A Randomized Algorithm for Triangulating a Simple Polygon in Linear Time∗
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Studies on Kernels of Simple Polygons
UNLV Theses, Dissertations, Professional Papers, and Capstones 5-1-2020 Studies on Kernels of Simple Polygons Jason Mark Follow this and additional works at: https://digitalscholarship.unlv.edu/thesesdissertations Part of the Computer Sciences Commons Repository Citation Mark, Jason, "Studies on Kernels of Simple Polygons" (2020). UNLV Theses, Dissertations, Professional Papers, and Capstones. 3923. http://dx.doi.org/10.34917/19412121 This Thesis is protected by copyright and/or related rights. It has been brought to you by Digital Scholarship@UNLV with permission from the rights-holder(s). You are free to use this Thesis in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you need to obtain permission from the rights-holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/ or on the work itself. This Thesis has been accepted for inclusion in UNLV Theses, Dissertations, Professional Papers, and Capstones by an authorized administrator of Digital Scholarship@UNLV. For more information, please contact [email protected]. STUDIES ON KERNELS OF SIMPLE POLYGONS By Jason A. Mark Bachelor of Science - Computer Science University of Nevada, Las Vegas 2004 A thesis submitted in partial fulfillment of the requirements for the Master of Science - Computer Science Department of Computer Science Howard R. Hughes College of Engineering The Graduate College University of Nevada, Las Vegas May 2020 © Jason A. Mark, 2020 All Rights Reserved Thesis Approval The Graduate College The University of Nevada, Las Vegas April 2, 2020 This thesis prepared by Jason A. -

Simple Polygons Scribe: Michael Goldwasser
CS268: Geometric Algorithms Handout #5 Design and Analysis Original Handout #15 Stanford University Tuesday, 25 February 1992 Original Lecture #6: 28 January 1991 Topics: Triangulating Simple Polygons Scribe: Michael Goldwasser Algorithms for triangulating polygons are important tools throughout computa- tional geometry. Many problems involving polygons are simplified by partitioning the complex polygon into triangles, and then working with the individual triangles. The applications of such algorithms are well documented in papers involving visibility, motion planning, and computer graphics. The following notes give an introduction to triangulations and many related definitions and basic lemmas. Most of the definitions are based on a simple polygon, P, containing n edges, and hence n vertices. However, many of the definitions and results can be extended to a general arrangement of n line segments. 1 Diagonals Definition 1. Given a simple polygon, P, a diagonal is a line segment between two non-adjacent vertices that lies entirely within the interior of the polygon. Lemma 2. Every simple polygon with jPj > 3 contains a diagonal. Proof: Consider some vertex v. If v has a diagonal, it’s party time. If not then the only vertices visible from v are its neighbors. Therefore v must see some single edge beyond its neighbors that entirely spans the sector of visibility, and therefore v must be a convex vertex. Now consider the two neighbors of v. Since jPj > 3, these cannot be neighbors of each other, however they must be visible from each other because of the above situation, and thus the segment connecting them is indeed a diagonal. -

Maximum-Area Rectangles in a Simple Polygon∗
Maximum-Area Rectangles in a Simple Polygon∗ Yujin Choiy Seungjun Leez Hee-Kap Ahnz Abstract We study the problem of finding maximum-area rectangles contained in a polygon in the plane. There has been a fair amount of work for this problem when the rectangles have to be axis-aligned or when the polygon is convex. We consider this problem in a simple polygon with n vertices, possibly with holes, and with no restriction on the orientation of the rectangles. We present an algorithm that computes a maximum-area rectangle in O(n3 log n) time using O(kn2) space, where k is the number of reflex vertices of P . Our algorithm can report all maximum-area rectangles in the same time using O(n3) space. We also present a simple algorithm that finds a maximum-area rectangle contained in a convex polygon with n vertices in O(n3) time using O(n) space. 1 Introduction Computing a largest figure of a certain prescribed shape contained in a container is a fundamental and important optimization problem in pattern recognition, computer vision and computational geometry. There has been a fair amount of work for finding rectangles of maximum area contained in a convex polygon P with n vertices in the plane. Amenta showed that an axis-aligned rectangle of maximum area can be found in linear time by phrasing it as a convex programming problem [3]. Assuming that the vertices are given in order along the boundary of P , stored in an array or balanced binary search tree in memory, Fischer and Höffgen gave O(log2 n)-time algorithm for finding an axis-aligned rectangle of maximum area contained in P [9]. -
University of Houston – Math Contest Project Problem, 2012 Simple Equilateral Polygons and Regular Polygonal Wheels School
University of Houston – Math Contest Project Problem, 2012 Simple Equilateral Polygons and Regular Polygonal Wheels School Name: _____________________________________ Team Members The Project is due at 8:30am (during onsite registration) on the day of the contest. Each project will be judged for precision, presentation, and creativity. Place the team solution in a folder with this page as the cover page, a table of contents, and the solutions. Solve as many of the problems as possible. A polygon is said to be simple if its boundary does not cross itself. A polygon is equilateral if all of its sides have the same length. The sides of a polygon are line segments joining particular vertices of the polygon, and quite often, it is necessary to specify the vertices of a polygon, even if a figure is given. For example, consider the simple polygon shown below. In the absence of additional information, we naturally assume that this simple polygon has 4 vertices and 4 sides. However, it is possible that there are more vertices and sides. Consider the two views below of figures with the same shape, with the vertices showing. The first of these has an additional vertex, and consequently an additional side (it really is possible for 2 sides to be adjacent and collinear). For this reason, whenever referring to a simple polygon, we will either clearly plot the vertices, or list them. We assume the reader understands the difference between the interior and the exterior of a simple polygon, as well as the idea of traversing the boundary of a simple polygon in a counter- clockwise orientation . -

Areas and Shapes of Planar Irregular Polygons
Forum Geometricorum b Volume 18 (2018) 17–36. b b FORUM GEOM ISSN 1534-1178 Areas and Shapes of Planar Irregular Polygons C. E. Garza-Hume, Maricarmen C. Jorge, and Arturo Olvera Abstract. We study analytically and numerically the possible shapes and areas of planar irregular polygons with prescribed side-lengths. We give an algorithm and a computer program to construct the cyclic configuration with its circum- circle and hence the maximum possible area. We study quadrilaterals with a self-intersection and prove that not all area minimizers are cyclic. We classify quadrilaterals into four classes related to the possibility of reversing orientation by deforming continuously. We study the possible shapes of polygons with pre- scribed side-lengths and prescribed area. In this paper we carry out an analytical and numerical study of the possible shapes and areas of general planar irregular polygons with prescribed side-lengths. We explain a way to construct the shape with maximum area, which is known to be the cyclic configuration. We write a transcendental equation whose root is the radius of the circumcircle and give an algorithm to compute the root. We provide an algorithm and a corresponding computer program that actually computes the circumcircle and draws the shape with maximum area, which can then be deformed as needed. We study quadrilaterals with a self-intersection, which are the ones that achieve minimum area and we prove that area minimizers are not necessarily cyclic, as mentioned in the literature ([4]). We also study the possible shapes of polygons with prescribed side-lengths and prescribed area. -

A Linear Time Algorithm for the Minimum Area Rectangle Enclosing a Convex Polygon
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Purdue E-Pubs Purdue University Purdue e-Pubs Department of Computer Science Technical Reports Department of Computer Science 1983 A Linear Time Algorithm for the Minimum Area Rectangle Enclosing a Convex Polygon Dennis S. Arnon John P. Gieselmann Report Number: 83-463 Arnon, Dennis S. and Gieselmann, John P., "A Linear Time Algorithm for the Minimum Area Rectangle Enclosing a Convex Polygon" (1983). Department of Computer Science Technical Reports. Paper 382. https://docs.lib.purdue.edu/cstech/382 This document has been made available through Purdue e-Pubs, a service of the Purdue University Libraries. Please contact [email protected] for additional information. 1 A LINEAR TIME ALGORITHM FOR THE MINIMUM AREA RECfANGLE ENCLOSING A CONVEX POLYGON by Dennis S. Amon Computer Science Department Purdue University West Lafayette, Indiana 479Cf7 John P. Gieselmann Computer Science Department Purdue University West Lafayette, Indiana 47907 Technical Report #463 Computer Science Department - Purdue University December 7, 1983 ABSTRACT We give an 0 (n) algorithm for constructing the rectangle of minimum area enclosing an n-vcrtex convex polygon. Keywords: computational geometry, geomelric approximation, minimum area rectangle, enclosing rectangle, convex polygons, space planning. 2 1. introduction. The problem of finding a rectangle of minimal area that encloses a given polygon arises, for example, in algorithms for the cutting stock problem and the template layout problem (see e.g [4} and rID. In a previous paper, Freeman and Shapira [2] show that the minimum area enclosing rectangle ~or an arbitrary (simple) polygon P is the minimum area enclosing rectangle Rp of its convex hull. -

30 POLYGONS Joseph O’Rourke, Subhash Suri, and Csaba D
30 POLYGONS Joseph O'Rourke, Subhash Suri, and Csaba D. T´oth INTRODUCTION Polygons are one of the fundamental building blocks in geometric modeling, and they are used to represent a wide variety of shapes and figures in computer graph- ics, vision, pattern recognition, robotics, and other computational fields. By a polygon we mean a region of the plane enclosed by a simple cycle of straight line segments; a simple cycle means that nonadjacent segments do not intersect and two adjacent segments intersect only at their common endpoint. This chapter de- scribes a collection of results on polygons with both combinatorial and algorithmic flavors. After classifying polygons in the opening section, Section 30.2 looks at sim- ple polygonizations, Section 30.3 covers polygon decomposition, and Section 30.4 polygon intersection. Sections 30.5 addresses polygon containment problems and Section 30.6 touches upon a few miscellaneous problems and results. 30.1 POLYGON CLASSIFICATION Polygons can be classified in several different ways depending on their domain of application. In chip-masking applications, for instance, the most commonly used polygons have their sides parallel to the coordinate axes. GLOSSARY Simple polygon: A closed region of the plane enclosed by a simple cycle of straight line segments. Convex polygon: The line segment joining any two points of the polygon lies within the polygon. Monotone polygon: Any line orthogonal to the direction of monotonicity inter- sects the polygon in a single connected piece. Star-shaped polygon: The entire polygon is visible from some point inside the polygon. Orthogonal polygon: A polygon with sides parallel to the (orthogonal) coordi- nate axes. -

Quadrilateral Meshing by Circle Packing
Quadrilateral Meshing by Circle Packing Marshall Bern 1 David Eppstein 2 Abstract We use circle-packing methods to generate quadrilateral meshes for polygonal domains, with guaranteed bounds both on the quality and the number of elements. We show that these methods can generate meshes of several types: (1) the elements form the cells of a VoronoÈõ diagram, (2) all elements have two opposite 90± angles, (3) all elements are kites, or (4) all angles are at most 120±. In each case the total number of elements is O.n/, where n is the number of input vertices. 1 Introduction We investigate here problems of unstructured quadrilateral mesh generation for polygonal domains, with two con¯icting requirements. First, we require there to be few quadrilaterals, linear in the number of input vertices; this is appropriate for methods in which high order basis functions are used, or in multiblock grid generation in which each quadrilateral is to be further subdivided into a structured mesh. Second, we require some guarantees on the quality of the mesh: either the elements themselves should have shapes restricted to certain classes of quadrilaterals, or the mesh should satisfy some more global quality requirements. Computing a linear-size quadrilateralization, without regard for quality, is quite easy. One can ®nd quadrilateral meshes with few elements, for instance, by triangulating the domain and subdividing each triangle into three quadrilaterals [13]. For convex domains, it is possible to exactly minimize the num- ber of elements [11]. However these methods may produce very poor quality meshes. High-quality quadrilateralization, without rigorous bounds on the number of elements, is an area of active practical interest. -

OPTIMAL TRIANGULATION of POLYGONS 1. Introduction It Is a Problem of Long-Standing Theoretical and Practical Interest to Triangu
OPTIMAL TRIANGULATION OF POLYGONS CHRISTOPHER J. BISHOP Abstract. We show that any simple polygon P with minimal interior angle θ has a triangulation with all angles in the interval I =[θ, 90◦ −min(36◦,θ)/2], and these bounds are sharp. Moreover, we give a method of computing the optimal upper and lower angle bounds for acutely triangulating any simple polygon P , show that these bounds are actually attained (except in one special case), and prove that the optimal bounds for triangulations are the same as for triangular dissections. The latter verifies, in a stronger form, a 1984 conjecture of Gerver. 1. Introduction It is a problem of long-standing theoretical and practical interest to triangulate a polygon with the best possible bounds on the angles used. For example, the con- strained Delaunay triangulation famously maximizes the minimal angle if no addi- tional vertices (called Steiner points) are allowed [30], [31], and algorithms for min- imizing the maximum angle are given in [4] and [20]. If we allow Steiner points, then Burago and Zalgaller [14] proved in 1960 that every planar polygon P has an acute triangulation (all angles < 90◦), and there is now a large collection of theorems, heuristics and applications involving acute triangulations, but several fundamental questions have remained open. What are the optimal upper and lower angle bounds for triangulating a given polygon with Steiner points? Are the optimal angle bounds attained or can they only be approximated? Can both bounds be attained simul- taneously? How regular are the corresponding triangulations? Are there different bounds for dissections than for triangulations? Using ideas involving conformal and quasiconformal mappings, we shall answer each of these questions, starting with the following result. -

Triangulating a Simple Polygon in Linear Time*
Discrete Comput Geom 6:485-524 (1991) GeometryDiscrete & Computational ~) 1991 Springer-Verlag New York Inc. Triangulating a Simple Polygon in Linear Time* Bernard Chazelle Department of Computer Science, Princeton University, Princeton, NJ 08544, USA Abstract. We give a deterministic algorithm for triangulating a simple polygon in linear time. The basic strategy is to build a coarse approximation of a triangulation in a bottom-up phase and then use the information computed along the way to refine the triangulation in a top-down phase. The main tools used are the polygon-cutting theorem, which provides us with a balancing scheme, and the planar separator theorem, whose role is essential in the discovery of new diagonals. Only elementary data structures are required by the algorithm. In particular, no dynamic search trees, finger trees, or point-location structures are needed. We mention a few applications of our algorithm. 1. Introduction Triangulating a simple polygon has been one of the most outstanding open problems in two-dimensional computational geometry. It is a basic primitive in computer graphics and, generally, seems the natural preprocessing step for most nontrivial operations on simple polygons [5], [14]. Recall that to triangulate a polygon is to subdivide it into triangles without adding any new vertices. Despite its apparent simplicity, however, the triangulation problem has remained elusive. In 1978 Garey et al. [12] gave an O(n log n)-time algorithm for triangulating a simple n-gon. While it was widely believed that triangulating should be easier than sorting, no proof was to be found until 1986, when Tarjan and Van Wyk [27] discovered an O(n log log n)-time algorithm. -
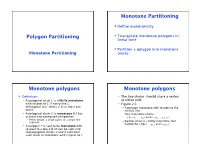
Monotone Polygons in Linear Time
Monotone Partitioning ! Define monotonicity Polygon Partitioning ! Triangulate monotone polygons in linear time ! Partition a polygon into monotone Monotone Partitioning pieces Monotone polygons Monotone polygons ! Definition • The two chains should share a vertex • A polygonal chain C is strictly monotone at either end. with respect to L’ if every line L • Figure 2.1 orthogonal to L’ meets C in at most one – A polygon monotone with respect to the point. vertical line • A polygonal chain C is monotone if L has – Two monotone chains at most one connected component – A = (v0 ,…, v15) and B= (v15,…, v24, v0) – Either empty, a single point, or a single line segment – Neither chain is strictly monotone (two horizontal edges – v v and v v ) • A polygon P is said to be monotone with 5 6 21 22 respect to a line L if ∂P can be split into two polygonal chains A and B such that each chain in monotone with respect to L Monotone polygons Monotone polygons ! Properties of Monotone Polygons • The vertices in each chain of a monotone polygon are sorted with respect to the line of monotonicity • Let y axis be the fixed line of monotonicity • Then vertices can be sorted by y coordinate in linear time • Find a highest vertex, a lowest vertex and partition the boundary into two chains. (linear time) Monotone polygons Monotone Partitioning – Define an interior cusp of a polygon as a reflex vertex v whose adjacent vertices v- and v+ are either both at or above, or both at or below, v. (See Figure 2.2) – Interior cusp can’t have both adjacent vertices with the same y coordinate as v – Thus, d in Figure 2.2(b) is not an interior cusp ! Lemma 2.1.1 • If a polygon P has no interior cups, then it is monotone. -

An Optimal Algorithm for the Separating Common Tangents of Two Polygons
An Optimal Algorithm for the Separating Common Tangents of Two Polygons Mikkel Abrahamsen∗ Department of Computer Science, University of Copenhagen Universitetsparken 5 DK-2100 Copanhagen Ø Denmark [email protected] Abstract We describe an algorithm for computing the separating common tangents of two simple polygons using linear time and only constant workspace. A tangent of a polygon is a line touching the polygon such that all of the polygon lies to the same side of the line. A separating common tangent of two polygons is a tangent of both polygons where the polygons are lying on different sides of the tangent. Each polygon is given as a read-only array of its corners. If a separating common tangent does not exist, the algorithm reports that. Otherwise, two corners defining a separating common tangent are returned. The algorithm is simple and implies an optimal algorithm for deciding if the convex hulls of two polygons are disjoint or not. This was not known to be possible in linear time and constant workspace prior to this paper. An outer common tangent is a tangent of both polygons where the polygons are on the same side of the tangent. In the case where the convex hulls of the polygons are disjoint, we give an algorithm for computing the outer common tangents in linear time using constant workspace. 1998 ACM Subject Classification I.3.5 Computational Geometry and Object Modeling Keywords and phrases planar computational geometry, simple polygon, common tangent, op- timal algorithm, constant workspace Digital Object Identifier 10.4230/LIPIcs.SOCG.2015.198 1 Introduction The problem of computing common tangents of two given polygons has received some attention in the case where the polygons are convex.