Radargrammetric Measurements from the Initial Magellan Coverage of Planet Venus Franz W
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
2014 Final Program
INTERNATIONAL FEDERATION OF HEAD AND NECK ONCOLOGIC SOCIETIES 5th World Congress of IFHNOS & Annual Meeting of the AHNS AMERICAN HEAD AND NECK SOCIETY Celebrating the 100th Anniversary of the Head and Neck Program at Memorial Sloan-Kettering Cancer Center July 26-30, 2014 Marriott Marquis, New York City, NY The Largest Head and Neck Cancer Congress in History A Century of Progress in Head and Neck Cancer HOSTED BY: ORGANIZED & SPONSORED BY: SUPPORTED BY: FINAL PROGRAM WORLD CONGRESS ON LARYNX CANCER 2015 SAVE THE DATE! To view the provisional program visit www.wclc2015.org KEyNoTE ToPiCS: • Larynx cancer and its place in history • Non-open laryngeal surgery including robots • The patient as a variable in defining outcome • Voice restoration/preservation • Clinical trials and larynx cancer • Reconstruction • Pre-malignant lesions • Radiotherapy-where to for the future • Staging and surgical anatomy • Poor prognostic factors for survival • Voice assessment methods and function • Molecular biology and translational • Chemotherapy-good to use alone? research • Swallowing assessment/ • Public health issues around the rehabilitation world including the status of anti-smoking campaigns in China • Transplant • Patient support structures • Survivorship • Databases • Larynx cancer in the developing world Further information: T: +61 3 9249 1273 E: [email protected] VISIBILITY DONORS Thank you to our 2014 Visibility Donors! The following companies have provided generous support for non-CME meeting activities. DIAMOND DONORS Ethicon US, LLC IBM Watson Medtronic Surgical Technologies PLATINUM DONORS Bayer Healthcare Pharmaceuticals and Onyx Pharmaceuticals IRX Therapeutics, Inc. Merck KGaA GOLD DONORS Bristol-Myers Squibb Exelixis SILVER DONORS Covidien Medrobotics Veracyte BRONZE DONOR Olympus America Inc. -

≜ Donors Who Have Financially Supported Kingsborough Every Year for the Past 10 Years Or More
≜ Donors who have financially supported Kingsborough every year for the past 10 years or more. ≜ Donors who have financially supported Kingsborough every year for the past 10 years or more. KINGSBOROUGH COMMUNITY TRUSTEES COLLEGE FOUNDATION MS. GINA ARGENTO July 1, 2015 - June 30, 2016 CEO, Broadway Stages The Kingsborough Community College Foundation’s MR. MICHAEL CORRERA Board of Directors draws its members from a wide Owner, Michael-Towne Wines & Spirits range of professional and academic backgrounds. MR. JAMES A. CROSS, JR. These Board members bring their expertise, their drive, Vice President, Customer Analytics and Risk Management, and their wholehearted commitment to helping the National Grid college realize its vision of the future. MR. MICHAEL FARMER MS. JOAN BARTOLOMEO Chairman, Farmer & Company Chair Community Development Specialist MS. JULIET LEWIS Signature Bank Manager, Brooklyn Public Affairs, Con Edison MR. FARLEY HERZEK MR. STEVEN V. MAKSIN President Managing Partner, Maksin Legal Group, PLLC Kingsborough Community College PROF. JOHN MANBECK MS. SUZANNE M. MURPHY Professor Emeritus, Kingsborough Community College Vice Chair MR. FRANK RUGGIERO Vice President for Development and External Affairs Owner/Manager, Delta Phase Electrical Corporation Teachers College at Columbia University MR. RONI SHOYFER MR. EDUARDO RIOS Vice President, Retail Market Manager, Investors Bank Secretary/Treasurer Vice President for Finance and Administration MR. JAMES P. SLATTERY Kingsborough Community College Brooklyn Volunteer Lawyers Project DR. ELIZABETH BASILE MS. KELLY SULLIVAN Executive Director (Ex-Officio) Partner, Joele Frank, Wilkinson Brimmer Katcher Vice President for Institutional Advancement Kingsborough Community College MR. ALEC TEYTEL Vice President, Branch Manager, TD Bank NA MR. WILLIAM CORRENTI Secretary/Treasurer July 1-June 30, 2015 MR. -

Hearst Corporation Los Angeles Examiner Photographs, Negatives and Clippings--Portrait Files (A-F) 7000.1A
http://oac.cdlib.org/findaid/ark:/13030/c84j0chj No online items Hearst Corporation Los Angeles Examiner photographs, negatives and clippings--portrait files (A-F) 7000.1a Finding aid prepared by Rebecca Hirsch. Data entry done by Nick Hazelton, Rachel Jordan, Siria Meza, Megan Sallabedra, and Vivian Yan The processing of this collection and the creation of this finding aid was funded by the generous support of the Council on Library and Information Resources. USC Libraries Special Collections Doheny Memorial Library 206 3550 Trousdale Parkway Los Angeles, California, 90089-0189 213-740-5900 [email protected] 2012 April 7000.1a 1 Title: Hearst Corporation Los Angeles Examiner photographs, negatives and clippings--portrait files (A-F) Collection number: 7000.1a Contributing Institution: USC Libraries Special Collections Language of Material: English Physical Description: 833.75 linear ft.1997 boxes Date (bulk): Bulk, 1930-1959 Date (inclusive): 1903-1961 Abstract: This finding aid is for letters A-F of portrait files of the Los Angeles Examiner photograph morgue. The finding aid for letters G-M is available at http://www.usc.edu/libraries/finding_aids/records/finding_aid.php?fa=7000.1b . The finding aid for letters N-Z is available at http://www.usc.edu/libraries/finding_aids/records/finding_aid.php?fa=7000.1c . creator: Hearst Corporation. Arrangement The photographic morgue of the Hearst newspaper the Los Angeles Examiner consists of the photographic print and negative files maintained by the newspaper from its inception in 1903 until its closing in 1962. It contains approximately 1.4 million prints and negatives. The collection is divided into multiple parts: 7000.1--Portrait files; 7000.2--Subject files; 7000.3--Oversize prints; 7000.4--Negatives. -

VENUS Corona M N R S a Ak O Ons D M L YN a G Okosha IB E .RITA N Axw E a I O
N N 80° 80° 80° 80° L Dennitsa D. S Yu O Bachue N Szé K my U Corona EG V-1 lan L n- H V-1 Anahit UR IA ya D E U I OCHK LANIT o N dy ME Corona A P rsa O r TI Pomona VA D S R T or EG Corona E s enpet IO Feronia TH L a R s A u DE on U .TÜN M Corona .IV Fr S Earhart k L allo K e R a s 60° V-6 M A y R 60° 60° E e Th 60° N es ja V G Corona u Mon O E Otau nt R Allat -3 IO l m k i p .MARGIT M o E Dors -3 Vacuna Melia o e t a M .WANDA M T a V a D o V-6 OS Corona na I S H TA R VENUS Corona M n r s a Ak o ons D M L YN A g okosha IB E .RITA n axw e A I o U RE t M l RA R T Fakahotu r Mons e l D GI SSE I s V S L D a O s E A M T E K A N Corona o SHM CLEOPATRA TUN U WENUS N I V R P o i N L I FO A A ght r P n A MOIRA e LA L in s C g M N N t K a a TESSERA s U . P or le P Hemera Dorsa IT t M 11 km e am A VÉNUSZ w VENERA w VENUE on Iris DorsaBARSOVA E I a E a A s RM A a a OLO A R KOIDULA n V-7 s ri V VA SSE e -4 d E t V-2 Hiei Chu R Demeter Beiwe n Skadi Mons e D V-5 S T R o a o r LI s I o R M r Patera A I u u s s V Corona p Dan o a s Corona F e A o A s e N A i P T s t G yr A A i U alk 1 : 45 000 000 K L r V E A L D DEKEN t Baba-Jaga D T N T A a PIONEER or E Aspasia A o M e s S a (1 MM= 45 KM) S r U R a ER s o CLOTHO a A N u s Corona a n 40° p Neago VENUS s s 40° s 40° o TESSERA r 40° e I F et s o COCHRAN ZVEREVA Fluctus NORTH 0 500 1000 1500 2000 2500 KM A Izumi T Sekhm n I D . -

NAMED VENUSIAN CRATERS; Joel F
NAMED VENUSIAN CRATERS; Joel F. Russell and Gerald G. Schaber, U.S. Geological Survey, 2255 N. Gemini Dr. Flagstaff, AZ 86001 Schaber et al. [I] compiled a database of 841 craters on Venus, based on Magellan coverage of 89% of the planet's surface. That database, derived from coverage of approximately 98% of Venus' surface, has been expanded to 912 craters, ranging in diameter from 1.5 to 280 krn [2]. About 150 of the larger craters were previously identified by Pioneer Venus and Soviet Venera projects and subsequently forrnally named by the International Astronomical Union (IAU). A few of the features identified and nanled as impact craters on Pioneer and Venera images have not been recognized on Magellan images, and therefore the IAU is being requested to drop their names. For example, the feature known as Cleopatra is officially named as a patera, although it is now generally accepted that Cleopatra is a crater [I]. Also, the feature Eve, which has been used to define the prime meridian for Venus, was erroneously identified as an impact feature, but its true morphology has not been determined from Magellan images. The Magellan project has requested the IAU to name hundreds of craters identified by Magellan. At its triennial General Assembly in Buenos Aires in 1991, the IAU [3] gave full approval to names for 102 craters (table 1) in addition to those previously named. At its 1992 meeting, the IAU's Working Group for Planetary System Nomenclature, which screens all planetary names prior to formal consideration by the General Assembly, gave provisional approval to names for an additional 239 Venusian craters. -
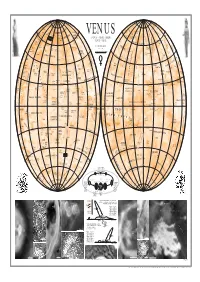
1 : 45 000 000 E a CORONA D T N O M E Or E ASPASIA T Sa MM= KM S R
N N 80° 80° 80° Dennitsa D. 80° Y LO S Sz um U N éla yn H EG nya -U I BACHUE URO IA D d P ANAHIT CHKA PLANIT ors Klenova yr L CORONA M POMONA a D A ET CORONA o N Renpet IS r I R CORONA T sa T Mons EG FERONIA ET L I I H A . Thallo O A U u Tünde CORONA F S k L Mons 60° re R 60° 60° R a 60° . y j R E e u M Ivka a VACUNA GI l m O k . es E Allat Do O EARHART o i p e Margit N OTAU nt M T rsa CORONA a t a D E o I R Melia CORONA n o r o s M M .Wanda S H TA D a L O CORONA a n g I S Akn Mons o B . t Y a x r Mokosha N Rita e w U E M e A AUDRA D s R V s E S R l S VENUS FAKAHOTU a Mons L E E A l ES o GI K A T NIGHTINGALE I S N P O HM Cleopatra M RTUN A VÉNUSZ VENERA CORONA r V I L P FO PLANITIA ÂÅÍÅÐÀ s A o CORONA M e LA N P N n K a IT MOIRA s UM . a Hemera Dorsa A Iris DorsaBarsova 11 km a E IA TESSERA t t m A e a VENUŠE WENUS Hiei Chu n R a r A R E s T S DEMETER i A d ES D L A o Patera A r IS T N o R s r TA VIRIL CORONA s P s u e a L A N I T I A P p nt A o A L t e o N s BEIWE s M A ir u K A D G U Dan Baba-Jaga 1 : 45 000 000 E a CORONA D T N o M e or E ASPASIA t sa MM= KM S r . -

Fluid Outflows from Venus Impact Craters
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 97, NO. E8, PAGES 13,643-13,665 AUGUST 25, 1992 Fluid Outflows From Venus Impact Craters' AnalysisFrom Magellan Data PAUL D. A SIMOW1 Departmentof Earth and Planeta .rySciences, ttarvard Universi.ty,Cambridge, Massachusetts JOHN A. WOOD SmithsonianAstrophysical Observato .rv, Cambridge, Massachusetts Many impactcraters on Venushave unusualoutflow features originating in or underthe continuousejecta blanketsand continuing downhill into the surroundingterrain. Thesefeatures clearly resulted from flow of low- viscosityfluids, but the identityof thosefluids is not clear. In particular,it shouldnot be assumeda priori that the fluid is an impact melt. A numberof candidateprocesses by which impact eventsmight generatethe observedfeatures are considered,and predictionsare made concerningthe theologicalcharacter of flows producedby each mechanism. A sampleof outflowswas analyzedusing Magellan imagesand a model of unconstrainedBingham plastic flow on inclinedplanes, leading to estimatesof viscosityand yield strengthfor the flow materials. It is arguedthat at leasttwo different mechanismshave producedoutflows on Venus: an erosive,channel-forming process and a depositionalprocess. The erosivefluid is probablyan impactmelt, but the depositionalfluid may consistof fluidizedsolid debris, vaporized material, and/or melt. INTRODUCTION extremelydiverse in appearanceand may representmore than one distinctprocess and/or material. Recentlyacquired high-resolution radar images of Venusfrom the Magellan spacecraft have revealed surface features in unprecedenteddetail. In addition to new views of previously SETtING AND MORPHOLOGY OF VENUS CRATER OUTFLOW known features,a seriesof completelynew and often enigmatic FEATURES features have been discovered. Among the new phenomena Over 800 impactcraters were identifiedin imagesproduced by observed,the characterof ejecta depositsaround impact craters the Magellan missionduring its first cycle of orbital mapping, ranks as one of the most enigmatic. -

6 Polygonal Impact Craters (Pics) 18 6.1 Definition of Polygonal Impact Craters
MASTERARBEIT Titel der Masterarbeit “Relative Age of Polygonal Impact Craters on Venus“ Verfasser Dipl.-Ing Gerhard Weihs BSc angestrebter akademischer Titel Master of Science (MSc) Wien, 2014 Studienkennzahl lt. Studienbuch: A 066 861 Studienrichtung lt. Studienblatt: Masterstudium Astronomie Betreuerin: Univ.-Prof. Dr. Maria G. Firneis Acknowledgement I gratefully acknowledge the thoughtful reviews by Univ.-Prof. Dr. Maria G. Firneis and Mag. Johannes J. Leitner, who significantly helped to improve the content and the style of this manuscript. Gerhard Weihs II Contents 1 Introduction 1 1.1 Aims of the Study . .1 1.2 Key Facts of Venus . .1 2 Venusian Surface 2 2.1 Geological Structures on Venusian Surface . .2 2.1.1 Main Elements of the Venusian Surface . .2 2.1.1.1 Volcanic Plains . .3 2.1.1.2 Intensely Deformed Terrains . .4 2.1.1.3 Coronae . .5 2.1.1.4 Impact Craters . .5 3 Geological History of the Venusian Surface 6 3.1 Short Overview of the Geological History . .6 3.2 Cratering Statistics . .7 3.3 Global Resurfacing of Venus . .8 3.3.1 Resurfacing Models . .8 3.3.2 Standard Model of Venusian Resurfacing . .9 4 Dating Planetary Surfaces 11 4.1 Methods of Dating Planetary Surfaces . 11 4.1.1 Absolute Dating - Chronology . 11 4.1.2 Relative Age Dating - Stratigraphy . 11 4.2 Chronology - Absolute Age Dating . 11 4.2.1 Using Radioactive Isotopes . 11 4.2.2 Using Crater Counting . 12 5 Impact Cratering Processes 15 5.1 The three Stages of Formation of Impact Craters . 15 5.1.1 Contact and Compression . -

Generation and Emplacement of Fine-Grained Ejecta in Planetary
Icarus 209 (2010) 818–835 Contents lists available at ScienceDirect Icarus journal homepage: www.elsevier.com/locate/icarus Generation and emplacement of fine-grained ejecta in planetary impacts Rebecca R. Ghent a,*, V. Gupta a, B.A. Campbell b, S.A. Ferguson a, J.C.W. Brown a, R.L. Fergason c, L.M. Carter b a Department of Geology, University of Toronto, 22 Russell St., Toronto, ON, Canada M5S 3B1 b Center for Earth and Planetary Studies, Smithsonian Institution, Washington, DC 20013-7012, United States c Astrogeology Science Center, USGS, Flagstaff, AZ 86001, United States article info abstract Article history: We report here on a survey of distal fine-grained ejecta deposits on the Moon, Mars, and Venus. On all Received 22 October 2009 three planets, fine-grained ejecta form circular haloes that extend beyond the continuous ejecta and Revised 7 May 2010 other types of distal deposits such as run-out lobes or ramparts. Using Earth-based radar images, we find Accepted 11 May 2010 that lunar fine-grained ejecta haloes represent meters-thick deposits with abrupt margins, and are Available online 20 May 2010 depleted in rocks P1 cm in diameter. Martian haloes show low nighttime thermal IR temperatures and thermal inertia, indicating the presence of fine particles estimated to range from 10 lmto Keywords: 10 mm. Using the large sample sizes afforded by global datasets for Venus and Mars, and a complete Moon nearside radar map for the Moon, we establish statistically robust scaling relationships between crater Mars à à À0.18 Venus radius R and fine-grained ejecta run-out r for all three planets. -

Annual Report 06 17 15.Pdf
≜ Donors who have financially supported Kingsborough every year for the past 10 years or more. ≜ Donors who have financially supported Kingsborough every year for the past 10 years or more. PAST PRESIDENTS OF KINGSBOROUGH 1964-1969 Jacob Hartstein | PRESIDENT Hartstein Jacob 1969-1970 Joseph Shenker | Shenker Joseph 1971-1999 ACTING PRESIDENT ACTING 1970-1971 | PRESIDENT Powell Theodore 1999-2000 Leon M. Goldstein | PRESIDENT 1989-1991 Michael Zibrin | ACTING PRESIDENT ACTING Irv (Israel) Glasser | ACTING PRESIDENT 2000-2001 | PRESIDENT McClenney Byron 2004-2013 YEARS OF LEADERSHIP 2003-2004 B. Malamet | Fred Regina S. Peruggi | PRESIDENT 2013-2014 ACTING PRESIDENT ACTING KINGSBOROUGH COMMUNITY COLLEGE | Stuart Suss | INTERIM PRESIDENT ANNUAL REPORT 2014 2 A LETTER FROM DearTHE PRESIDENTFriends of Kingsborough: I am privileged and proud to share our 2013-2014 Annual Report with you. The work highlighted herein has deep roots. Characterized by the legacy of Dr. Regina Peruggi, and championed and continued by Dr. Stuart Suss, who, as Interim President, helped to continue Kingsborough’s progressive momentum. It is with a debt of gratitude to them both that in September 2014 I assumed the leadership of Kingsborough. We celebrated our 50th anniversary in 2013, marking decades of service to communities and students far beyond our campus. More than 1.5 million full-, and part-time, and continuing education students have passed through our doors, spent time in classrooms, in the library, and in the cafeteria. Along the way, your generosity has continued to increase; with your support, students begin their dreams here for an education and a promising future. Farley Herzek | PRESIDENT Alumni have enjoyed rewarding careers in PRESENT a variety of industries including film and 2014- entertainment, education, healthcare, law enforcement, engineering, and public service. -

Venusian Impact Craters
VENUSIAN IMPACT CRATERS J. Raitala, M. Aittola, V.-P. Kostama and T. Törmänen Astronomy Division, Dept. of Physical Sciences, PO Box 3000, FIN-90014 University of Oulu, Finland. [email protected], [email protected], [email protected], [email protected] 1. INTRODUCTION html). Credit: ESA / INAF-IASF, Rome, Italy and Observatoire de Paris, France. In the study of geologic processes, each of the planets will provide a limited insight of its own to a particular The most important Venus missions include Venera sequence of geologic events. This is also the case 9/10 (1975) and Venera 13/14 (1981) landers, and when considering impact event, formation of impact Pioneer Venus (1978), Venera 15/16 (1983) and craters and impactites, and the subsequent Magellan (1989) radar orbiters. The most recent modification and deformation of the impact crater and mission, Venus Express, was launched in fall 2005 to ejecta units. This is a limitation if the approach is and reached the Venus’ orbit in April 2006 (Fig. 1). concentrated to a single planet only, but – after related structures have been studied from a series of similar 2. VENUSIAN ENVIRONMENT AND GEO- type planetary bodies together – it will, at its best, LOGICAL PROCESSES provide the required complementary details to our understanding of the geological process at hand. The surface environment is very hot and dry. The average temperature is ~737K rising from 663.15K Venus is a terrestrial planet, one of the inner Solar within the mountains to 763.15K in lowlands. The 95 System planets with a solid rock surface, silicate bar dense CO2 atmosphere and the thick cloud composition and dense core. -
President's List Summer 2020.Pdf
President's List Brock,Kristina Danilova,Bohdana Vitaliivna Bronkema,MacKenzie Darby,Madelin Mary 2020 Katherine Darocha,Megan Stephania Summer Session Bronson,Caitlyn David,Katelyn L Brooks,Bayard R De Boer,Philip Michael Bryant,Khayci Michelle De Jong,Blake A Buchweitz,Zach De Vries, Aera Aberegg,Kai Bueche,Kristen Nicole DeHollander,Noah Theodore Accardo,Sophia G Buechler,Mary Josephine DeMaar,Alexis Anne Adkins,Candice Katharina Burdo,Isabella L Dejong,Kassidy Ann Aguilar,Lizett Burgen,Kenneth Dale Dekker,Maggie Jess Alcantar-Guzman,Ashley Burley,Kelsea Makennah Dekok,Conner Michael Ames,Zachary Burse,Heather L Dekryger,Madalynn Joy Amick,Parker Jay Bush,Caitlin Elizabeth Devries,Kathryn Jo Anderson,Heather Lynn Deweerd,Madelyn Rose Arizola,Sarah Diaz-Mercado,Alison L Armock,Lila C Dinh,Jennifer Avila,Lorena Calderon,Aunner Y Dokter,Lennelle Joy Capasso,Nicholas Anton Driscol,Alec David Capolino,Michael Duff,Elizabeth B Carmean,Kailey Rose Duimstra,Haley Noelle Babb,Jacob Riley Carpenter,Rachel Elizabeth Duquette,Madeline Elaine Baird,Abigail Rose Carrillo,Connor L Baird,Eric M Chambers,Sarah Baker,Candice O Chang,Moua Kong E Baker,Samuel Chau,Duc Nguyen Edlund,Emma Catherine Barnes,Brian Patrick Chelilim,Jelimo Elders,Noah B Barnes,Rory Marie Chen,Aron Elenbaas,Ryan Alexander Bauman,Natalie Claire Chick,Bethany Ann Ellison,Joseph Bedore,Keri Ciccantelli,Vincent G Ellsworth,Austin Michael Beebe,Samantha Cieply,Maia Reineke Ervin,Marissa Kay Belleveau-Jensen,Sarah J Clark,Ainsley Maguire Evon,Sarah Elizabeth Benda,Kendra Marie Clingan,Shelby