Raspberry Pi Pico C/C++ SDK
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Origin of the Peculiarities of the Vietnamese Alphabet André-Georges Haudricourt
The origin of the peculiarities of the Vietnamese alphabet André-Georges Haudricourt To cite this version: André-Georges Haudricourt. The origin of the peculiarities of the Vietnamese alphabet. Mon-Khmer Studies, 2010, 39, pp.89-104. halshs-00918824v2 HAL Id: halshs-00918824 https://halshs.archives-ouvertes.fr/halshs-00918824v2 Submitted on 17 Dec 2013 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Published in Mon-Khmer Studies 39. 89–104 (2010). The origin of the peculiarities of the Vietnamese alphabet by André-Georges Haudricourt Translated by Alexis Michaud, LACITO-CNRS, France Originally published as: L’origine des particularités de l’alphabet vietnamien, Dân Việt Nam 3:61-68, 1949. Translator’s foreword André-Georges Haudricourt’s contribution to Southeast Asian studies is internationally acknowledged, witness the Haudricourt Festschrift (Suriya, Thomas and Suwilai 1985). However, many of Haudricourt’s works are not yet available to the English-reading public. A volume of the most important papers by André-Georges Haudricourt, translated by an international team of specialists, is currently in preparation. Its aim is to share with the English- speaking academic community Haudricourt’s seminal publications, many of which address issues in Southeast Asian languages, linguistics and social anthropology. -
Executable Code Is Not the Proper Subject of Copyright Law a Retrospective Criticism of Technical and Legal Naivete in the Apple V
Executable Code is Not the Proper Subject of Copyright Law A retrospective criticism of technical and legal naivete in the Apple V. Franklin case Matthew M. Swann, Clark S. Turner, Ph.D., Department of Computer Science Cal Poly State University November 18, 2004 Abstract: Copyright was created by government for a purpose. Its purpose was to be an incentive to produce and disseminate new and useful knowledge to society. Source code is written to express its underlying ideas and is clearly included as a copyrightable artifact. However, since Apple v. Franklin, copyright has been extended to protect an opaque software executable that does not express its underlying ideas. Common commercial practice involves keeping the source code secret, hiding any innovative ideas expressed there, while copyrighting the executable, where the underlying ideas are not exposed. By examining copyright’s historical heritage we can determine whether software copyright for an opaque artifact upholds the bargain between authors and society as intended by our Founding Fathers. This paper first describes the origins of copyright, the nature of software, and the unique problems involved. It then determines whether current copyright protection for the opaque executable realizes the economic model underpinning copyright law. Having found the current legal interpretation insufficient to protect software without compromising its principles, we suggest new legislation which would respect the philosophy on which copyright in this nation was founded. Table of Contents INTRODUCTION................................................................................................. 1 THE ORIGIN OF COPYRIGHT ........................................................................... 1 The Idea is Born 1 A New Beginning 2 The Social Bargain 3 Copyright and the Constitution 4 THE BASICS OF SOFTWARE .......................................................................... -

The LLVM Instruction Set and Compilation Strategy
The LLVM Instruction Set and Compilation Strategy Chris Lattner Vikram Adve University of Illinois at Urbana-Champaign lattner,vadve ¡ @cs.uiuc.edu Abstract This document introduces the LLVM compiler infrastructure and instruction set, a simple approach that enables sophisticated code transformations at link time, runtime, and in the field. It is a pragmatic approach to compilation, interfering with programmers and tools as little as possible, while still retaining extensive high-level information from source-level compilers for later stages of an application’s lifetime. We describe the LLVM instruction set, the design of the LLVM system, and some of its key components. 1 Introduction Modern programming languages and software practices aim to support more reliable, flexible, and powerful software applications, increase programmer productivity, and provide higher level semantic information to the compiler. Un- fortunately, traditional approaches to compilation either fail to extract sufficient performance from the program (by not using interprocedural analysis or profile information) or interfere with the build process substantially (by requiring build scripts to be modified for either profiling or interprocedural optimization). Furthermore, they do not support optimization either at runtime or after an application has been installed at an end-user’s site, when the most relevant information about actual usage patterns would be available. The LLVM Compilation Strategy is designed to enable effective multi-stage optimization (at compile-time, link-time, runtime, and offline) and more effective profile-driven optimization, and to do so without changes to the traditional build process or programmer intervention. LLVM (Low Level Virtual Machine) is a compilation strategy that uses a low-level virtual instruction set with rich type information as a common code representation for all phases of compilation. -
Studying the Real World Today's Topics
Studying the real world Today's topics Free and open source software (FOSS) What is it, who uses it, history Making the most of other people's software Learning from, using, and contributing Learning about your own system Using tools to understand software without source Free and open source software Access to source code Free = freedom to use, modify, copy Some potential benefits Can build for different platforms and needs Development driven by community Different perspectives and ideas More people looking at the code for bugs/security issues Structure Volunteers, sponsored by companies Generally anyone can propose ideas and submit code Different structures in charge of what features/code gets in Free and open source software Tons of FOSS out there Nearly everything on myth Desktop applications (Firefox, Chromium, LibreOffice) Programming tools (compilers, libraries, IDEs) Servers (Apache web server, MySQL) Many companies contribute to FOSS Android core Apple Darwin Microsoft .NET A brief history of FOSS 1960s: Software distributed with hardware Source included, users could fix bugs 1970s: Start of software licensing 1974: Software is copyrightable 1975: First license for UNIX sold 1980s: Popularity of closed-source software Software valued independent of hardware Richard Stallman Started the free software movement (1983) The GNU project GNU = GNU's Not Unix An operating system with unix-like interface GNU General Public License Free software: users have access to source, can modify and redistribute Must share modifications under same -
Chapter 1 Introduction to Computers, Programs, and Java
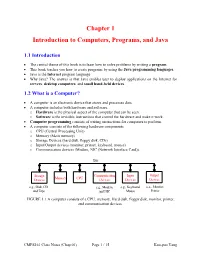
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -

1 Curl and Divergence
Sections 15.5-15.8: Divergence, Curl, Surface Integrals, Stokes' and Divergence Theorems Reeve Garrett 1 Curl and Divergence Definition 1.1 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the divergence of F on D is @ @ @ div F := r · F = ; ; · hf; g; hi = f + g + h ; @x @y @z x y z @ @ @ where r = h @x ; @y ; @z i is the del operator. If div F = 0, we say that F is source free. Note that these definitions (divergence and source free) completely agrees with their 2D analogues in 15.4. Theorem 1.2 Suppose that F is a radial vector field, i.e. if r = hx; y; zi, then for some real number p, r hx;y;zi 3−p F = jrjp = (x2+y2+z2)p=2 , then div F = jrjp . Theorem 1.3 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the curl of F on D is curl F := r × F = hhy − gz; fz − hx; gx − fyi: If curl F = 0, then we say F is irrotational. Note that gx − fy is the 2D curl as defined in section 15.4. Therefore, if we fix a point (a; b; c), [gx − fy](a; b; c), measures the rotation of F at the point (a; b; c) in the plane z = c. Similarly, [hy − gz](a; b; c) measures the rotation of F in the plane x = a at (a; b; c), and [fz − hx](a; b; c) measures the rotation of F in the plane y = b at the point (a; b; c). -

C Programming Language Review
C Programming Language Review Embedded Systems 1 C: A High-Level Language Gives symbolic names to values – don’t need to know which register or memory location Provides abstraction of underlying hardware – operations do not depend on instruction set – example: can write “a = b * c”, even if CPU doesn’t have a multiply instruction Provides expressiveness – use meaningful symbols that convey meaning – simple expressions for common control patterns (if-then-else) Enhances code readability Safeguards against bugs – can enforce rules or conditions at compile-time or run-time Embedded Systems 2 A C Code “Project” • You will use an “Integrated Development Environment” (IDE) to develop, compile, load, and debug your code. • Your entire code package is called a project. Often you create several files to spilt the functionality: – Several C files – Several include (.h) files – Maybe some assembly language (.a30) files – Maybe some assembly language include (.inc) files • A lab, like “Lab7”, will be your project. You may have three .c, three .h, one .a30, and one .inc files. • More will be discussed in a later set of notes. Embedded Systems 3 Compiling a C Program C Source and Entire mechanism is usually called Header Files the “compiler” Preprocessor – macro substitution C Preprocessor – conditional compilation – “source-level” transformations • output is still C Compiler Source Code Compiler Analysis – generates object file Symbol Table Target Code • machine instructions Synthesis Linker – combine object files Library (including libraries) Linker into executable image Object Files Executable Image Embedded Systems 4 Compiler Source Code Analysis – “front end” – parses programs to identify its pieces • variables, expressions, statements, functions, etc. -

The Interplay of Compile-Time and Run-Time Options for Performance Prediction Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel
The Interplay of Compile-time and Run-time Options for Performance Prediction Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel To cite this version: Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel. The Interplay of Compile-time and Run-time Options for Performance Prediction. SPLC 2021 - 25th ACM Inter- national Systems and Software Product Line Conference - Volume A, Sep 2021, Leicester, United Kingdom. pp.1-12, 10.1145/3461001.3471149. hal-03286127 HAL Id: hal-03286127 https://hal.archives-ouvertes.fr/hal-03286127 Submitted on 15 Jul 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. The Interplay of Compile-time and Run-time Options for Performance Prediction Luc Lesoil, Mathieu Acher, Xhevahire Tërnava, Arnaud Blouin, Jean-Marc Jézéquel Univ Rennes, INSA Rennes, CNRS, Inria, IRISA Rennes, France [email protected] ABSTRACT Both compile-time and run-time options can be configured to reach Many software projects are configurable through compile-time op- specific functional and performance goals. tions (e.g., using ./configure) and also through run-time options (e.g., Existing studies consider either compile-time or run-time op- command-line parameters, fed to the software at execution time). -

Ffontiau Cymraeg
This publication is available in other languages and formats on request. Mae'r cyhoeddiad hwn ar gael mewn ieithoedd a fformatau eraill ar gais. [email protected] www.caerphilly.gov.uk/equalities How to type Accented Characters This guidance document has been produced to provide practical help when typing letters or circulars, or when designing posters or flyers so that getting accents on various letters when typing is made easier. The guide should be used alongside the Council’s Guidance on Equalities in Designing and Printing. Please note this is for PCs only and will not work on Macs. Firstly, on your keyboard make sure the Num Lock is switched on, or the codes shown in this document won’t work (this button is found above the numeric keypad on the right of your keyboard). By pressing the ALT key (to the left of the space bar), holding it down and then entering a certain sequence of numbers on the numeric keypad, it's very easy to get almost any accented character you want. For example, to get the letter “ô”, press and hold the ALT key, type in the code 0 2 4 4, then release the ALT key. The number sequences shown from page 3 onwards work in most fonts in order to get an accent over “a, e, i, o, u”, the vowels in the English alphabet. In other languages, for example in French, the letter "c" can be accented and in Spanish, "n" can be accented too. Many other languages have accents on consonants as well as vowels. -

Design and Implementation of Generics for the .NET Common Language Runtime
Design and Implementation of Generics for the .NET Common Language Runtime Andrew Kennedy Don Syme Microsoft Research, Cambridge, U.K. fakeÒÒ¸d×ÝÑeg@ÑicÖÓ×ÓfغcÓÑ Abstract cally through an interface definition language, or IDL) that is nec- essary for language interoperation. The Microsoft .NET Common Language Runtime provides a This paper describes the design and implementation of support shared type system, intermediate language and dynamic execution for parametric polymorphism in the CLR. In its initial release, the environment for the implementation and inter-operation of multiple CLR has no support for polymorphism, an omission shared by the source languages. In this paper we extend it with direct support for JVM. Of course, it is always possible to “compile away” polymor- parametric polymorphism (also known as generics), describing the phism by translation, as has been demonstrated in a number of ex- design through examples written in an extended version of the C# tensions to Java [14, 4, 6, 13, 2, 16] that require no change to the programming language, and explaining aspects of implementation JVM, and in compilers for polymorphic languages that target the by reference to a prototype extension to the runtime. JVM or CLR (MLj [3], Haskell, Eiffel, Mercury). However, such Our design is very expressive, supporting parameterized types, systems inevitably suffer drawbacks of some kind, whether through polymorphic static, instance and virtual methods, “F-bounded” source language restrictions (disallowing primitive type instanti- type parameters, instantiation at pointer and value types, polymor- ations to enable a simple erasure-based translation, as in GJ and phic recursion, and exact run-time types. -

Medical Terminology Abbreviations Medical Terminology Abbreviations
34 MEDICAL TERMINOLOGY ABBREVIATIONS MEDICAL TERMINOLOGY ABBREVIATIONS The following list contains some of the most common abbreviations found in medical records. Please note that in medical terminology, the capitalization of letters bears significance as to the meaning of certain terms, and is often used to distinguish terms with similar acronyms. @—at A & P—anatomy and physiology ab—abortion abd—abdominal ABG—arterial blood gas a.c.—before meals ac & cl—acetest and clinitest ACLS—advanced cardiac life support AD—right ear ADL—activities of daily living ad lib—as desired adm—admission afeb—afebrile, no fever AFB—acid-fast bacillus AKA—above the knee alb—albumin alt dieb—alternate days (every other day) am—morning AMA—against medical advice amal—amalgam amb—ambulate, walk AMI—acute myocardial infarction amt—amount ANS—automatic nervous system ant—anterior AOx3—alert and oriented to person, time, and place Ap—apical AP—apical pulse approx—approximately aq—aqueous ARDS—acute respiratory distress syndrome AS—left ear ASA—aspirin asap (ASAP)—as soon as possible as tol—as tolerated ATD—admission, transfer, discharge AU—both ears Ax—axillary BE—barium enema bid—twice a day bil, bilateral—both sides BK—below knee BKA—below the knee amputation bl—blood bl wk—blood work BLS—basic life support BM—bowel movement BOW—bag of waters B/P—blood pressure bpm—beats per minute BR—bed rest MEDICAL TERMINOLOGY ABBREVIATIONS 35 BRP—bathroom privileges BS—breath sounds BSI—body substance isolation BSO—bilateral salpingo-oophorectomy BUN—blood, urea, nitrogen -

Section “Common Predefined Macros” in the C Preprocessor
The C Preprocessor For gcc version 12.0.0 (pre-release) (GCC) Richard M. Stallman, Zachary Weinberg Copyright c 1987-2021 Free Software Foundation, Inc. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.3 or any later version published by the Free Software Foundation. A copy of the license is included in the section entitled \GNU Free Documentation License". This manual contains no Invariant Sections. The Front-Cover Texts are (a) (see below), and the Back-Cover Texts are (b) (see below). (a) The FSF's Front-Cover Text is: A GNU Manual (b) The FSF's Back-Cover Text is: You have freedom to copy and modify this GNU Manual, like GNU software. Copies published by the Free Software Foundation raise funds for GNU development. i Table of Contents 1 Overview :::::::::::::::::::::::::::::::::::::::: 1 1.1 Character sets:::::::::::::::::::::::::::::::::::::::::::::::::: 1 1.2 Initial processing ::::::::::::::::::::::::::::::::::::::::::::::: 2 1.3 Tokenization ::::::::::::::::::::::::::::::::::::::::::::::::::: 4 1.4 The preprocessing language :::::::::::::::::::::::::::::::::::: 6 2 Header Files::::::::::::::::::::::::::::::::::::: 7 2.1 Include Syntax ::::::::::::::::::::::::::::::::::::::::::::::::: 7 2.2 Include Operation :::::::::::::::::::::::::::::::::::::::::::::: 8 2.3 Search Path :::::::::::::::::::::::::::::::::::::::::::::::::::: 9 2.4 Once-Only Headers::::::::::::::::::::::::::::::::::::::::::::: 9 2.5 Alternatives to Wrapper #ifndef ::::::::::::::::::::::::::::::