion of the chip set. The paper then describes the cache and memory designs, detailing how the memory design evolved from the workstation's requirements. -
The Alpha 21264 Microprocessor: Out-Of-Order Execution at 600 Mhz
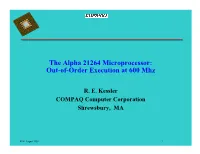
The Alpha 21264 Microprocessor: Out-of-Order Execution at 600 Mhz R. E. Kessler COMPAQ Computer Corporation Shrewsbury, MA REK August 1998 1 Some Highlights z Continued Alpha performance leadership y 600 Mhz operation in 0.35u CMOS6, 6 metal layers, 2.2V y 15 Million transistors, 3.1 cm2, 587 pin PGA y Specint95 of 30+ and Specfp95 of 50+ y Out-of-order and speculative execution y 4-way integer issue y 2-way floating-point issue y Sophisticated tournament branch prediction y High-bandwidth memory system (1+ GB/sec) REK August 1998 2 Alpha 21264: Block Diagram FETCH MAP QUEUE REG EXEC DCACHE Stage: 0 1 2 3 4 5 6 Int Branch Int Reg Exec Predictors Reg Issue File Queue Addr Sys Bus Map (80) Exec (20) L1 Bus 64-bit Data Reg Exec Inter- Cache Bus 80 in-flight instructions File Cache plus 32 loads and 32 stores Addr face 64KB 128-bit (80) Exec Unit Next-Line 2-Set Address Phys Addr 4 Instructions / cycle L1 Ins. 44-bit Cache FP ADD FP Reg 64KB FP Div/Sqrt Issue File Victim 2-Set Reg Queue (72) FP MUL Buffer Map (15) Miss Address REK August 1998 3 Alpha 21264: Block Diagram FETCH MAP QUEUE REG EXEC DCACHE Stage: 0 1 2 3 4 5 6 Int Branch Int Reg Exec Predictors Reg Issue File Queue Addr Sys Bus Map (80) Exec (20) L1 Bus 64-bit Data Reg Exec Inter- Cache Bus 80 in-flight instructions File Cache plus 32 loads and 32 stores Addr face 64KB 128-bit (80) Exec Unit Next-Line 2-Set Address Phys Addr 4 Instructions / cycle L1 Ins. -

ARM Architecture
ARM Architecture Comppgzuter Organization and Assembly ygg Languages Yung-Yu Chuang with slides by Peng-Sheng Chen, Ville Pietikainen ARM history • 1983 developed by Acorn computers – To replace 6502 in BBC computers – 4-man VLSI design team – Its simp lic ity comes from the inexper ience team – Match the needs for generalized SoC for reasonable power, performance and die size – The first commercial RISC implemenation • 1990 ARM (Advanced RISC Mac hine ), owned by Acorn, Apple and VLSI ARM Ltd Design and license ARM core design but not fabricate Why ARM? • One of the most licensed and thus widespread processor cores in the world – Used in PDA, cell phones, multimedia players, handheld game console, digital TV and cameras – ARM7: GBA, iPod – ARM9: NDS, PSP, Sony Ericsson, BenQ – ARM11: Apple iPhone, Nokia N93, N800 – 90% of 32-bit embedded RISC processors till 2009 • Used especially in portable devices due to its low power consumption and reasonable performance ARM powered products ARM processors • A simple but powerful design • A whlhole filfamily of didesigns shiharing siilimilar didesign principles and a common instruction set Naming ARM •ARMxyzTDMIEJFS – x: series – y: MMU – z: cache – T: Thumb – D: debugger – M: Multiplier – I: EmbeddedICE (built-in debugger hardware) – E: Enhanced instruction – J: Jazell e (JVM) – F: Floating-point – S: SthiiblSynthesizible version (source code version for EDA tools) Popular ARM architectures •ARM7TDMI – 3 pipe line stages (ft(fetc h/deco de /execu te ) – High code density/low power consumption – One of the most used ARM-version (for low-end systems) – All ARM cores after ARM7TDMI include TDMI even if they do not include TDMI in their labels • ARM9TDMI – Compatible with ARM7 – 5 stages (fe tc h/deco de /execu te /memory /wr ite ) – Separate instruction and data cache •ARM11 ARM family comparison year 1995 1997 1999 2003 ARM is a RISC • RISC: simple but powerful instructions that execute within a single cycle at high clock speed. -

Optimizing Packed String Matching on AVX2 Platform
Optimizing Packed String Matching on AVX2 Platform M. Akif Aydo˘gmu¸s1,2 and M.O˘guzhan Külekci1 1 Informatics Institute, Istanbul Technical University, Istanbul, Turkey [email protected], [email protected] 2 TUBITAK UME, Gebze-Kocaeli, Turkey Abstract. Exact string matching, searching for all occurrences of given pattern P on a text T , is a fundamental issue in computer science with many applica- tions in natural language processing, speech processing, computational biology, information retrieval, intrusion detection systems, data compression, and etc. Speeding up the pattern matching operations benefiting from the SIMD par- allelism has received attention in the recent literature, where the empirical results on previous studies revealed that SIMD parallelism significantly helps, while the performance may even be expected to get automatically enhanced with the ever increasing size of the SIMD registers. In this paper, we provide variants of the previously proposed EPSM and SSEF algorithms, which are orig- inally implemented on Intel SSE4.2 (Streaming SIMD Extensions 4.2 version with 128-bit registers). We tune the new algorithms according to Intel AVX2 platform (Advanced Vector Extensions 2 with 256-bit registers) and analyze the gain in performance with respect to the increasing length of the SIMD registers. Profiling the new algorithms by using the Intel Vtune Amplifier for detecting performance bottlenecks led us to consider the cache friendliness and shared-memory access issues in the AVX2 platform. We applied cache op- timization techniques to overcome the problems particularly addressing the search algorithms based on filtering. Experimental comparison of the new solutions with the previously known-to- be-fast algorithms on small, medium, and large alphabet text files with diverse pattern lengths showed that the algorithms on AVX2 platform optimized cache obliviously outperforms the previous solutions. -

MIPS IV Instruction Set
MIPS IV Instruction Set Revision 3.2 September, 1995 Charles Price MIPS Technologies, Inc. All Right Reserved RESTRICTED RIGHTS LEGEND Use, duplication, or disclosure of the technical data contained in this document by the Government is subject to restrictions as set forth in subdivision (c) (1) (ii) of the Rights in Technical Data and Computer Software clause at DFARS 52.227-7013 and / or in similar or successor clauses in the FAR, or in the DOD or NASA FAR Supplement. Unpublished rights reserved under the Copyright Laws of the United States. Contractor / manufacturer is MIPS Technologies, Inc., 2011 N. Shoreline Blvd., Mountain View, CA 94039-7311. R2000, R3000, R6000, R4000, R4400, R4200, R8000, R4300 and R10000 are trademarks of MIPS Technologies, Inc. MIPS and R3000 are registered trademarks of MIPS Technologies, Inc. The information in this document is preliminary and subject to change without notice. MIPS Technologies, Inc. (MTI) reserves the right to change any portion of the product described herein to improve function or design. MTI does not assume liability arising out of the application or use of any product or circuit described herein. Information on MIPS products is available electronically: (a) Through the World Wide Web. Point your WWW client to: http://www.mips.com (b) Through ftp from the internet site “sgigate.sgi.com”. Login as “ftp” or “anonymous” and then cd to the directory “pub/doc”. (c) Through an automated FAX service: Inside the USA toll free: (800) 446-6477 (800-IGO-MIPS) Outside the USA: (415) 688-4321 (call from a FAX machine) MIPS Technologies, Inc. -
A Developer's Guide to the POWER Architecture
http://www.ibm.com/developerworks/linux/library/l-powarch/ 7/26/2011 10:53 AM English Sign in (or register) Technical topics Evaluation software Community Events A developer's guide to the POWER architecture POWER programming by the book Brett Olsson , Processor architect, IBM Anthony Marsala , Software engineer, IBM Summary: POWER® processors are found in everything from supercomputers to game consoles and from servers to cell phones -- and they all share a common architecture. This introduction to the PowerPC application-level programming model will give you an overview of the instruction set, important registers, and other details necessary for developing reliable, high performing POWER applications and maintaining code compatibility among processors. Date: 30 Mar 2004 Level: Intermediate Also available in: Japanese Activity: 22383 views Comments: The POWER architecture and the application-level programming model are common across all branches of the POWER architecture family tree. For detailed information, see the product user's manuals available in the IBM® POWER Web site technical library (see Resources for a link). The POWER architecture is a Reduced Instruction Set Computer (RISC) architecture, with over two hundred defined instructions. POWER is RISC in that most instructions execute in a single cycle and typically perform a single operation (such as loading storage to a register, or storing a register to memory). The POWER architecture is broken up into three levels, or "books." By segmenting the architecture in this way, code compatibility can be maintained across implementations while leaving room for implementations to choose levels of complexity for price/performances trade-offs. The levels are: Book I. -

M32R Family Software Manual MITSUBISHI 32-BIT SINGLE-CHIP MICROCOMPUTER
To our customers, Old Company Name in Catalogs and Other Documents On April 1st, 2010, NEC Electronics Corporation merged with Renesas Technology Corporation, and Renesas Electronics Corporation took over all the business of both companies. Therefore, although the old company name remains in this document, it is a valid Renesas Electronics document. We appreciate your understanding. Renesas Electronics website: http://www.renesas.com April 1st, 2010 Renesas Electronics Corporation Issued by: Renesas Electronics Corporation (http://www.renesas.com) Send any inquiries to http://www.renesas.com/inquiry. Notice 1. All information included in this document is current as of the date this document is issued. Such information, however, is subject to change without any prior notice. Before purchasing or using any Renesas Electronics products listed herein, please confirm the latest product information with a Renesas Electronics sales office. Also, please pay regular and careful attention to additional and different information to be disclosed by Renesas Electronics such as that disclosed through our website. 2. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. 3. You should not alter, modify, copy, or otherwise misappropriate any Renesas Electronics product, whether in whole or in part. 4. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. -
Computer Organization EECC 550 • Introduction: Modern Computer Design Levels, Components, Technology Trends, Register Transfer Week 1 Notation (RTN)
Computer Organization EECC 550 • Introduction: Modern Computer Design Levels, Components, Technology Trends, Register Transfer Week 1 Notation (RTN). [Chapters 1, 2] • Instruction Set Architecture (ISA) Characteristics and Classifications: CISC Vs. RISC. [Chapter 2] Week 2 • MIPS: An Example RISC ISA. Syntax, Instruction Formats, Addressing Modes, Encoding & Examples. [Chapter 2] • Central Processor Unit (CPU) & Computer System Performance Measures. [Chapter 4] Week 3 • CPU Organization: Datapath & Control Unit Design. [Chapter 5] Week 4 – MIPS Single Cycle Datapath & Control Unit Design. – MIPS Multicycle Datapath and Finite State Machine Control Unit Design. Week 5 • Microprogrammed Control Unit Design. [Chapter 5] – Microprogramming Project Week 6 • Midterm Review and Midterm Exam Week 7 • CPU Pipelining. [Chapter 6] • The Memory Hierarchy: Cache Design & Performance. [Chapter 7] Week 8 • The Memory Hierarchy: Main & Virtual Memory. [Chapter 7] Week 9 • Input/Output Organization & System Performance Evaluation. [Chapter 8] Week 10 • Computer Arithmetic & ALU Design. [Chapter 3] If time permits. Week 11 • Final Exam. EECC550 - Shaaban #1 Lec # 1 Winter 2005 11-29-2005 Computing System History/Trends + Instruction Set Architecture (ISA) Fundamentals • Computing Element Choices: – Computing Element Programmability – Spatial vs. Temporal Computing – Main Processor Types/Applications • General Purpose Processor Generations • The Von Neumann Computer Model • CPU Organization (Design) • Recent Trends in Computer Design/performance • Hierarchy