Safety Performance and Robustness of Heavy Vehicle AVCS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Investor Presentation April 2020 (Fact Book 2019)
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24.4 x 7.6 cm) Investor Presentation April 2020 (Fact Book 2019) www.continental.com Investor Relations Agenda 1 Continental at a Glance 2 2 Strategy 13 3 Automotive Group 24 3.1 Chassis & Safety → Autonomous Mobility and Safety 34 3.2 Interior → Vehicle Networking and Information 48 3.3 Powertrain → Vitesco Technologies 60 4 Rubber Group 63 4.1 Tires 69 4.2 ContiTech 83 5 Corporate Governance 91 6 Sustainability 101 7 Shares and Bonds 113 8 Glossary 120 2 Investor Presentation, April 2020 © Continental AG 1 | Continental at a Glance One of the World’s Leading Technology Companies for Mobility › Continental develops pioneering technologies and services for sustainable and €44.5 billion connected mobility of people and their goods. 2019 sales › We offer safe, efficient, intelligent, and affordable solutions for vehicles, machines, traffic and transportation. › Continental was founded in 1871 and is headquartered in Hanover, Germany. 241,458 employees (December 31, 2019) 2019 sales by group Rubber Group 595 Locations 40% in 59 countries and markets (December 31, 2019) Automotive Group 60% 3 Investor Presentation, April 2020 © Continental AG 1 | Continental at a Glance Founded in 1871, Expanding into Automotive Electronics Since 1998 Continental-Caoutchouc- and Continental expands its activities in telematics Continental expands Gutta-Percha Compagnie is and other fields by acquiring the automotive Continental expands its expertise in founded in Hanover, Germany. electronics business from Motorola. software and systems vehicle antennas by expertise through the acquiring Kathrein Acquisition of a US Continental reinforces its acquisition of Elektrobit. -

General Disclaimer One Or More of the Following Statements May Affect This Document
General Disclaimer One or more of the Following Statements may affect this Document This document has been reproduced from the best copy furnished by the organizational source. It is being released in the interest of making available as much information as possible. This document may contain data, which exceeds the sheet parameters. It was furnished in this condition by the organizational source and is the best copy available. This document may contain tone-on-tone or color graphs, charts and/or pictures, which have been reproduced in black and white. This document is paginated as submitted by the original source. Portions of this document are not fully legible due to the historical nature of some of the material. However, it is the best reproduction available from the original submission. Produced by the NASA Center for Aerospace Information (CASI) DOE/NASA/0595-78/1 NASA CR-135341 PRELIMINARY POWER TRAIN DESIGN FOR A STATE-OF-THE-ART ELECTRIC VEHICLE Phillip Mighdoll and William F. Hahn Design and Development Division BOOZ, ALLEN 6 HAMILTON Inc. t April, 1978 Prepared for NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Lewis Research Center Under Contract NAS 3-20595 fo r U.S. DEPARTMENT OF ENERGY Electric and Hybrid Vehicle Systems Program Division of Transportation Energy Conservation (NASA-CR-135341) PRELI41NARY POWER TRAIN N78-29992 T DESIGN FOR A STATE-OF-THE-ART ELECTRIC i VEHICLE Final Report (30cz-Allen and Hamilton, Inc.) 144 p 11C A07/MF A01 rincIas CSCL 13F 03/85 27173 DOE/NASA/0595-78/ 1 NASA CR-135341 PREUMI 9ARY POWER TRAIN DESIGN FOR ,A STATE-OF-` HEART ELECTRIC VEHICLE Phillip Mighdoll and William F. -

The War to Deliver More to Your Door Delivery Services Duke It for Their Slice Page 13 of the Pie – Dec.: Dec.: Keith Turner
CLIMER COLUMN Champions of strife He might be OK, but Vol coach’s ‘infallible’ system looks a little less so now. JERRY DENHAM GHIANNI COLUMN Brighter than P13 average show What’s not to love about Jellystone Park’s over-the-top, DAVIDSON • WILLIAMSON • RUTHERFORD • CHEATHAM WILSON SUMNER• ROBERTSON • MAURY • DICKSON • MONTGOMERY Ledger drive-through light show? HELPING OTHERS GET TO A P12 SEE OUR AD ON PAGE 8 December 2 – 8, 2016 The power of information.NASHVILLE Vol. 42 EDITION | Issue 49 www.TNLedger.com The war to deliver FORMERLY WESTVIEW SINCE 1978 more Page 13 Dec.: Dec.: Keith Turner, Ratliff, Jeanan Mills Stuart, Resp.: Kimberly Dawn Wallace, Atty: Mary C Lagrone, 08/24/2010, 10P1318 In re: Jeanan Mills Stuart, Princess Angela Gates, Jeanan Mills Stuart, Princess Angela Gates,Dec.: Resp.: Kim Prince Patrick, Angelo Terry Patrick, to your Gates, Atty: Monica D Edwards, 08/25/2010, 10P1326 In re: Keith Turner, TN Dept Of Correction, www.westviewonline.com TN Dept Of Correction, Resp.: Johnny Moore,Dec.: Melinda Atty: Bryce L Tomlinson, Coatney, Resp.: Pltf(s): Rodney A Hall, Pltf Atty(s): n/a, 08/27/2010, 10P1336 In re: Kim Patrick, Terry Patrick, Pltf(s): Sandra Heavilon, Resp.: Jewell Tinnon, Atty: Ronald Andre Stewart, 08/24/2010,Dec.: Seton Corp 10P1322 Insurance Company, Dec.: Regions Bank, Resp.: Leigh A Collins, In re: Melinda L Tomlinson, Def(s): Jit Steel Transport Inc, National Fire Insurance Company, Elizabeth D Hale, Atty: William Warner McNeilly, 08/24/2010, Def Atty(s): J Brent Moore, 08/26/2010, 10C3316 10P1321 -

Preferred Employer Program Companies*
Preferred Employer Program Companies* • 3M Company • AutoZone • Cintas • 7-Eleven • Avera Health • Cisco Systems • AAA - (Employees Only) • Avon Products • Citigroup • Abbott Laboratories • Bacardi USA • Citizens Financial Group • AbbVie Corp. • Bank of America Corp. • Cleveland Clinic Foundation • Accenture Ltd. • Baptist Health South Florida • Coca-Cola Bottling Co. • adidas America • Barclays Capital/Stifel Financial • Coldwell Banker Richard Ellis • Advanced Micro Devices • Bausch & Lomb • Compass Group USA • Aflac - (Employees Only) • Bayer Corp. • ConocoPhillips • Alcon Laboratories • Becton, Dickinson and Company • Continental General Tire • ALDI • Berkshire Hathaway • Corning • Allegheny Health Network • BI Worldwide • Costco • Allergan • Biogen Idec • Cowan Systems • Alliance Data • BioReference Labs • Cox Enterprises • Allianz Global Investors of America • Bloomin’ Brands • Credit Suisse Asset Mgmt. • Allstate Insurance Co. - (Employees Only) • Blue Cross Blue Shield - (Employees Only) • CSRA International • Altice • Blue Iron • Cumberland Farms • Amazon • Boehringer Ingelheim Pharmaceuticals • Curtiss-Wright Corp. • American Airlines Credit Union • Boeing Corp. • CVS • American Association of Physicians • Boston Scientific Corp. • Daimler Trucks North America of Indian Origin • BP • Dassault Systèmes • American Express Co. - (Employees Only) • Braintree Laboratories • DealerTrack Holdings • AMETEK • Bristol Myers Squibb • Del Monte Foods • Amgen • Broadcom • Dell • Analog Devices • Brown-Forman • Deloitte & Touche LLP • Anthem -

Bfgoodrich Mint 400 Tech 03/07/2019 300 a 3 Entries Open A
Page 1 of 37 BFGoodrich Mint 400 Tech 03/07/2019 300 A 3 Entries Number Name Brand Sponsors 255 Dustin Tanguay (32) Las Vegas, NV KTM Bushwackers Chris Diponte (44) Henderson, NV 256 Jacob Endress (15) Agua Dulce, CA Honda Padea Inc., SIDI, Kenda Precision Concepts Chayton Gardner (16) Acton, CA Bruce Byrd (17) Santa Ana, CA 277 Curt Fackrell (53) Prescott, AZ KTM Viewpoint Dual Recovery Center Kyle Evans (29) Peoria, AZ Zac Gabbert (26) Prescott Valley, AZ Open A 11 Entries Number Name Brand Sponsors N7 Mark Samuels (29) Pioneertown, CA Honda Monster Energy, STI Tires, American Honda, Lava Propain, FLY Justin Jones (26) Yucca Valley, CA Justin Morgan (29) El Cajon, CA 354 Clayton Reichard (25) Fontana, CA Honda Mom and Dad, 100%, Amsoil, Dale Morse (55) Rancho Santa Margeri, CA 356 Anthony Monachelli (19) Fernley, NV Honda Shari Walsh w/SummitFunding, One11Concepts, Side Surfers, Fros Garage, Grandma, Hailee Trevor Walsh (24) Verdi, NV Kelly . Walsh (49) Fernley, NV Casey Walsh (49) Fernley, NV 358 Austin Smith (27) Yprba Linda, CA Honda RaceWorx Preston Pasley (27) Ontario, CA 360 Brett Stevens (36) Las Vegas, NV Husqvarna Fohse, IMS, Rekluse, Rasstco., ODI Tucker Norman (17) Las Vegas, NV 372 Brock Collins (15) Henderson, NV Honda Sportsman Cycle, Sunset Oasis Landscaping. Patricks Sign Brian Lopez (35) Whitter, CA Thomas Tangedal (25) Henderson, NV 380 Chris Dostal (25) Lake Havasu City, AZ Honda ProValve Racing Suspension Maxwell J. Ray (17) Lake Havasu City, AZ Jake Ray (20) Lake Havasu City, AZ 389 Robert Silvernail (29) Las Vegas, NV Honda Motorcycle Tire Center Cory Cordero (29) Las Vegas, NV Kristopher Carter (28) Las Vegas, NV Morgan Marinello (27) Las Vegas, NV 393 Jake . -

CY13 FLEET EMPLOYEE PROGRAM (FEP) ELIGIBLE COMPANIES COMPANY NAME CAN COMPANY NAME CAN 3 M Company 005004 Merck & Co., Inc
CY13 FLEET EMPLOYEE PROGRAM (FEP) ELIGIBLE COMPANIES COMPANY NAME CAN COMPANY NAME CAN 3 M Company 005004 Merck & Co., Inc. 006356 AAA – EMPLOYEES ONLY 005010 Merrill Lynch 006362 A O N Corporation 007372 Met Life Auto & Home Insurance C. – 006367 EMPLOYEES ONLY A.P. Moller – Maersk 006283 MGM Resorts International (Includes: 013139 Mandalay Bay, MGM Grand, MGM Mirage, Monte Carlo, Bellagio, New York New York and Aria Hotels) A T &T Inc 005207 Michelin North America, Inc. 006379 Abbott Laboratories 005014 Microsoft Corporation 006385 Accenture 017610 Mission Foods 014183 Acushnet Company 019724 Morgan Stanley 006427 ADP – Automatic Data Processing 008478 Motorola Inc. 006436 Advanced Micro Devices, Inc. 017083 Mtu Aena 020418 Agco Corporation 016893 Munich Reinsurance America, Inc. 015843 (Includes: Midland Group (7000 Midland Blvd., Amelia, OH 45102-2607), Sterling Life Insurance (2219 Rimland Drive, Bellingham, WA 98227), MEAG-NY (540 Madison Avenue 6th Floor, New York, NY 10022-3213), AAIC (American Alternative Insurance Corporation – 555 College Road East, Princeton, NJ 08543), PESLIC (Princeton Excess & Surplus Lines Insurance Company – 55 College Road East Princeton, NJ 08543) Alcon Labs 015372 Mylan Laboratories 06444 Aldi Inc 010362 Nabors Drilling Usa Inc 011754 Allianz Life Insurance Company 017645 Newell Rubbermaid 008013 Allstate Insurance Company – 005094 Next Era Energy/FPL Group, Inc. 005832 EMPLOYEES ONLY (Includes: Florida Power & Light Co. and NestEra Energy) Altadis USA 007650 Nike 019490 Altra Group, Inc. 015294 Norfolk Southern Corp. 007625 American Airlines & American Airlines 005113 Northrup Grumman 007094 Credit Union- Employees & Members – Applicant must show proof of credit union membership with an ATM or Visa Check Card, voided check or Credit Union ID Card American Axle & Manufaturing 020116 Northwestern Mutual 006520 American Express Co. -

CAN FEP Companies 5004 3 M Company 5010 AAA 20609 Abbvie Corp 19500 Acadian Ambulance Service, Inc 17610 Accenture Ltd. 19619 Ac
CAN FEP Companies 5004 3 M Company 5010 AAA 20609 Abbvie Corp 19500 Acadian Ambulance Service, Inc 17610 Accenture Ltd. 19619 Acushnet Company 19724 Acushnet Company 17083 Advanced Mirco Device, Inc 20742 Aflac - Corp Only 15372 Alcon Laboratiories Inc 10362 Aldi Inc 18393 Allergan Inc 17645 Allianz Life Insurance Company 5094 Allstate Insurance Company 7650 Altadis USA Inc 5113 American Airlines 20340 American Association of Physicians 20116 American Axle & Manufacturing 5120 American Express Co 18777 American Tower 9491 Ametek 5162 Analog Devices 7372 AON Corp 6283 AP Moeller-Maersk Group 16851 Apple Inc 5177 Apria Healthcare 7313 Aramark Corporation 10662 Arbonne International 5184 Archer Daniels Midland Company 4006 ARI 7947 ARI 19909 Arizona Public Service (Aps) 5202 Astrazeneca 19127 At Properties 5207 AT&T Corp 20449 Auto Strap Transportation LLC 20502 Autodata Corporation 8478 Automatic Data Processing (ADP) 21944 Avera Health 20190 B P 20225 Babcock & Wilcox 7748 Bacardi USA, Inc 5253 Bank of America Corp 20495 Baptist Health South Florida 20495 Baptist Health South Florida 20940 Barkawi Management Consultants 5269 Bausch & Lomb 20582 BeautiControl 7383 Becton Dickinson and Companies 20749 BI Worldwide 19084 Biogen Idec 21232 Blackberry Corporation 20832 Bloomin Brand 5317 Blue Cross Blue Shield 8745 Blue Cross Blue Shield of Science 5336 Boston Science Corporation 13526 Braintree Labories, Inc 5349 Bristol-Myers Squibb 18867 Broadcom 5357 Brown-Forman 5384 Cablevision 10995 Caesars Entertainment Group 19659 Carefusion Corporation -

Renseignements Sur Les Pneus Et Garanties Des Fabricants
Renseignements sur les pneus et garanties des fabricants 18TIRE-026-BA TABLE OF CONTENTS BFGOODRICH TIRES .................................3 BRIDGESTONE/FIRESTONE ...........................25 CONTINENTAL .....................................55 FALKEN ..........................................61 GENERAL TIRE ....................................75 GOODYEAR & DUNLOP ..............................81 HANKOOK ........................................93 KUMHO ...........................................99 MICHELIN ........................................105 NEXEN ..........................................125 PIRELLI ..........................................131 TOYO TIRES ......................................137 YOKOHAMA ......................................141 1 2 BFGOODRICH® TIRES THANK YOU FOR BUYING BFGOODRICH® TIRES! With proper maintenance and care, we are sure you will enjoy driving on your new BFGoodrich® tires safely for a long, long time. As a valued customer, you are entitled to BFGoodrich® tires Quality Warranty. Some BFGoodrich® tires are covered by a limited warranty against tread wear. Please refer to the terms and conditions on page 5 of this booklet. ABOUT THIS WARRANTY As the original purchaser of a BFGoodrich® Tires brand passenger or light truck tire, you are covered by all the benefits and conditions (subject to the maintenance recommendations and safety warnings) contained in this booklet. To ensure your understanding of and compliance with the terms and conditions of this warranty, please read it carefully. It is essential -

Tire Warranty Book
Tire Information Supplement and Manufacturers Warranties TABLE OF CONTENTS TIRE INFORMATION SUPPLEMENT ................4 BFGOODRICH TIRES ...........................27 BRIDGESTONE® - FIRESTONE® ................45 CONTINENTAL TIRE ............................87 FALKEN TIRE CORPORATION ...................95 GENERAL TIRE ...............................113 GOODYEAR DUNLOP TIRES ...................121 HANKOOK TIRES .............................137 KUMHO TIRES .................................143 MICHELIN ....................................157 NEXEN TIRE ..................................185 PIRELLI TIRES .................................195 TOYO TIRES – LIMITED WARRANTY ...........215 YOKOHAMA TIRES — LIMITED WARRANTY .....257 1 2 TIRE INFORMATION SUPPLEMENT TIRES TIRES Tire Safety Information Tire safety information will cover aspects of the following information: Tire Markings, Tire Identification Numbers, Tire Terminology and Defi- nitions, Tire Pressures, and Tire Loading. Tire Markings Tire Markings 1 — U.S. DOT Safety Standards 4 — Maximum Load Code (TIN) 2 — Size Designation 5 — Maximum Pressure 3 — Service Description 6 — Treadwear, Traction and Temperature Grades NOTE: • P (Passenger) — Metric tire sizing is based on U.S. design standards. P-Metric tires have the letter “P” molded into the sidewall preceding the size designation. Example: P215/65R15 95H. • European — Metric tire sizing is based on European design standards. Tires designed to this standard have the tire size molded into the sidewall beginning with the section width. -
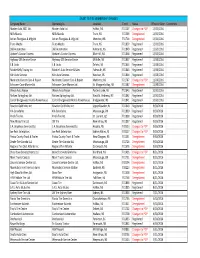
Company Name Operating As Location Tire # Status Effective Date Comments Master Auto 2001 Ltd
DIVERT NS TIRE MEMBERSHIP CHANGES Company Name Operating As Location Tire # Status Effective Date Comments Master Auto 2001 Ltd. Master Auto Ltd. Halifax, NS T01207 Changed to POP 12/31/2016 Mills Mazda Mills Mazda Truro, NS T01336 Deregistered 12/31/2016 Action Fiberglass & Mfg.Ltd. Action Fiberglass & Mfg.Ltd. Moncton, NB T01714 Deregistered 12/31/2016 Truro Mazda Truro Mazda Truro, NS T01850 Registered 12/31/2016 360 Automotive 360 Automotive Hubbards, NS T01849 Registered 12/31/2016 Upham's Carstar Express Upham's Carstar Express Bible Hill, NS T01848 Registered 12/31/2016 Highway 105 Service Center Highway 105 Service Center Millville, NS T01847 Registered 11/30/2016 S.B. Auto S.B. Auto Enfield, NS T01846 Registered 11/30/2016 Robbie Kelly Towing Inc. Robbie's Auto Service & Sales Falmouth, NS T01845 Registered 11/30/2016 Koh Auto Services Koh Auto Services Windsor, NS T01844 Registered 11/30/2016 Marinette Custom Cars & Repair Marinette Custom Cars & Repair Marinette, NS T01787 Changed to POP 11/30/2016 Schooner Cove Marine Ltd. Schooner Cove Marine Ltd. St. Margaret's Bay, NS T01587 Deregistered 11/30/2016 Weezy Auto Repair Weezy Auto Repair Porter's Lake, NS T01843 Registered 10/31/2016 Nielsen Springshop Ltd. Nielsen Springshop Ltd. West St. Andrews, NS T01842 Registered 10/31/2016 Carroll Bridgewater Honda Powerhouse Carroll Bridgewater Honda Powerhouse Bridgewater, NS T01841 Registered 10/31/2016 Rawdon Gold Mine Inc. Rawdon Gold Mine Inc. Upper Rawdon, NS T01840 Registered 9/30/2016 KIA Canada Inc. KIA Canada Inc. Mississauga, ON T01839 Registered 9/30/2016 Pirelli Tire Inc. -

SET Complete Tire & Maintenance Presents General Reliatrek Tires
SET Complete Tire & Maintenance Presents General Reliatrek Tires Part of a new, dedicated product line, the General Reliatrek and Reliatrek HT tires are ideal options for cost-conscious customers looking for options that deliver the reliable, quality performance associated with major tire brands at a lower price. All Reliatrek and Reliatrek HT tires include complimentary road hazard coverage. Reliatrek Features & Benefits Reliatrek HT Features and Benefits • VAI® (Visual Alignment Indicator) Technology shows • DURAGEN™ Technology features robust compounds, misalignment before tread life is compromised ultra high-strength steel belts, and a broad, • RTM® (Replacement Tire Monitor) Technology reads flat contour “replace tire” when it’s time for new tires • Comfort Balance™ Technology allows for a more • Strong shoulder and center rib design provide stability cushioned tread and responsiveness • StabiliTread Technology supports a flatter tread • Under-tread cushion provides a comfortable ride profile for optimized pattern stiffness and robust • Flat contour technology ensures even treadwear tread compound and longer life • 45-day customer satisfaction trial • Limited treadwear warranty (T-rated sizes: 75,000 miles; H-rated sizes: 65,000 miles; V-rated sizes: 65,000 miles) The Reliatrek and Reliatrek HT tires are designed for all-season handling and excellent durability at an exceptional value. See the next page for a complete list of fitments. For more information, please reach out to your CTM Field Manager, or contact Southeast Toyota Complete -

Leslie Price and Lafe Morley V. Ashby's Inc. and General Motors Co., Pontiac Div
Brigham Young University Law School BYU Law Digital Commons Utah Supreme Court Briefs (pre-1965) 1960 Leslie Price and Lafe Morley v. Ashby's Inc. and General Motors Co., Pontiac Div. : Brief of Appellants Utah Supreme Court Follow this and additional works at: https://digitalcommons.law.byu.edu/uofu_sc1 Part of the Law Commons Original Brief submitted to the Utah Supreme Court; funding for digitization provided by the Institute of Museum and Library Services through the Library Services and Technology Act, administered by the Utah State Library, and sponsored by the S.J. Quinney Law Library; machine- generated OCR, may contain errors. King and Hughes; Attorneys for Plaintiffs; Recommended Citation Brief of Appellant, Price v. Ashby's Inc., No. 9165 (Utah Supreme Court, 1960). https://digitalcommons.law.byu.edu/uofu_sc1/3540 This Brief of Appellant is brought to you for free and open access by BYU Law Digital Commons. It has been accepted for inclusion in Utah Supreme Court Briefs (pre-1965) by an authorized administrator of BYU Law Digital Commons. For more information, please contact [email protected]. Civil No. 9165 IN THE SUPREME COURT of the \ L E D STATE OF uTfH APR 181960 LESLIE PRICE and LAFE MORLEY, P laint~ff s, -vs.- ASHBY'S INCORPORATED, a Utah corporation; and GENERAL MOTORS CORPORATION, Pontiac Division, Defendants. BRIEF OF APPELLANTS KING AND HUGHES DwiGHT L. KING No. 205 Sentinel Building 2121 South State Street Salt Lake City, Utah Attorneys for Plaintiffs Sponsored by the S.J. Quinney Law Library. Funding for digitization provided by the Institute of Museum and Library Services Library Services and Technology Act, administered by the Utah State Library.