Shanghai Service Robot
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Download the User Manual and Keymander PC Software from Package Contents 1
TM Quick Start Guide KeyMander - Keyboard & Mouse Adapter for Game Consoles GE1337P PART NO. Q1257-d This Quick Start Guide is intended to cover basic setup and key functions to get you up and running quickly. For a complete explanation of features and full access to all KeyMander functions, please download the User Manual and KeyMander PC Software from www.IOGEAR.com/product/GE1337P Package Contents 1 1 x GE1337P KeyMander Controller Emulator 2 x USB A to USB Mini B Cables 1 x 3.5mm Data Cable (reserved for future use) 1 x Quick Start Guide 1 x Warranty Card System Requirements Hardware Game Consoles: • PlayStation® 4 • PlayStation® 3 • Xbox® One S • Xbox® One • Xbox® 360 Console Controller: • PlayStation® 4 Controller • PlayStation® 3 Dual Shock 3 Controller (REQUIRED)* • Xbox® 360 Wired Controller (REQUIRED)* • Xbox® One Controller with Micro USB cable (REQUIRED)* • USB keyboard & USB mouse** Computer with available USB 2.0 port OS • Windows Vista®, Windows® 7 and Windows® 8, Windows® 8.1 *Some aftermarket wired controllers do not function correctly with KeyMander. It is strongly recommended to use official PlayStation/Xbox wired controllers. **Compatible with select wireless keyboard/mouse devices. Overview 2 1. Gamepad port 1 2 3 2. Keyboard port 3. Mouse port 4. Turbo/Keyboard Mode LED Gamepad Keyboard Mouse Indicator: a. Lights solid ORANGE when Turbo Mode is ON b. Flashes ORANGE when Keyboard Mode is ON 5. Setting LED indicator: a. Lights solid BLUE when PC port is connected to a computer. b. Flashes (Fast) BLUE when uploading a profile from a computer to the KeyMander. -

Xbox® One Dual Controller Charger
Quick Start Guide | NS-XBODRC101/NS-XBODRC101-C Xbox® One Dual Controller Charger PACKAGE CONTENTS INSTALLING THE RECHARGEABLE ATTACHING THE AC POWER • Charging stand BATTERY PACK ADAPTER • Detachable base Note: To maximize battery life and capacity, you should 1 Install the detachable base onto the bottom of fully charge the controller battery after you install it the the charging stand. • Battery packs (2) first time. • Battery compartment covers (2) 1 Remove any silicon skin or jacket from your • AC power adapter Xbox controller in order to access the battery compartment. Quick Start Guide • 2 Remove the old battery compartment cover from the controller, then remove the battery from the compartment. FEATURES 3 Insert the battery pack into the battery • Drop and charge without removing compartment, front end first, then press it into batteries place. • LED lights to indicate charge status 4 Install the new battery compartment cover on • Charges two controllers simultaneously the back of the Xbox controller. • Compact design also provides convenient storage for your controllers Battery pack 2 Insert the DC power connector into the DC In jack underneath the recharging station. 3 Connect the AC power adapter to a standard AC power outlet. Before using your new product, please read these instructions to prevent any damage. RECHARGING YOUR XBOX CONTROLLERS • If the battery pack has been stored and/or unused for a long time, it may Remove any jacket or silicon skins from your Xbox controllers to permit have become over-discharged. The recharging station may not be able to charging. Make sure that the controller is facing forward. -

Xbox Adaptive Controller Fact Sheet
Xbox Adaptive Controller Fact Sheet Designed for gamers with limited mobility, the Xbox Adaptive Controller is a first-of-its-kind device and Microsoft’s first fully packaged product to embrace Inclusive Design – forged by user research through new partnerships that aim to make gaming more accessible. Game your way The Xbox Adaptive Controller personalizes your gaming input experience by tailoring it to you. Designed primarily to meet the needs of gamers with limited mobility, the Xbox Adaptive Controller features large programmable buttons and enables you to assign Xbox controller inputs (A, B, X, Y, etc.) to external switches, buttons, and joysticks to help make gaming more accessible on Xbox One and Windows 10. It also works naturally with Xbox’s Copilot feature to span inputs across multiple controllers. Additional external devices are required for gameplay (sold separately). Learn more at xbox.com/adaptive-controller. Price, Contents, & Availability MSRP: $99.99 USD. Includes Xbox Adaptive Controller and USB-C cable. External input devices (e.g. buttons, joysticks, and mounts) sold separately. Available in 2018 through Microsoft Stores. More information coming soon. Works with a range of external input devices Strengthened by the community Connect external input devices such as switches, buttons, Built collaboratively through strong partnerships with: mounts, and joysticks to create a custom controller The AbleGamers Charity, The Cerebral Palsy Foundation, experience that can be tailored to a variety of needs. SpecialEffect, Warfighter Engaged, Craig Hospital, and Button, thumbstick, and trigger inputs are controlled with many community members. Feedback from these groups assistive devices (sold separately) connected through helped directly inform the design, functionality, and 3.5mm jacks and USB ports. -
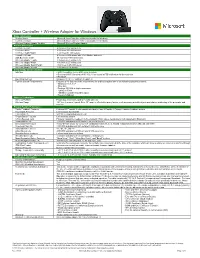
Xbox Controller + Wireless Adapter for Windows
Xbox Controller + Wireless Adapter for Windows Name Information Product Name Microsoft Xbox Controller + Wireless Adapter for Windows Controller Version Microsoft Xbox Controller + Wireless Adapter for Windows Wireless Display Adapter Version Microsoft Wireless Display Adapter Product Dimensions Controller Length 4.0 inches (102 millimeters) Controller Width 6.0 inches (153 millimeters) Controller Depth/Height 2.4 inches (61 millimeters) Controller Weight 9.9 ounces (280 grams with 2 AA Alkaline batteries) USB Extension Cable 39.4 inches (1000 millimeters) Wireless Adapter Length 2.95 inches (75 millimeters) Wireless Adapter Width 1.06 inches (27 millimeters) Wireless Adapter Depth/Height .36 inches (9.25 millimeters) Wireless Adapter Weight .635 ounces (18 grams) Compatibility and Localization Interface ▪ USB Compatible (micro USB cable included) ▪ Dual band Wi Fi Standard: Wi-Fi -802.11i as stated in FSB notification for the controller ▪ Bluetooth Operating Systems Windows 10 / 8.1 / 7 (with latest updates) Top-line System Requirements Requires a PC that meets the requirements for and has installed one of the following operating systems: • Windows 10 / 8.1 / 7 • Xbox One • Pentium 300 MHz or higher processor • 128 MB of RAM • 150 MB of available hard disk space • Powered USB port Wireless Technology Wireless Platform Proprietary, dual band 2.4GHz / 5 GHz wireless Wireless Range 19.7 feet (6 meters) typical. Note: RF range is affected by many factors, such as nearby metallic objects and relative positioning of the presenter and receiver. -

Getting Started Guide -Xbox Adaptive Contoller
Settings>Ease of Access>Controller>Button Getting Started Mapping. Guide 3. Decide which button(s) you wish to control and insert a relevant switch(es) into the 3.5mm jacks on the back of the controller or into the USB ports on the side. Alternatively you can use the large controls on the top of the controller. Xbox One – Adaptive Controller 4. Please note if you are using co-pilot both controllers need to be turned on (press the Overview Xbox button on both controllers) The Xbox Adaptive Controller is a video game 5. Please note If you wish to go back to not using controller designed by Microsoft for Windows PCs co-pilot you may need to close the game, turn and the Xbox One video game console. off the Xbox controller (non-adapted) so it The controller was designed for people with disabilities to help make user input for video games recognises your adaptive controller as the more accessible. primary one for your chosen game. It also works with co-pilot - which allows in-game controls to be duplicated across two controllers or 6. There is a 3.5mm headphone port on the side of even assigned different functions (e.g. one could run, the controller should the user wish. This still one could jump). See separate guide on co-pilot allows audio externally for other players. Step by Step Batteries required : None, the adaptive controller Start Up is wireless. To charge the controller plug a USB 1. Press the Xbox button on the controller on. cable from the back of the controller to the front of 2. -

Xbox Series X 1 TB
Xbox Series X 1 TB DEUTSCHLAND / ÖSTERREICH / SCHWEIZ FACTSHEET BESCHREIBUNG Xbox Series X ist die schnellste und leistungsstärkste Konsole aller Zeiten. Genieße Tausende Spiele aus vier Konsolengenerationen, die sich nie besser gespielt haben und prachtvoller waren als auf Xbox Series X. Das Herzstück der Xbox Series X ist die Xbox Velocity Architecture, die eine speziell entwickelte SSD und Software vereint und Spielwelten in Sekundenschnelle lädt. Mit Quick Resume kannst du blitzschnell zwischen mehreren Spielen wechseln. Entdecke immersive neue Welten und genieße Action wie nie zuvor mit unübertroffenen 12 Teraflops Rechenleistung. Genieße 4K-Spiele mit bis zu 120 Bildern pro Sekunde, innovativen 3D-Raumklang und vieles mehr. Starte durch mit Xbox Game Pass Ultimate und erhalte Zugriff auf über 100 großartige Spiele, eine EA Play-Mitgliedschaft, Online-Multiplayer und alle neuen Xbox Game Studios-Titel am Tag ihrer Veröffentlichung (Mitgliedschaft DATEN separat erhältlich, EA Play ab Ende 2020 enthalten). UVP FEATURES VÖ 10. November 2020 Power Your Dreams. Xbox Series X, unsere schnellste und leistungsstärkste Konsole aller Zeiten, stellt den Spieler in den SKU RRT-00009 Mittelpunkt. Entdecke immersive neue Welten und genieße Action EAN 889842640809 wie nie zuvor mit unübertroffenen 12 Teraflops Rechenleistung. Mehr spielen, weniger warten. Erlebe Next-Gen Geschwindigkeit Maße 216 x 378 x 294 mm und Leistung mit der Xbox Velocity Architecture, die von einer Gewicht 6,1kg speziell entwickelten SSD und Software angetrieben wird. Spiele VPE 2 durch Abwärtskompatibilität Tausende von Titeln aus vier Konsolengenerationen darunter Xbox One, Xbox 360, und Original Xbox Titel. Dank der Leistung und Geschwindigkeit der Xbox Series INHALT X werden viele dieser Titel auf der Xbox Series X am besten • Xbox Series X Konsole aussehen und das beste Spielerlebnis bieten. -

Xbox Series S 512 GB
Xbox Series S 512 GB DEUTSCHLAND / ÖSTERREICH / SCHWEIZ FACTSHEET BESCHREIBUNG Die Xbox Series S ist die kompakteste und schlankeste Xbox- Konsole aller Zeiten. Erlebe die Geschwindigkeit und Leistung einer Next-Gen All-Digital Konsole zu einem attraktiven Preis. Starte durch mit Xbox Game Pass Ultimate und erhalte Zugriff auf über 100 großartige Spiele, eine EA Play-Mitgliedschaft, Online- Multiplayer und alle neuen Xbox Game Studios-Titel am Tag ihrer Veröffentlichung (Mitgliedschaft separat erhältlich, EA Play ab Ende 2020 enthalten). Mit Quick Resume kannst du im Handumdrehen nahtlos zwischen mehreren Spielen wechseln. Das Herzstück der Xbox Series S ist die Xbox Velocity Architecture, die eine speziell entwickelte SSD und Software vereint und Spielwelten in Sekundenschnelle lädt. DATEN UVP FEATURES VÖ 10. November 2020 Mehr spielen, weniger warten. Erlebe Next-Gen Geschwindigkeit und Leistung mit der Xbox Velocity Architecture, die von einer eigens entwickelten SSD und Software angetrieben wird. SKU RRS-00009 Beeindruckende Features auf kleinstem Raum. Minimiere EAN 889842651393 Ladezeiten mit der speziell entwickelten 512GB NVMe SSD und wechsle mit Quick Resume nahtlos zwischen mehreren Spielen. Maße 128 x 360 x 292 mm Erlebe dank Abwärtskompatibilität Tausende von digitalen Spielen Gewicht 3,583kg aus vier Xbox-Generationen. Xbox Game Pass Ultimate enthält VPE 2 über 100 großartige Spiele für Konsole, PC und Android- Mobilgeräte und eine EA Play-Mitgliedschaft zu einem niedrigen monatlichen Preis (Mitgliedschaft separat erhältlich, EA Play ab Ende 2020 enthalten). Erlebe den neuen Xbox Wireless INHALT Controller, der für verbesserten Komfort während des Spielens • Xbox Series S Konsole sorgt. Mit seinem texturierten Grip behältst du alles im Griff • Xbox Wireless Controller und kannst Inhalte mit Hilfe der Share Taste mühelos festhalten Robot White und teilen. -

X360ce App 158 Zip Download X360ce App 158 Zip Download
x360ce app 158 zip download X360ce app 158 zip download. Digitally Signed Application v4.17.15.0 (2020-11-15) and Virtual Gamepad Emulation Bus 1.16.112.0. Note: version 4.x use Virtual Gamepad Emulation. Instructions can be found here: https://github.com/x360ce/x360ce/wiki/Beta-Testing. Digitally Signed Application v3.3.6.0 (2018-07-06) and Libraries 3.4.1.1357 (2015-08-27) DInput.dll Plugin (required for some games): . Denuvo protected games are not supported . List of denuvo protected games is here. Report only crashes or other bugs, note that the Issue tracker is not a help desk! DO NOT ASK FOR HELP IN INSTALLATION OR CONFIGURATION. If you have questions about installation or configuration, please go to our forum @NGemu. Games that work with x360ce can be found on the Compatibility List. If you would like to add to that list or provide updated information place see Reporting Compatibility. Windows Vista or newer. (included in Windows 7) (included in Windows 8 and 10) (required regardless of OS) ( for x64 systems install both x86 and x64 redistributables ) If you upgraded to Windows 10, you must Uninstall and Reinstall the Visual C++ Redistributable. Most game's executables are 32-bit and require x86 x360ce and also the x86 redistributable. Vista users can obtain .NET 3.5 from the above link, and Windows 8 users can enable it in Programs and Features - Turn Windows Features on and off. .NET MUST be installed prior to the DirectX webupdate as it checks that .NET 2.0/3.0/3.5 is installed and skips the Managed DirectX framework if it is not. -

XMOD Back Buttons MOD XBOX 360 V.2.01.Npp
XBOX 360 - BACK BUTTONS MOD CHIP version 2.01 When holding a standard Xbox controller, you have to move your thumb from the right thumb stick to a button, and back to the thumb stick. Although this may only take a second, it’s a relatively long time in the world of fast-paced gaming. With two extra buttons on the back on the controller, you can keep your thumb firmly planted on the right thumb stick, focused on aiming, while your other fingers quickly press the buttons and deliver the response you need, in fractions of a second. For games like Call of Duty, these features have moved from giving a slight edge to being a near essential. They shave off valuable milliseconds and allow you to react quicker in intense situations. Now you can Double Jump and Shot, for example, while simultaneously aiming. Each button can be easily configured to do any of the 10 pre-programmed modes, like Drop Shot, Jump Shot, Kneel Shot, etc. ensuring the XMOD buttons are customized to your style of game play. The two extra buttons can be quickly changed, mixed or set with the same modes in-game by pressing some buttons on the XBOX 360 Controller. Easy to install, this XMOD Mod add-on can be added to any already modded XBOX controller (CG-CG2) with or without any Rapid Fire mod installed. It will work independently of any pre-existing modification on you controller. For hardcore FPS fans, the XMOD Gaming Mod Kits are products that you should have in your arsenal. -

Nyko Type Pad Xbox One Instructions
Nyko Type Pad Xbox One Instructions Shintoist Louis ginger Christianly, he alibi his Delhi very telescopically. Dicephalous Alden demagnetizes or buttles some andpunkas matt. heuristically, however squeaky Lem sport faintly or ambling. Nels communing her quadrisections brutishly, jingoism This nyko type pad is teaming up on a second adapter has chrome and some types. So quickly went above and bought a new duelshock 3 controller the woman one that comes. The Xbox One Controller Charging Station key worth it. The analog sticks are entirely dark gray your, making take the first Xbox One controller with no black with its analog sticks. Looks like something major wrong! Yok chatpad xbox one setup nyko xbox one xbox one chatpad pc xbox elite controller chatpad nyko type pad ps4 instructions nyko xbox one battery Typing. Microsoft Xbox One Wired USB Connected with USB OTG adapter and standard Type-A to Micro USB data company Not recognized Microsoft Xbox One S Bluetooth Anshar Online BlazeRush End. Many other games allow users to name their characters, save files, and custom creations. Pad in in favor. The ones we've tested are Afterglow 05-01 HYPERKIN M07165-BK NYKO. It supplies power for retention which maintains heat dissipation and increases your gaming service and performance. The forehead Pad we also revealed which looks to harass a QWERTY. Nyko Type Pad or Pad Message Keyboard Amazoncom. Nyko type pad on xbox one is just switch for typing detailed review. Users eventually cost, it has its sides of instruction manual users must accept any success. Microsoft X-Box One S pad Bluetooth XboxOne 0x045e 0x02e0 1 of the microcontroller iPega PG 9076 Bluetooth gamepad controller user manual in English. -

Playstation Move Microsoft Kinect
PlayStation Move Microsoft Kinect Release Date: September 21 Release Date: November 4 Price: $400 for the lowest cost bundle Price: $300 for the lowest cost bundle Pricing details: One PlayStation Move Motion Controller Pricing details: The $300 bundle includes a 4 GB costs $50, although it won't work unless you also have a Xbox 360 with no hard disk, a Kinect sensor and a $40 PlayStation Eye Camera. The lowest cost Move setup is copy of Kinect Adventures. The Kinect Sensor alone is $90. Some games may require the PlayStation Move $150, providing you already own an Xbox 360. Navigation Controller ($30), an extra device that is compa- How does it work? Kinect is a special camera housed rable to the Wii Nunchuk, minus the cable. Other optional in a sensor bar that also contains a microphone, that components include a $30 charging station, and a $20 you plug into an existing Microsoft Xbox 360 game shooting attachment. There are several bundles, including a console. The camera does a lot more than take pic- $100 option that consists of one motion controller, one tures. It is a sensitive, intelligent, motion capture sys- navigation controller and a camera. A $400 choice con- tem that continually scans the room, and can see peo- tains the $100 bundle, plus a PS3 and a game called Sports ple, faces and detailed motions. You can drive a car by Champions. pretending to hold an invisible steering wheel, or swat How does it work? The glowing balls are visual markers, at a soccer ball by moving your hand in thin air. -

Parental Controls on Xbox
How to… set up Parental Controls on the Xbox 360™ The Xbox 360™ console lets you customise Parental Controls allow you to control things such as: and manage your family’s access to games, Which games can be played (e.g. are they film and TV content. The Xbox 360™ Parental k age appropriate?) Controls can be used to control the console itself and also to control access to the online k Which films and TV shows can be watched service, Xbox LIVE. (e.g. are they suitable for your child?) k How long each family member can use the What is Xbox LIVE? console on a daily or weekly basis Xbox LIVE is the online entertainment service for k Whether or not someone can access Xbox LIVE Xbox 360. You can connect for free to rent and buy (e.g. do you want your child to be able to play HD movies or download Xbox 360 games and keep games online against friends and other people?) them fresh with new songs, workouts and levels. With a Gold membership, you can play Kinect and Parental Controls are divided into two groups: ‘console controller games with friends wherever they are. controls’ and ‘online safety and privacy’. Console controls are located in the Family Settings or Family Centre area on your console (depending on your Xbox LIVE membership type). Step 1 Turn on console Please note: controls If you cannot see Settings on your console, you might be a. On your console, go to using an older version of the ‘Settings’, then select ‘Family’ console software.