Linearizability of Persistent Memory Objects Under a Full-System-Crash Failure Model
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Memory Consistency
Lecture 9: Memory Consistency Parallel Computing Stanford CS149, Winter 2019 Midterm ▪ Feb 12 ▪ Open notes ▪ Practice midterm Stanford CS149, Winter 2019 Shared Memory Behavior ▪ Intuition says loads should return latest value written - What is latest? - Coherence: only one memory location - Consistency: apparent ordering for all locations - Order in which memory operations performed by one thread become visible to other threads ▪ Affects - Programmability: how programmers reason about program behavior - Allowed behavior of multithreaded programs executing with shared memory - Performance: limits HW/SW optimizations that can be used - Reordering memory operations to hide latency Stanford CS149, Winter 2019 Today: what you should know ▪ Understand the motivation for relaxed consistency models ▪ Understand the implications of relaxing W→R ordering Stanford CS149, Winter 2019 Today: who should care ▪ Anyone who: - Wants to implement a synchronization library - Will ever work a job in kernel (or driver) development - Seeks to implement lock-free data structures * - Does any of the above on ARM processors ** * Topic of a later lecture ** For reasons to be described later Stanford CS149, Winter 2019 Memory coherence vs. memory consistency ▪ Memory coherence defines requirements for the observed Observed chronology of operations on address X behavior of reads and writes to the same memory location - All processors must agree on the order of reads/writes to X P0 write: 5 - In other words: it is possible to put all operations involving X on a timeline such P1 read (5) that the observations of all processors are consistent with that timeline P2 write: 10 ▪ Memory consistency defines the behavior of reads and writes to different locations (as observed by other processors) P2 write: 11 - Coherence only guarantees that writes to address X will eventually propagate to other processors P1 read (11) - Consistency deals with when writes to X propagate to other processors, relative to reads and writes to other addresses Stanford CS149, Winter 2019 Coherence vs. -

Memory Consistency: in a Distributed Outline for Lecture 20 Memory System, References to Memory in Remote Processors Do Not Take Place I
Memory consistency: In a distributed Outline for Lecture 20 memory system, references to memory in remote processors do not take place I. Memory consistency immediately. II. Consistency models not requiring synch. This raises a potential problem. Suppose operations that— Strict consistency Sequential consistency • The value of a particular memory PRAM & processor consist. word in processor 2’s local memory III. Consistency models is 0. not requiring synch. operations. • Then processor 1 writes the value 1 to that word of memory. Note that Weak consistency this is a remote write. Release consistency • Processor 2 then reads the word. But, being local, the read occurs quickly, and the value 0 is returned. What’s wrong with this? This situation can be diagrammed like this (the horizontal axis represents time): P1: W (x )1 P2: R (x )0 Depending upon how the program is written, it may or may not be able to tolerate a situation like this. But, in any case, the programmer must understand what can happen when memory is accessed in a DSM system. Consistency models: A consistency model is essentially a contract between the software and the memory. It says that iff they software agrees to obey certain rules, the memory promises to store and retrieve the expected values. © 1997 Edward F. Gehringer CSC/ECE 501 Lecture Notes Page 220 Strict consistency: The most obvious consistency model is strict consistency. Strict consistency: Any read to a memory location x returns the value stored by the most recent write operation to x. This definition implicitly assumes the existence of a global clock, so that the determination of “most recent” is unambiguous. -

Towards Shared Memory Consistency Models for Gpus
TOWARDS SHARED MEMORY CONSISTENCY MODELS FOR GPUS by Tyler Sorensen A thesis submitted to the faculty of The University of Utah in partial fulfillment of the requirements for the degree of Bachelor of Science School of Computing The University of Utah March 2013 FINAL READING APPROVAL I have read the thesis of Tyler Sorensen in its final form and have found that (1) its format, citations, and bibliographic style are consistent and acceptable; (2) its illustrative materials including figures, tables, and charts are in place. Date Ganesh Gopalakrishnan ABSTRACT With the widespread use of GPUs, it is important to ensure that programmers have a clear understanding of their shared memory consistency model i.e. what values can be read when issued concurrently with writes. While memory consistency has been studied for CPUs, GPUs present very different memory and concurrency systems and have not been well studied. We propose a collection of litmus tests that shed light on interesting visibility and ordering properties. These include classical shared memory consistency model properties, such as coherence and write atomicity, as well as GPU specific properties e.g. memory visibility differences between intra and inter block threads. The results of the litmus tests are determined by feedback from industry experts, the limited documentation available and properties common to all modern multi-core systems. Some of the behaviors remain unresolved. Using the results of the litmus tests, we establish a formal state transition model using intuitive data structures and operations. We implement our model in the Murphi modeling language and verify the initial litmus tests. -

Concurrent Objects and Linearizability Concurrent Computaton
Concurrent Objects and Concurrent Computaton Linearizability memory Nir Shavit Subing for N. Lynch object Fall 2003 object © 2003 Herlihy and Shavit 2 Objectivism FIFO Queue: Enqueue Method • What is a concurrent object? q.enq( ) – How do we describe one? – How do we implement one? – How do we tell if we’re right? © 2003 Herlihy and Shavit 3 © 2003 Herlihy and Shavit 4 FIFO Queue: Dequeue Method Sequential Objects q.deq()/ • Each object has a state – Usually given by a set of fields – Queue example: sequence of items • Each object has a set of methods – Only way to manipulate state – Queue example: enq and deq methods © 2003 Herlihy and Shavit 5 © 2003 Herlihy and Shavit 6 1 Pre and PostConditions for Sequential Specifications Dequeue • If (precondition) – the object is in such-and-such a state • Precondition: – before you call the method, – Queue is non-empty • Then (postcondition) • Postcondition: – the method will return a particular value – Returns first item in queue – or throw a particular exception. • Postcondition: • and (postcondition, con’t) – Removes first item in queue – the object will be in some other state • You got a problem with that? – when the method returns, © 2003 Herlihy and Shavit 7 © 2003 Herlihy and Shavit 8 Pre and PostConditions for Why Sequential Specifications Dequeue Totally Rock • Precondition: • Documentation size linear in number –Queue is empty of methods • Postcondition: – Each method described in isolation – Throws Empty exception • Interactions among methods captured • Postcondition: by side-effects -
On the Coexistence of Shared-Memory and Message-Passing in The
On the Co existence of SharedMemory and MessagePassing in the Programming of Parallel Applications 1 2 J Cordsen and W SchroderPreikschat GMD FIRST Rudower Chaussee D Berlin Germany University of Potsdam Am Neuen Palais D Potsdam Germany Abstract Interop erability in nonsequential applications requires com munication to exchange information using either the sharedmemory or messagepassing paradigm In the past the communication paradigm in use was determined through the architecture of the underlying comput ing platform Sharedmemory computing systems were programmed to use sharedmemory communication whereas distributedmemory archi tectures were running applications communicating via messagepassing Current trends in the architecture of parallel machines are based on sharedmemory and distributedmemory For scalable parallel applica tions in order to maintain transparency and eciency b oth communi cation paradigms have to co exist Users should not b e obliged to know when to use which of the two paradigms On the other hand the user should b e able to exploit either of the paradigms directly in order to achieve the b est p ossible solution The pap er presents the VOTE communication supp ort system VOTE provides co existent implementations of sharedmemory and message passing communication Applications can change the communication paradigm dynamically at runtime thus are able to employ the under lying computing system in the most convenient and applicationoriented way The presented case study and detailed p erformance analysis un derpins the -

Consistency Models • Data-Centric Consistency Models • Client-Centric Consistency Models
Consistency and Replication • Today: – Consistency models • Data-centric consistency models • Client-centric consistency models Computer Science CS677: Distributed OS Lecture 15, page 1 Why replicate? • Data replication: common technique in distributed systems • Reliability – If one replica is unavailable or crashes, use another – Protect against corrupted data • Performance – Scale with size of the distributed system (replicated web servers) – Scale in geographically distributed systems (web proxies) • Key issue: need to maintain consistency of replicated data – If one copy is modified, others become inconsistent Computer Science CS677: Distributed OS Lecture 15, page 2 Object Replication •Approach 1: application is responsible for replication – Application needs to handle consistency issues •Approach 2: system (middleware) handles replication – Consistency issues are handled by the middleware – Simplifies application development but makes object-specific solutions harder Computer Science CS677: Distributed OS Lecture 15, page 3 Replication and Scaling • Replication and caching used for system scalability • Multiple copies: – Improves performance by reducing access latency – But higher network overheads of maintaining consistency – Example: object is replicated N times • Read frequency R, write frequency W • If R<<W, high consistency overhead and wasted messages • Consistency maintenance is itself an issue – What semantics to provide? – Tight consistency requires globally synchronized clocks! • Solution: loosen consistency requirements -
Goals of This Lecture How to Increase the Compute Power?
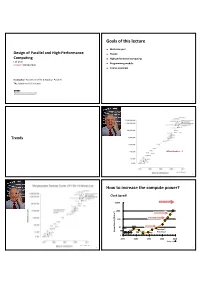
Goals of this lecture Motivate you! Design of Parallel and High-Performance Trends Computing High performance computing Fall 2017 Programming models Lecture: Introduction Course overview Instructor: Torsten Hoefler & Markus Püschel TA: Salvatore Di Girolamo 2 © Markus Püschel Computer Science Trends What doubles …? Source: Wikipedia 3 4 How to increase the compute power? Clock Speed! 10000 Sun’s Surface 1000 ) 2 Rocket Nozzle Nuclear Reactor 100 10 8086 Hot Plate 8008 8085 Pentium® Power Density (W/cm Power 4004 286 386 486 Processors 8080 1 1970 1980 1990 2000 2010 Source: Intel Source: Wikipedia 5 6 How to increase the compute power? Evolutions of Processors (Intel) Not an option anymore! Clock Speed! 10000 Sun’s Surface 1000 ) 2 Rocket Nozzle Nuclear Reactor 100 ~3 GHz Pentium 4 Core Nehalem Haswell Pentium III Sandy Bridge Hot Plate 10 8086 Pentium II 8008 free speedup 8085 Pentium® Pentium Pro Power Density (W/cm Power 4004 286 386 486 Processors 8080 Pentium 1 1970 1980 1990 2000 2010 Source: Intel 7 8 Source: Wikipedia/Intel/PCGuide Evolutions of Processors (Intel) Evolutions of Processors (Intel) Cores: 8x ~360 Gflop/s Vector units: 8x parallelism: work required 2 2 4 4 4 8 cores ~3 GHz Pentium 4 Core Nehalem Haswell Pentium III Sandy Bridge Pentium II Pentium Pro free speedup Pentium memory bandwidth (normalized) 9 10 Source: Wikipedia/Intel/PCGuide Source: Wikipedia/Intel/PCGuide A more complete view Source: www.singularity.com Can we do this today? 11 12 © Markus Püschel Computer Science High-Performance Computing (HPC) a.k.a. “Supercomputing” Question: define “Supercomputer”! High-Performance Computing 13 14 High-Performance Computing (HPC) a.k.a. -
Challenges for the Message Passing Interface in the Petaflops Era
Challenges for the Message Passing Interface in the Petaflops Era William D. Gropp Mathematics and Computer Science www.mcs.anl.gov/~gropp What this Talk is About The title talks about MPI – Because MPI is the dominant parallel programming model in computational science But the issue is really – What are the needs of the parallel software ecosystem? – How does MPI fit into that ecosystem? – What are the missing parts (not just from MPI)? – How can MPI adapt or be replaced in the parallel software ecosystem? – Short version of this talk: • The problem with MPI is not with what it has but with what it is missing Lets start with some history … Argonne National Laboratory 2 Quotes from “System Software and Tools for High Performance Computing Environments” (1993) “The strongest desire expressed by these users was simply to satisfy the urgent need to get applications codes running on parallel machines as quickly as possible” In a list of enabling technologies for mathematical software, “Parallel prefix for arbitrary user-defined associative operations should be supported. Conflicts between system and library (e.g., in message types) should be automatically avoided.” – Note that MPI-1 provided both Immediate Goals for Computing Environments: – Parallel computer support environment – Standards for same – Standard for parallel I/O – Standard for message passing on distributed memory machines “The single greatest hindrance to significant penetration of MPP technology in scientific computing is the absence of common programming interfaces across various parallel computing systems” Argonne National Laboratory 3 Quotes from “Enabling Technologies for Petaflops Computing” (1995): “The software for the current generation of 100 GF machines is not adequate to be scaled to a TF…” “The Petaflops computer is achievable at reasonable cost with technology available in about 20 years [2014].” – (estimated clock speed in 2004 — 700MHz)* “Software technology for MPP’s must evolve new ways to design software that is portable across a wide variety of computer architectures. -

Core Processors
UNIVERSITY OF CALIFORNIA Los Angeles Parallel Algorithms for Medical Informatics on Data-Parallel Many-Core Processors A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Computer Science by Maryam Moazeni 2013 © Copyright by Maryam Moazeni 2013 ABSTRACT OF THE DISSERTATION Parallel Algorithms for Medical Informatics on Data-Parallel Many-Core Processors by Maryam Moazeni Doctor of Philosophy in Computer Science University of California, Los Angeles, 2013 Professor Majid Sarrafzadeh, Chair The extensive use of medical monitoring devices has resulted in the generation of tremendous amounts of data. Storage, retrieval, and analysis of such data require platforms that can scale with data growth and adapt to the various behavior of the analysis and processing algorithms. In recent years, many-core processors and more specifically many-core Graphical Processing Units (GPUs) have become one of the most promising platforms for high performance processing of data, due to the massive parallel processing power they offer. However, many of the algorithms and data structures used in medical and bioinformatics systems do not follow a data-parallel programming paradigm, and hence cannot fully benefit from the parallel processing power of ii data-parallel many-core architectures. In this dissertation, we present three techniques to adapt several non-data parallel applications in different dwarfs to modern many-core GPUs. First, we present a load balancing technique to maximize parallelism in non-serial polyadic Dynamic Programming (DP), which is a family of dynamic programming algorithms with more non-uniform data access pattern. We show that a bottom-up approach to solving the DP problem exploits more parallelism and therefore yields higher performance. -
An Overview on Cyclops-64 Architecture - a Status Report on the Programming Model and Software Infrastructure
An Overview on Cyclops-64 Architecture - A Status Report on the Programming Model and Software Infrastructure Guang R. Gao Endowed Distinguished Professor Electrical & Computer Engineering University of Delaware [email protected] 2007/6/14 SOS11-06-2007.ppt 1 Outline • Introduction • Multi-Core Chip Technology • IBM Cyclops-64 Architecture/Software • Cyclops-64 Programming Model and System Software • Future Directions • Summary 2007/6/14 SOS11-06-2007.ppt 2 TIPs of compute power operating on Tera-bytes of data Transistor Growth in the near future Source: Keynote talk in CGO & PPoPP 03/14/07 by Jesse Fang from Intel 2007/6/14 SOS11-06-2007.ppt 3 Outline • Introduction • Multi-Core Chip Technology • IBM Cyclops-64 Architecture/Software • Programming/Compiling for Cyclops-64 • Looking Beyond Cyclops-64 • Summary 2007/6/14 SOS11-06-2007.ppt 4 Two Types of Multi-Core Architecture Trends • Type I: Glue “heavy cores” together with minor changes • Type II: Explore the parallel architecture design space and searching for most suitable chip architecture models. 2007/6/14 SOS11-06-2007.ppt 5 Multi-Core Type II • New factors to be considered –Flops are cheap! –Memory per core is small –Cache-coherence is expensive! –On-chip bandwidth can be enormous! –Examples: Cyclops-64, and others 2007/6/14 SOS11-06-2007.ppt 6 Flops are Cheap! An example to illustrate design tradeoffs: • If fed from small, local register files: 64-bit FP – 3200 GB/s, 10 pJ/op unit – < $1/Gflop (60 mW/Gflop) (drawn to a 64-bit FPU is < 1mm^2 scale) and ~= 50pJ • If fed from global on-chip memory: Can fit over 200 on a chip. -

Concurrent and Parallel Programming
Concurrent and parallel programming Seminars in Advanced Topics in Computer Science Engineering 2019/2020 Romolo Marotta Trend in processor technology Concurrent and parallel programming 2 Blocking synchronization SHARED RESOURCE Concurrent and parallel programming 3 Blocking synchronization …zZz… SHARED RESOURCE Concurrent and parallel programming 4 Blocking synchronization Correctness guaranteed by mutual exclusion …zZz… SHARED RESOURCE Performance might be hampered because of waste of clock cycles Liveness might be impaired due to the arbitration of accesses Concurrent and parallel programming 5 Parallel programming • Ad-hoc concurrent programming languages • Development tools ◦ Compilers ◦ MPI, OpenMP, libraries ◦ Tools to debug parallel code (gdb, valgrind) • Writing parallel code is an art ◦ There are approaches, not prepackaged solutions ◦ Every machine has its own singularities ◦ Every problem to face has different requisites ◦ The most efficient parallel algorithm might not be the most intuitive one Concurrent and parallel programming 6 What do we want from parallel programs? • Safety: nothing wrong happens (Correctness) ◦ parallel versions of our programs should be correct as their sequential implementations • Liveliness: something good happens eventually (Progress) ◦ if a sequential program terminates with a given input, we want that its parallel alternative also completes with the same input • Performance ◦ we want to exploit our parallel hardware Concurrent and parallel programming 7 Correctness conditions Progress conditions -

Constraint Graph Analysis of Multithreaded Programs
Journal of Instruction-Level Parallelism 6 (2004) 1-23 Submitted 10/03; published 4/04 Constraint Graph Analysis of Multithreaded Programs Harold W. Cain [email protected] Computer Sciences Dept., University of Wisconsin 1210 W. Dayton St., Madison, WI 53706 Mikko H. Lipasti [email protected] Dept. of Electrical and Computer Engineering, University of Wisconsin 1415 Engineering Dr., Madison, WI 53706 Ravi Nair [email protected] IBM T.J. Watson Research Laboratory P.O. Box 218, Yorktown Heights, NY 10598 Abstract This paper presents a framework for analyzing the performance of multithreaded programs using a model called a constraint graph. We review previous constraint graph definitions for sequentially consistent systems, and extend these definitions for use in analyzing other memory consistency models. Using this framework, we present two constraint graph analysis case studies using several commercial and scientific workloads running on a full system simulator. The first case study illus- trates how a constraint graph can be used to determine the necessary conditions for implementing a memory consistency model, rather than conservative sufficient conditions. Using this method, we classify coherence misses as either required or unnecessary. We determine that on average over 30% of all load instructions that suffer cache misses due to coherence activity are unnecessarily stalled because the original copy of the cache line could have been used without violating the mem- ory consistency model. Based on this observation, we present a novel delayed consistency imple- mentation that uses stale cache lines when possible. The second case study demonstrates the effects of memory consistency constraints on the fundamental limits of instruction level parallelism, com- pared to previous estimates that did not include multiprocessor constraints.