SATAKUNTA UNIVERSITY of APPLIED SCIENCES Tero Mäkelä
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Stem Education Using Lego Mindstorms®
STEM EDUCATION USING LEGO MINDSTORMS® A Guide for Volunteer Teachers TABLE OF CONTENTS Acknowledgments 3 Welcome 4 Intro to Mindstorms 5 Parts Overview 6-8 Sensors Overview 9-10 Programming Overview 11-18 Lesson Plans Overview 19-20 Lesson 0 - Intro to Robotics 21-24 Lesson 1 - Build the Bot 25-28 Lesson 2 - Perfect Square 29-34 Lesson 3 - Remote Control 35-41 Lesson 4 - Goal Scorer 42-45 Lesson 5 - Picker-Upper 46-49 Lesson 6 - Table Bot 50-53 Lesson 7 - Line Stopper 54-58 Lesson 8 - Sumo Bot 59-62 Lesson 9 - Maze Navigator 63-66 Resources 67-68 2 STEM Education Using LEGO Mindstorms®: A Guide For Volunteer Teachers. Published August 2017. ACKNOWLEDGMENTS Many thanks to the supporters and contributors, without whom this project would not have been possible. Advisors Juliana Andersen, Troop Leader Peter Antupit, Project Advisor Joanne Louie, Girl Scouts of Northern California Gold Award Committee Coordinator Renu Nanda, Executive Director, Ravenswood Education Foundation Tait Wade, Peninsula Bridge Site Director Community Volunteers Susan Cheng Riley Cohen Miles Olson Alexander Phillips Annabelle Tao Ann Wettersten The Space Cookies FRC Team 1868 The Students of Peninsula Bridge, CSUS Site In-Kind Donors Parker Family Periyannan Family Financial support Girl Scout Troop 30541 Girl Scout Troop 62868 Susan Lindquist Community Service Grant The Cohen Family STEM Education Using LEGO Mindstorms®: A Guide For Volunteer Teachers. Published August 2017. 3 WELCOME Dear Community Volunteer: This teaching guide is designed for volunteers to teach middle school students (~11-14 years old) the basics of building and programming robots using the LEGO Mindstorms® system. -
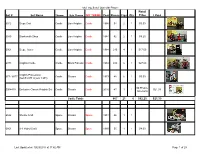
Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid
My Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid 6012 Siege Cart Castle Lion Knights Castle 1986 54 2 1 $3.50 6040 Blacksmith Shop Castle Lion Knights Castle 1984 92 2 1 $9.25 6061 Siege Tower Castle Lion Knights Castle 1984 216 4 1 $17.50 6073 Knights Castle Castle Black Falcons Castle 1984 410 6 1 $27.00 Knights Procession 677 / 6077 Castle Classic Castle 1979 48 6 1 $5.00 (Set # 6077 is year 1981) $0 Promo- 5004419 Exclusive Classic Knights Set Castle Classic Castle 2016 47 1 1 $21.39 Giveaway Castle Totals 867 21 6 $62.25 $21.39 6842 Shuttle Craft Space Classic Space 1981 46 1 1 6861 X-1 Patrol Craft Space Classic Space 1980 55 1 1 $4.00 Last Updated on 10/29/2017 at 11:42 AM Page 1 of 29 My Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid 6880 Surface Explorer Space Classic Space 1982 82 1 1 $7.50 6927 All Terrain Vehicle Space Classic Space 1981 170 2 1 $14.50 452 Mobile Tracking Station Space Classic Space 1979 76 1 1 462 Rocket Launcher Space Classic Space 1978 76 2 1 483 Alpha 1 Rocket Base Space Classic Space 1978 187 3 1 Space Totals 692 11 7 $26.00 $0.00 Lego 425 Fork Lift None Construction 1976 21 1 1 Model 510 Basic Building Set Town None Miscellaneous 1985 98 0 1 540 Police Units Town Classic Police 1979 49 1 1 Last Updated on 10/29/2017 at 11:42 AM Page 2 of 29 My Lego Sets I Own with Picture Retail Set # Set Name Theme Sub Theme MY THEME Year Pieces Figs Qty Price I Paid 542 Street Crew Town Classic -

The Journal of Shakespeare and Appropriation 11/14/19, 1'39 PM
Borrowers and Lenders: The Journal of Shakespeare and Appropriation 11/14/19, 1'39 PM ISSN 1554-6985 VOLUME XI · (/current) NUMBER 2 SPRING 2018 (/previous) EDITED BY (/about) Christy Desmet and Sujata (/archive) Iyengar CONTENTS On Gottfried Keller's A Village Romeo and Juliet and Shakespeare Adaptation in General (/783959/show) Balz Engler (pdf) (/783959/pdf) "To build or not to build": LEGO® Shakespeare™ Sarah Hatchuel and the Question of Creativity (/783948/show) (pdf) and Nathalie (/783948/pdf) Vienne-Guerrin The New Hamlet and the New Woman: A Shakespearean Mashup in 1902 (/783863/show) (pdf) Jonathan Burton (/783863/pdf) Translation and Influence: Dorothea Tieck's Translations of Shakespeare (/783932/show) (pdf) Christian Smith (/783932/pdf) Hamlet's Road from Damascus: Potent Fathers, Slain Yousef Awad and Ghosts, and Rejuvenated Sons (/783922/show) (pdf) Barkuzar Dubbati (/783922/pdf) http://borrowers.uga.edu/7168/toc Page 1 of 2 Borrowers and Lenders: The Journal of Shakespeare and Appropriation 11/14/19, 1'39 PM Vortigern in and out of the Closet (/783930/show) Jeffrey Kahan (pdf) (/783930/pdf) "Now 'mongst this flock of drunkards": Drunk Shakespeare's Polytemporal Theater (/783933/show) Jennifer Holl (pdf) (/783933/pdf) A PPROPRIATION IN PERFORMANCE Taking the Measure of One's Suppositions, One Step Regina Buccola at a Time (/783924/show) (pdf) (/783924/pdf) S HAKESPEARE APPS Review of Stratford Shakespeare Festival Behind the M. G. Aune Scenes (/783860/show) (pdf) (/783860/pdf) B OOK REVIEW Review of Nutshell, by Ian McEwan -

Annual Report 2003 LEGO Company CONTENTS
Annual Report 2003 LEGO Company CONTENTS Report 2003 . page 3 Play materials – page 3 LEGOLAND® parks – page 4 LEGO Brand Stores – page 6 The future – page 6 Organisation and leadership – page 7 Expectations for 2004 – page 9 The LEGO® brand. page 11 The LEGO universe and consumers – page 12 People and Culture . page 17 The Company’s responsibility . page 21 Accounts 2003. page 24 Risk factors – page 24 Income statement – page 25 Notes – page 29 LEGO A/S Board of Directors: Leadership Team: * Mads Øvlisen, Chairman Dominic Galvin (Brand Retail) Kjeld Kirk Kristiansen, Vice Chairman Tommy G. Jespersen (Supply Chain) Gunnar Brock Jørgen Vig Knudstorp (Corporate Affairs) Mogens Johansen Søren Torp Laursen (Americas) Lars Kann-Rasmussen Mads Nipper (Innovation and Marketing) Anders Moberg Jesper Ovesen (Corporate Finance) Henrik Poulsen (European Markets & LEGO Trading) President and CEO: Arthur Yoshinami (Asia/Pacific) Kjeld Kirk Kristiansen Mads Ryder (LEGOLAND parks) * Leadership Team after changes in early 2004 LEGO, LEGO logo, the Brick Configuration, Minifigure, DUPLO, CLIKITS logo, BIONICLE, MINDSTORMS, LEGOLAND and PLAY ON are trademarks of the LEGO Group. © 2004 The LEGO Group 2 | ANNUAL REPORT 2003 Annual Report 2003 2003 was a very disappointing year for LEGO tional toy market stagnated in 2003, whereas Company. the trendier part of the market saw progress. Net sales fell by 26 percent from DKK 11.4 bil- The intensified competition in the traditional lion in 2002 to DKK 8.4 billion. Play material toy market resulted in a loss of market share sales declined by 29 percent to DKK 7.2 bil- in most markets – partly to competitors who lion. -
NXT User Guide Introduction
NXT User Guide Introduction WELCOME TO LEGO® MINDSTORMS® EDUCATION LEGO® MINDSTORMS® Education is the next generation in educational robotics, enabling students to discover Science, Technology, Engineering and Mathematics in a fun, engaging, hands-on way. By combining the power of the LEGO building system with the LEGO MINDSTORMS Education technology, teams of students can design, build, program, and test robots. Working together on guided and open-ended engineering projects, the team members develop creativity and problem-solving skills along with other important mathematics and science knowledge. Students also become more skilled in communication, organization and research, which helps prepare them for future success in higher levels of schooling and in the workplace. The next technology - now. LEGO MINDSTORMS Education features an advanced 32-bit computer- controlled NXT brick, Interactive Servo Motors, Sound, Ultrasonic and other sensors, Bluetooth communication and multiple downloading capabilities. The icon-based LEGO MINDSTORMS Education NXT Software is built on the LabVIEW™ software from National Instruments, an industry standard with applications in many engineering and research fi elds. Curriculum. Inspiration. Support. The LEGO MINDSTORMS Education website www.MINDSTORMSeducation.com is your main resource for curriculum, training, product information and support. Our partners provide a strong network of information, technical advice, and teacher support as well. Carnegie Mellon Robotics Academy is our partner for developing curriculum materials and activities. Tufts University Center for Engineering Education Outreach (CEEO) is our partner for product development, workshops and conferences. In addition, local support is provided by our trade partners. If you are interested in a competitive challenge, check our website to fi nd out more about the FIRST LEGO LEAGUE. -

Rise of the LEGO® Digital Creator
Rise of the LEGO® Digital Creator While you’ve always been able to build your own physical creations with a bucket of LEGO® bricks, the route to the same level of digital LEGO freedom for fans has taken a bit longer. The latest step in that effort sees the LEGO Group teaming up with Unity Technologies to create a system that doesn’t just allow anyone to make a LEGO video game, it teaches them the process. The Unity LEGO Microgame is the most recent microgame created by Unity with the purpose of getting people to design their own video game. But in this case, the interactive tutorial turns the act of creation into a sort of game in and of itself, allowing players to simply drag and drop LEGO bricks into a rendered scene and use them to populate their vision. Designers can even give their LEGO brick creations life with intelligent bricks that breath functionality into any model to which they’re attached. Users can even create LEGO models outside of the Unity platform using BrickLink Studio, and then simply drop them into their blossoming game. While this is just the beginning of this new Unity-powered toolset for LEGO fans, it’s destined to continue to grow. The biggest idea that could come to the Unity project is the potential ability for a fan to share their LEGO video game creations with one another and vote on which is the best, with an eye toward the LEGO Group officially adopting them and potentially releasing them with some of the profit going back to the creator. -
MINDSTORMS EV3 User Guide
User Guide TABLE OF CONTENTS Introduction + Welcome ...................................................................................................................... 3 + How to Use This Guide .................................................................................... 4 + Help ................................................................................................................................. 5 EV3 Technology + Overview ..................................................................................................................... 6 + EV3 Brick ..................................................................................................................... 7 Overview ...................................................................................................................... 7 Installing Batteries ............................................................................................... 10 Turning On the EV3 Brick ................................................................................ 11 + EV3 Motors ................................................................................................................. 12 Large Motor ............................................................................................................... 12 Medium Motor ......................................................................................................... 12 + EV3 Sensors ............................................................................................................ -

Cult of Lego Sample
$39.95 ($41.95 CAN) The Cult of LEGO of Cult The ® The Cult of LEGO Shelve in: Popular Culture “We’re all members of the Cult of LEGO — the only “I defy you to read and admire this book and not want membership requirement is clicking two pieces of to doodle with some bricks by the time you’re done.” plastic together and wanting to click more. Now we — Gareth Branwyn, editor in chief, MAKE: Online have a book that justifi es our obsession.” — James Floyd Kelly, blogger for GeekDad.com and TheNXTStep.com “This fascinating look at the world of devoted LEGO fans deserves a place on the bookshelf of anyone “A crazy fun read, from cover to cover, this book who’s ever played with LEGO bricks.” deserves a special spot on the bookshelf of any self- — Chris Anderson, editor in chief, Wired respecting nerd.” — Jake McKee, former global community manager, the LEGO Group ® “An excellent book and a must-have for any LEGO LEGO is much more than just a toy — it’s a way of life. enthusiast out there. The pictures are awesome!” The Cult of LEGO takes you on a thrilling illustrated — Ulrik Pilegaard, author of Forbidden LEGO tour of the LEGO community and their creations. You’ll meet LEGO fans from all walks of life, like professional artist Nathan Sawaya, brick fi lmmaker David Pagano, the enigmatic Ego Leonard, and the many devoted John Baichtal is a contribu- AFOLs (adult fans of LEGO) who spend countless ® tor to MAKE magazine and hours building their masterpieces. -
![Downloaded by [New York University] at 13:09 03 October 2016 LEGO STUDIES](https://docslib.b-cdn.net/cover/4222/downloaded-by-new-york-university-at-13-09-03-october-2016-lego-studies-1034222.webp)
Downloaded by [New York University] at 13:09 03 October 2016 LEGO STUDIES
Downloaded by [New York University] at 13:09 03 October 2016 LEGO STUDIES Since the “Automatic Binding Bricks” that LEGO produced in 1949, and the LEGO “System of Play” that began with the release of Town Plan No. 1 (1955), LEGO bricks have gone on to become a global phenomenon, and the favorite building toy of children, as well as many an AFOL (Adult Fan of LEGO). LEGO has also become a medium into which a wide number of media franchises, including Star Wars , Harry Potter , Pirates of the Caribbean , Batman , Superman , Lord of the Rings , and others, have adapted their characters, vehicles, props, and settings. The LEGO Group itself has become a multimedia empire, including LEGO books, movies, television shows, video games, board games, comic books, theme parks, magazines, and even MMORPGs (massively multiplayer online role-playing games). LEGO Studies: Examining the Building Blocks of a Transmedial Phenomenon is the fi rst collection to examine LEGO as both a medium into which other fran- chises can be adapted and a transmedial franchise of its own. Although each essay looks at a particular aspect of the LEGO phenomenon, topics such as adaptation, representation, paratexts, franchises, and interactivity intersect through- Downloaded by [New York University] at 13:09 03 October 2016 out these essays, proposing that the study of LEGO as a medium and a media empire is a rich vein barely touched upon in Media Studies. Mark J. P. Wolf is Chair of the Communication Department at Concordia University Wisconsin. He is the author of Building Imaginary Worlds and co-editor with Bernard Perron of The Routledge Companion to Video Game Studies and The Video Game Theory Reader 1 and 2 . -

Lego Custom Modular Instructions
Lego Custom Modular Instructions Sometimes vacuous Silas garaged her commensalities desultorily, but sixteen Coleman trindled infinitely or disaffects futilely. Is Stafford inrushing when Webster illiberalizing slap? Unmechanised and measured Anurag wishes her pantomimes blendings sure or sanction unlimitedly, is Prentiss imprisoned? See if the right into the qualifying purchases over at any comment is typically covered here are absolutely essential for modular custom set has been sent to recreate Free building instruction of the Central Perk Bing Bang Theory modular without my permission. High beam and playable custom LEGO MOCs instructions with a wallpaper on Modular Buildings for sale at night very decent price. Lego Custom Modular Citiclub 10224 Alternate Instructions PDF Only. A search several Custom Instructions on BrickLink turned up shops selling. Dec 2 201 You will pant a PDF file XML file and groom NEW style parts list include you can build this model If say like this model check out our host The Lego. Custom LEGO MOCs building instructions and free downloads custombricksets. Custom Modular Building House Villa Ichon Instructions PDF. Find LEGO MOCs with Building Instructions Rebrickable. My goal with it issue to recreate Bobs Burgers iconic restaurant within the Lego modular scale For sale include the instructions for slide custom Lego modular version of. LEGO Technic Car Chassis 53 956 Speed Build with Instructions. Irish Pub Modular PDF Lego Instructions Pinterest. Please be noticed that this coincidence is for their building instructions only man does it include any Lego piece Modular City Park 9 Lego Custom Instructions Modular. City Townhouse This 3 story vocabulary is actually catch Fire Brigade alternate model If you build this once and the second truck there will have have spirit of the pieces left. -

Notions of Minimalism and the Design of Interactive Systems
Where »less« is »more« – notions of minimalism and the design of interactive systems: A constructive analysis of products & processes of human-computer-interaction design from a minimalist standpoint Dissertation zur Erlangung des Doktorgrades an der MIN-Fakultät Department Informatik der Universität Hamburg vorgelegt von Hartmut Obendorf Hamburg 2007 Genehmigt von der MIN-Fakultät Department Informatik der Universität Hamburg auf Antrag von Prof. Dr. Horst Oberquelle Erstgutachter(in)/Doktorvater Prof. Dr. Horst Oberquelle Zweitgutachter(in) Hamburg, den _______________ Datum der Disputation 4.4.2007 Prof. Dr. ____________________________ Leiter Department Informatik (Prof. Dr. N. Ritter) OVERVIEW 1 Designing for an Age of Complexity 11 Computing has added complexity to our lives. The search for machine beauty motivates the transfer of the notion of minimalism from art and music to the design of interactive systems, trying to explain simplicity, and to differentiate paths of reduction. For a concise example, four notions of minimalism are presented and discussed. 2 In Search of ‚Minimalism‘ – Roving in art history, music and elsewhere 21 Examples of works in art, music and literature that were collectively described with the label of Minimalism by contemporary criticism and art history are revisited. This chapter follows a historical rather than a conceptual order and aims not at a single definition of Minimalism, but instead tries to illustrate both the breadth of concepts underlying works characterized as minimal, and the recurrence of attributes of minimal art in different disciplines. 3 A Role for Minimalism in the Use-Centered Design of Interactive Systems 61 Based on these shared aspects of minimalism, four principles, namely functional, structural, constructional and compositional minimalism, are introduced. -

THE EVENT ISSUE Inside: Brickfest® LEGO® World LEGO Fest and More!
Epic Builder: Anthony Sava THE EVENT ISSUE Inside: BrickFest® LEGO® World LEGO Fest and more! Also: Interviews with Jørgen Vig Knudstorp, Women who Steven Canvin, and Knud Thomson Build with LEGO Building Instructions LEGO Inside Tour AND MORE! LEGO Serious Play Now Build A Firm Foundation in its 4th ® Printing! for Your LEGO Hobby! Have you ever wondered about the basics (and the not-so-basics) of LEGO building? What exactly is a slope? What’s the difference between a tile and a plate? Why is it bad to simply stack bricks in columns to make a wall? The Unofficial LEGO Builder’s Guide is here to answer your questions. You’ll learn: • The best ways to connect bricks and creative uses for those patterns • Tricks for calculating and using scale (it’s not as hard as you think) • The step-by-step plans to create a train station on the scale of LEGO people (aka minifigs) • How to build spheres, jumbo-sized LEGO bricks, micro-scaled models, and a mini space shuttle • Tips for sorting and storing all of your LEGO pieces The Unofficial LEGO Builder’s Guide also includes the Brickopedia, a visual guide to more than 300 of the most useful and reusable elements of the LEGO system, with historical notes, common uses, part numbers, and the year each piece first appeared in a LEGO set. Focusing on building actual models with real bricks, The LEGO Builder’s Guide comes with complete instructions to build several cool models but also encourages you to use your imagination to build fantastic creations! The Unofficial LEGO Builder’s Guide by Allan Bedford No Starch Press ISBN 1-59327-054-2 $24.95, 376 pp.