A New Model to Design Software Architectures for Mobile Service Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Setting up Opengl, GLM, and FLTK
Comp 175 - Graphics In Class Lab 0 Setting Up OpenGL, GLM, and FLTK Description: In this lab, your task is to set up your development environment for future labs and assignments that use OpenGL, the GLM library, and FLTK. OpenGL is the standard (3D) graphics library. Although there are other graphics libraries out there (e.g. Vulcan, DirectX or Direct3D by Microsoft, Metal by Apple, and Mantle by AMD), OpenGL remains the most common and most popular API for implementing 3D graphics applications. For convenience, we will be using the GLM library (GLM stands for OpenGL Mathematics) to do all of our linear algebra. The library will help keep the code readable when manipulating matrices, vectors, points, and such. Finally, we will be using FLTK (version 1.3.4) in conjunction with OpenGL. FLTK is a cross-platform, lightweight graphical user interface (GUI) library that supports OpenGL canvas. Since FLTK is cross-platform, you should be able to use your own favorite operating system and windows environment. What a cross-platform toolkit means is that you will write your GUI code once, and you can compile the code in Windows, Mac, and whatever operating system that FLTK supports. The resulting compiled program will be native to the operating system (whereas Java is also a cross-platform language, but Java applications are run in a virtual machine). Personally, I use a Windows machine at home and at work. I have therefore written the initial support code and demo applications in Windows (using Visual Studio 2017 Enterprise edition). For this class, we will support Windows and Mac development environments. -
Drawing in 3D in a Realistic 3D World the Observer Becomes an Actor Whose Actions Provoke Reactions That Leave Tracks in Virtual Reality
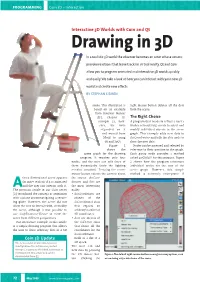
PROGRAMMING Coin 3D – Interaction Interactive 3D Worlds with Coin and Qt Drawing in 3D In a realistic 3D world the observer becomes an actor whose actions provoke reactions that leave tracks in virtual reality. Qt and Coin allow you to program animated and interactive 3D worlds quickly and easily.We take a look at how you can interact with your new 3D world and create new effects. BY STEPHAN SIEMEN scene. This illustration is right mouse button deletes all the dots based on an example from the scene. from Inventor Mentor ([3], Chapter 10, The Right Choice example 2), how- A program that needs to reflect a user’s ever, we have wishes interactively, needs to select and expanded on it modify individual objects in the scene and moved from graph. This example adds new dots to Motif to using dotCoordinates and tells the dots node to Qt and SoQt. draw the new dots. Figure 2 Nodes can be accessed and selected by shows the reference to their position in the graph. scene graph for the drawing Each group node provides a method program. It requires only four called getChild() for this purpose. Figure nodes, and the user can edit three of 2 shows how the program references them dynamically (only the lighting individual nodes via the root of the remains constant). Pressing the center scene graph. However, this simple mouse button rotates the camera about method is extremely error-prone: if three dimensional scene appears the source. dotCoor- far more realistic if it is animated dinates and dots are Aand the user can interact with it. -

Algebraic Methods for Geometric Modeling Julien Wintz
Algebraic Methods for Geometric Modeling Julien Wintz To cite this version: Julien Wintz. Algebraic Methods for Geometric Modeling. Mathematics [math]. Université Nice Sophia Antipolis, 2008. English. tel-00347162 HAL Id: tel-00347162 https://tel.archives-ouvertes.fr/tel-00347162 Submitted on 14 Dec 2008 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Universit´ede Nice Sophia-Antipolis Ecole´ Doctorale STIC THESE` Pr´esent´ee pour obtenir le titre de : Docteur en Sciences de l’Universit´ede Nice Sophia-Antipolis Sp´ecialit´e: Informatique par Julien Wintz Algebraic Methods for Geometric Modeling Soutenue publiquement `al’INRIA le 5 Mai 2008 devant le jury compos´ede : Pr´esident : Andr´e Galligo Universit´ede Nice, France Rapporteurs : Gershon Elber Technion, Israel Tor Dokken Sintef, Norway Examinateurs : Pascal Schreck Universit´eLouis Pasteur, France Christian Arber Missler, France Directeur : Bernard Mourrain Inria Sophia-Antipolis, France Algebraic methods for geometric modeling Julien Wintz Abstract The two fields of algebraic geometry and algorithmic geometry, though closely related, are traditionally represented by almost disjoint communi- ties. Both fields deal with curves and surfaces but objects are represented in different ways. While algebraic geometry defines objects by the mean of equations, algorithmic geometry use to work with linear models. -

Wxshapeframework: an Easy Way for Diagrams Manipulation in C++ Applications
WSEAS TRANSACTIONS on COMPUTERS Michal Bliznak, Tomas Dulik, Vladimir Vasek WXSHAPEFRAMEWORK: AN EASY WAY FOR DIAGRAMS MANIPULATION IN C++ APPLICATIONS MICHAL BLIŽŇÁK1, TOMÁŠ DULÍK2, VLADIMÍR VAŠEK3 Department of Informatics and Artificial Inteligence1, 2, Department of Automation and Control Engineering3 Faculty of Applied Informatics, Tomas Bata University Nad Stráněmi 4511, 760 05, Zlín CZECH REPUBLIC [email protected], [email protected], [email protected] Abstract: wxShapeFramework is new cross-platform software library written in C++ programming language which is suitable for creation of software applications manipulating diagrams, images and other graphical objects. Thanks to the underlying technologies such as wxWidgets toolkit and its XML-based persistent data container add-on called wxXmlSerializer it is an ideal solution for rapid and easy cross-platform visualisation software development. The paper reveals how the wxSF allows user to easily create applications able to interactively handle various scenes consisting of pre-defined or user-defined graphic objects (both vector- and bitmap-based) or GUI controls, store them to XML files, export them to bitmap images, print them etc. Moreover, thanks to applied software licence the library can be used for both open-source and commercial projects on all main target platforms including MS Windows, MacOS and Linux. Keywords: Diagram, vector, bitmap, GUI, wxWidgets, wxXmlSerializer, wxShapeFramework, wxSF, C++ 1 Introduction called shapes (including basic rectangular and elliptic shapes, line and curve shapes, polygonal shapes, static Modern software applications often need the ability to and in-place editable text, bitmap images, etc.). graphically represent various data or logical structures, information flows, processes and similar The wxSF allows to define relationship between abstract information types in the form of diagrams. -
FLTK 1.1.8 Programming Manual Revision 8
FLTK 1.1.8 Programming Manual Revision 8 Written by Michael Sweet, Craig P. Earls, Matthias Melcher, and Bill Spitzak Copyright 1998-2006 by Bill Spitzak and Others. FLTK 1.1.8 Programming Manual Table of Contents Preface..................................................................................................................................................................1 Organization.............................................................................................................................................1 Conventions.............................................................................................................................................2 Abbreviations...........................................................................................................................................2 Copyrights and Trademarks.....................................................................................................................2 1 - Introduction to FLTK...................................................................................................................................3 History of FLTK......................................................................................................................................3 Features....................................................................................................................................................4 Licensing..................................................................................................................................................5 -
PHP Beyond the Web Shell Scripts, Desktop Software, System Daemons and More
PHP Beyond the web Shell scripts, desktop software, system daemons and more Rob Aley This book is for sale at http://leanpub.com/php This version was published on 2013-11-25 This is a Leanpub book. Leanpub empowers authors and publishers with the Lean Publishing process. Lean Publishing is the act of publishing an in-progress ebook using lightweight tools and many iterations to get reader feedback, pivot until you have the right book and build traction once you do. ©2012 - 2013 Rob Aley Tweet This Book! Please help Rob Aley by spreading the word about this book on Twitter! The suggested hashtag for this book is #phpbeyondtheweb. Find out what other people are saying about the book by clicking on this link to search for this hashtag on Twitter: https://twitter.com/search?q=#phpbeyondtheweb Contents Welcome ............................................ i About the author ...................................... i Acknowledgements ..................................... ii 1 Introduction ........................................ 1 1.1 “Use PHP? We’re not building a website, you know!”. ............... 1 1.2 Are you new to PHP? ................................. 2 1.3 Reader prerequisites. Or, what this book isn’t .................... 3 1.4 An important note for Windows and Mac users ................... 3 1.5 About the sample code ................................ 4 1.6 External resources ................................... 4 1.7 Book formats/versions available, and access to updates ............... 5 1.8 English. The Real English. .............................. 5 2 Getting away from the Web - the basics ......................... 6 2.1 PHP without a web server .............................. 6 2.2 PHP versions - what’s yours? ............................. 7 2.3 A few good reasons NOT to do it in PHP ...................... 8 2.4 Thinking about security ............................... -
Audio Video Graphics Working Group Session
Audio Video Graphics Working Group Session San Jose meeting Pieter van de Meulen WG chair 26 January, 2005 CE Linux Forum Technical Conference 1 AVG WG – todays objective: Audio Video 2D 3D Renesas, Mitsubishi, Conexant DirectFB Philips, Samsung UH API P hilips Multi-FB …. OpenGL …. …. …. 26 January, 2005 CE Linux Forum Technical Conference 2 Recall: 25th/26th Presentations • DirectFB - Dennis Oliver Kropp; Convergence ● http://www.directfb.org/ • OpenGL ES, OpenVG and OpenMAX - Ed Plowman; ARM ● http://www.khronos.org/ • Graphics APIS for Linux - Matsubara, Hagiwara, Hisao Munakata; Renesas • Creating GTK+ based UI's for embedded devices - Markku Ursin, Movial ● http://www.gtk.org/ • Linux DVB - Michael Hunold; Convergence ● http://www.linuxtv.org/ • UHAPI (AV streaming) tutorial - John Vugts; Philips/Samsung ● http://www.uhapi.org/ 26 January, 2005 CE Linux Forum Technical Conference 3 Recall: Jan. 25th Demos • FB (Multi-framebuffer) ● Philips: PNX8550 running Linux; dual framebuffer and AV accel. • DirectFB ● Conexant: DVD processor running CELF Linux with DirectFB. ● Mitsubishi: ARIB plane model emulated on DirectFB window system ● Mitsubishi: MPEG4 Player (via GTK+) running on Renesas SH-4 ● Renesas: GTK+ and GUI without X11 • UHAPI (AV streaming): ● Philips open source demo on PC • DTV ● Toshiba America/Europe: DTV reference solution and Home Gateway. • 3D graphics ●Renesas: demo by SI-Electronics on SH-4 and Power VR ●Pioneer: OpenGL 26 January, 2005 CE Linux Forum Technical Conference 4 Linux APIs (2004/6 status) & CCEELLFF VV11..00 -
Advanced Wxpython Nuts and Bolts Robin Dunn O'reilly Open
Advanced wxPython Nuts and Bolts Robin Dunn Software Craftsman O’Reilly Open Source Convention July 21–25, 2008 Slides available at http://wxPython.org/OSCON2008/ wxPython: Cross Platform GUI Toolkit 1 Presentation Overview • Introduction • Widget Inspection Tool • wx.ListCtrl • Keeping the UI Updated • Virtual wx.ListCtrl • Sizers and more sizers • wx.TreeCtrl • XML based resource system • wx.gizmos.TreeListCtrl • Data transfer • CustomTreeCtrl – data objects • wx.grid.Grid – clipboard • ScrolledPanel – drag and drop • wx.HtmlWindow • Creating custom widgets • Double buffered drawing wxPython: Cross Platform GUI Toolkit 2 Introduction to wxPython • wxPython is a GUI toolkit for Python, built upon the wxWidgets C++ toolkit. (See http://wxWidgets.org/) – Cross platform: Windows, Linux, Unix, OS X. – Uses native widgets/controls, plus many platform independent widgets. • Mature, well established projects. – wxWidgets: 1992 – wxPython: 1996 wxPython: Cross Platform GUI Toolkit 3 Introduction: architecture wxPython Library Proxy classes wxPython Extension Modules wxWidgets Toolkit Platform GUI Operating System wxPython: Cross Platform GUI Toolkit 4 Introduction: partial class hierarchy wx.Object wx.EvtHandler wx.Window wx.TopLevelWindow wx.Panel wx.Control wx.Frame wx.Dialog wx.ScrolledWindow wxPython: Cross Platform GUI Toolkit 5 wx.ListCtrl • Presents a list of items with one of several possible views – List – Report – Icon • Supports various attributes and operations on the list data – Icons, and colors – Sorting – multiple selection • -
Up & Running with Wxpython Robin Dunn Patrick O'brien O'reill
wxPython in a Nutshell Robin Dunn http://wxPython.org/ O’Reilly Open Source Convention July 26–30, 2004 wxPython: Cross Platform GUI Toolkit 1 The best way to eat an elephant… wxPython: Cross Platform GUI Toolkit 2 …is one bite at a time wxPython: Cross Platform GUI Toolkit 3 Introduction to wxPython • wxPython is a GUI toolkit for Python, built upon the wxWidgets C++ toolkit. – Cross platform: Windows, Linux, Unix, OS X. – Uses native widgets/controls, plus many platform independent widgets. • Mature, well established projects. – wxWidgets: 1992 – wxPython: 1996 wxPython: Cross Platform GUI Toolkit 4 Introduction: architecture wxPython Library Proxy classes wxPython Extension Modules wxWidgets Toolkit Platform GUI Operating System wxPython: Cross Platform GUI Toolkit 5 Introduction: partial class hierarchy wx.Object wx.EvtHandler wx.Window wx.TopLevelWindow wx.Panel wx.Control wx.Frame wx.Dialog wx.ScrolledWindow wxPython: Cross Platform GUI Toolkit 6 Getting started with wxPython • Installation is simple -- binary installers are available at SourceForge and via http://wxPython.org/download.php for: – Windows: *.exe – Linux: *.rpm (and *.deb’s are available separately.) – OS X: *.dmg, a disk image that contains an Installer package. • Can be built from source for other Unix-like systems. wxPython: Cross Platform GUI Toolkit 7 Getting started with wxPython • Choose an installer. • Which version of Python do you use? – 2.2, or 2.3 • Unicode? – Windows, but be careful with Win9x/ME – Linux/Unix, with the GTK2 build – OS X, soon • or ANSI? – All platforms wxPython: Cross Platform GUI Toolkit 8 Getting started with wxPython • Choose an editor or development environment: – Boa Constructor – WingIDE – PyAlaMode – SCiTE – Emacs, vi, etc. -

Downloading Material Is Agreeing to Abide by the Terms of the Repository Licence
Cronfa - Swansea University Open Access Repository _____________________________________________________________ This is an author produced version of a paper published in : Software—Practice & Experience Cronfa URL for this paper: http://cronfa.swan.ac.uk/Record/cronfa158 _____________________________________________________________ Paper: Laramee, R. (2008). Comparing and evaluating computer graphics and visualization software. Software—Practice & Experience, 38(7), 735-760. http://dx.doi.org/10.1002/spe.v38:7 _____________________________________________________________ This article is brought to you by Swansea University. Any person downloading material is agreeing to abide by the terms of the repository licence. Authors are personally responsible for adhering to publisher restrictions or conditions. When uploading content they are required to comply with their publisher agreement and the SHERPA RoMEO database to judge whether or not it is copyright safe to add this version of the paper to this repository. http://www.swansea.ac.uk/iss/researchsupport/cronfa-support/ SOFTWARE—PRACTICE AND EXPERIENCE Softw. Pract. Exper. 2000; 00:1–7 Prepared using speauth.cls [Version: 2002/09/23 v2.2] Comparing and Evaluating Computer Graphics and Visualization Software Robert S. Laramee∗,† The Visual and Interactive Computing Group, Department of Computer Science, Swansea University, Swansea SA2 8PP, Wales, UK SUMMARY When starting a new computer graphics or visualization software project, students, researchers, and businesses alike must decide whether or not to start from scratch or with third party software. Since computer graphics and visualization applications are typically quite large, developers often build upon existing software libraries in order to take advantage of the tens of thousands of hours worth of development and testing already invested. Thus developers and managers must face the decision of which library to build on. -
Linux, Yocto and Fpgas
Embedded Open Source Experts Linux, Yocto and FPGAs Integrating Linux and Yocto builds into different SoCs From a Linux software perspective: ➤ Increased demand for Linux on FPGAs ➤ Many things to mange, both technical and practical ➤ FPGAs with integrated CPU cores – very similar many other SoCs Here are some experiences and observations... © Codiax 2019 ● Page 2 Why use Linux? ➤ De-facto standard ➤ Huge HW support ➤ FOSS ➤ Flexible ➤ Adaptable ➤ Stable ➤ Scalable ➤ Royalty free ➤ Vendor independent ➤ Large community ➤ Long lifetime Why not Linux? ➤ Too big ➤ Real-time requirements ➤ Certification ➤ Boot time ➤ Licensing ➤ Too open? Desktop Shells: Desktop Display server: Display BrailleDisplay Touch-Screen Mouse & Keyboard Wayland Compositor Wayland + development tools = a lot code!of source Linux system example weston, clayton,mutter,KWin evdev libinput GNOME Shell D radeon nouveau lima etna_viv freedreno tegra-re lima nouveau radeon freedreno etna_viv e libwayland-server libwayland-server s Cinnamon k t o kms p Linux kernel, Linux kernel, Plasma 2 w i (Kernel Mode Setting) Mode (Kernel d g Cairo-Dock e t s drm (Direct Rendering Manager) Rendering (Direct drm cache coherent L2-Caches L2-Caches cache coherent CPU &GPU Enlight. DR19 System libraries: System oflibraries): form (in the Toolkits Interface User µClibc Pango glibc glibc main memory possibly adaptations to Wayland/Mir libwayland / COGL libwayland Cairo Cairo (Xr) GTK+ Clutter 2D Application 2D GModule GThread GThread GLib GObject Glib GIO ATK devicedrivers other& modules System -

STAR Geometry Browser
The STAR “Integrated" Geometry Browser V.Fine How to start the Browser To start the STAR Geometry browser use 3 shell commands: > stardev > source $STAR/QtRoot/qtgl/qtcoin/setup.csh > root4star GeomBrowse.C The browser requires the Qt ROOT plug-in to be activated instead of the “X11” plug-in which is ROOT default. To change the default, one has to provide the custom “.rootrc” file as follows: Gui.Backend qt Plugin.TGuiFactory qtgui TQtGUIFactory QtRootGui "TQtGUIFactory()" Gui.Factory qtgui Plugin.TVirtualPadEditor Ged TQtGedEditor QtGed "TQtGedEditor(TCanvas*)" Plugin.TVirtualViewer3D ogl TQtRootViewer3D RQTGL "TQtRootViewer3D(TVirtualPad*)" +Plugin.TVirtualViewer3D oiv TQtRootCoinViewer3D RQIVTGL "TQtRootCoinViewer3D(TVirtualPad*)" The GeomBrowse.C does check whether Qt plug-in has been activated and does create the proper “.rootrc” file for you if needed 12/6/2006 STAR BNL http://www.star.bnl.gov/STAR/comp/vis/ S&C STAV.FRine week (fine@ly mbnl.eeting.gov ) 2 Input 3D geometry formats • Zebra - *.fz • ROOT Macro - *.C • ROOT file - *.root • "Open Inventor" - *.iv, can be used to combine the ROOT/ GEANT objects with non-ROOT 3D shapes • VRML - *.wrl, can be used to combine the ROOT/ GEANT objects with non-ROOT 3D shapes In the other words, all versions of the STAR detector geometry description for "GEANT Simulation" and "Reconstruction" can be visualized. 12/6/2006 STAR BNL http://www.star.bnl.gov/STAR/comp/vis/ S&C STAV.FRine week (fine@ly mbnl.eeting.gov ) 3 The output formats: 1. All common pixmap formats: gif, png, jpg, tiff etc (can be used to create still and animated files) 2.