A Thesis Entitled a Study of Control Systems for Brushless DC Motors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory Aaron Farley University of Arkansas, Fayetteville
University of Arkansas, Fayetteville ScholarWorks@UARK Theses and Dissertations 5-2012 Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory Aaron Farley University of Arkansas, Fayetteville Follow this and additional works at: http://scholarworks.uark.edu/etd Part of the Electro-Mechanical Systems Commons Recommended Citation Farley, Aaron, "Design and Implementation of a Small Electric Motor Dynamometer for Mechanical Engineering Undergraduate Laboratory" (2012). Theses and Dissertations. 336. http://scholarworks.uark.edu/etd/336 This Thesis is brought to you for free and open access by ScholarWorks@UARK. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of ScholarWorks@UARK. For more information, please contact [email protected], [email protected]. DESIGN AND IMPLEMENTATION OF A SMALL ELECTRIC MOTOR DYNAMOMETER FOR MECHANICAL ENGINEERING UNDERGRADUATE LABORATORY DESIGN AND IMPLEMENTATION OF A SMALL ELECTRIC MOTOR DYNAMOMETER FOR MECHANICAL ENGINEERING UNDERGRADUATE LABORATORY A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering By Aaron Farley University of Arkansas Bachelor of Science in Mechanical Engineering, 2001 May 2012 University of Arkansas ABSTRACT This thesis set out to design and implement a new experiment for use in the second lab of the laboratory curriculum in the Mechanical Engineering Department at the University of Arkansas in Fayetteville, AR. The second of three labs typically consists of data acquisition and the real world measurements of concepts learned in the classes at the freshman and sophomore level. This small electric motor dynamometer was designed to be a table top lab setup allowing students to familiarize themselves with forces, torques, angular velocity and the sensors used to measure those quantities, i.e. -

Laboratory Unit to Test the Performance of Electric Motor
Misr J. Ag. Eng., 32 (1): 121 - 130 FARM MACHINERY AND POWER LABORATORY UNIT TO TEST THE PERFORMANCE OF ELECTRIC MOTOR Sehsah, E.E.* ABSTRACT Electric motors are widely used in the agricultural industry, yet many researcher and students in Egypt need to understand their basic operating characteristics. Designed laboratory activities can provide an accepted method for students under Egyptian conditions to observe and actively study motor operation. However, commercially available electric motor test are prohibitively expensive for many agricultural systems of technology at the University level. The aim of the current study was to develop the construction and evaluation of an inexpensive unit test for electric motor that allows students to actively study the power output, efficiency, and power factor of small, fractional horsepower AC and DC electric motors. Prony brake laboratory unit test may be easy to measure and determine the power efficiency and power factor for AC motors. The power efficiency was 91% for N3-70 AC motor comparing with 87.3% , 83.7 % and 70.3 % for DC motor KAG, DC motor MNB and AC motor turbo respectively. Keywords: power factor, electric motor, performance, unit test INTRODUCTION griculture is a major consumer of electricity. According to Nadel et al. (2002), electric motors provide more than 80% of A all non-vehicular shaft power and consume over 60% of the electrical energy generated in the U.S. Schumacher et al. (2002) found that unit leaders in university agricultural systems management programs perceived that electricity/electronics was the most important subject matter area for future curriculum emphasis. According to Gustafson (1988), all agriculture majors should receive instruction in electricity. -
Use Style: Paper Title
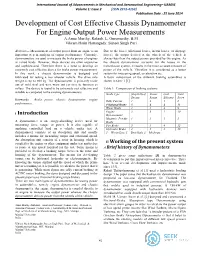
International Journal of Advancements in Mechanical and Aeronautical Engineering– IJAMAE Volume 1: Issue 2 [ISSN 2372-4153] Publication Date : 25 June 2014 Development of Cost Effective Chassis Dynamometer For Engine Output Power Measurements A.Amar Murthy, Rakesh. L, Gurumurthy. B.M Vikram Harin Hattangady, Suneet Singh Puri Abstract— Measurement of output power from an engine is an Due to the losses (frictional losses, inertia losses, or slippage important step in analysis of engine performance. Currently, losses), the output derived at the wheels of the vehicle is dynamometers are used to measure the brake power of engines always less than the output power provided by the engine. As at varied loads. However, these devices are often expensive the chassis dynamometer accounts for the losses in the and sophisticated. Therefore there is a need to develop an transmission system, it results in the most accurate measure of extremely cost effective device for brake power measurement. power of the vehicle. Therefore it is considered as a better In this work, a chassis dynamometer is designed and system for measuring speed, acceleration etc. fabricated for testing a two wheeler vehicle. The drive axle A basic comparison of the different braking assemblies is weight is up to 800 kg. The dynamometer is primarily made shown in table 1 [1]: out of mild steel and uses worn out car tires to function as rollers. The device is found to be extremely cost effective and Table 1: Comparison of braking systems reliable as compared to the existing dynamometers. Brake Type Simplicity of Power Cost Total Design Range Efficient Score Keywords— Brake power, chassis dynamometer, engine Eddy Current 1 4 1 6 performance. -
AW Dyno I-Series Engine Dynamometer
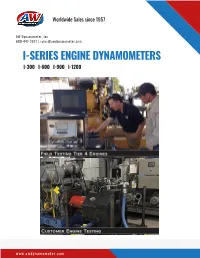
Worldwide Sales since 1957 AW Dynamometer, Inc. 800-447-2511 | [email protected] I-SERIES ENGINE DYNAMOMETERS I-300 I-600 I-900 I-1200 w w w . a w d y n a m o m e t e r . c o m Worldwide Sales since 1957 AW Dynamometer, Inc. 800-447-2511 | [email protected] I-SERIES ENGINE DYNAMOMETERS REPUTATION AW has long been known for its dependability and longevity. Since 1957, AW has sold over 14,000 units worldwide. We are committed to manufacturing a heavy duty, high quality, highly accurate product and then backing it up with the best support and service to provide our customers with complete satisfaction. HIGH TORQUE LOADS. LOW RPM. AW I-Series Dynamometers excel at providing high torque loads at low RPM ranges, making this series of dynamometers an excellent choice for diesel engine testing as well as other applications. The I-Series load unit consists of a heavy duty hydraulicly activated prony brake which has the unique feature of providing maximum torque load at low RPM. The design of this load unit also provides for a stable torque load and RPM set point with moderate ramp rates. w w w . a w d y n a m o m e t e r . c o m Worldwide Sales since 1957 AW Dynamometer, Inc. 800-447-2511 | [email protected] I-SERIES ENGINE DYNAMOMETERS MODELS AW I-Series Dynamometers come in four different models all using the same basic design. The models increase proportionally in horsepower and torque with the addition of power load units. -
University of Cincinnati
UNIVERSITY OF CINCINNATI Date: October 31, 2006 I, Ryan Lake_________________________________________________, hereby submit this work as part of the requirements for the degree of: Master of Science in: Mechanical Engineering It is entitled: Integration of a Small Engine Dynamometer into an Eddy Current Controlled Chassis Dynamometer This work and its defense approved by: Chair: Dr. Randall Allemang___________ Dr. David Thompson_____________ Dr. Jay Kim _ _______________________________ _______________________________ Integration of a Small Engine Dynamometer into an Eddy Current Controlled Chassis Dynamometer A thesis submitted to the Graduate School of the University of Cincinnati In partial fulfillment of the requirements for the degree of MASTER OF SCIENCE In the Department of Mechanical, Industrial, and Nuclear Engineering of the College of Engineering 2006 By Ryan Douglas Lake B.S., University of Cincinnati, 2004 Committee Chair: Dr. Randall Allemang Committee: Dr. David Thompson Dr. Jay Kim Abstract The task of tuning an engine from scratch can be very time consuming and difficult if the right equipment is not utilized. Several different types of dynamometers with feedback control systems exist that enable a tuner to simplify the process. However, most of these systems are designed for specific applications and engines. Typically, the proper equipment is determined based on the budget and requirements of the tuner. The most common engines for Formula SAE (FSAE) cars are usually motorcycle engines or something similar. Unlike the usual car engines, which have separate transmissions, these engines and transmissions are built together. A complete custom engine dynamometer stand and corresponding connection between the transmission output shaft and the dynamometer is necessary. Different types of dynamometers were researched to determine their pros and cons. -

Unit 12 Size and Performance Measurement
unit 12 size and performance measurement Small engines are described and compared by a number of measurements related to size and per• formance. Measurements of engine size are con• cerned with an engine's bore, stroke displacement and compression ratio. These measurements determine how much power an engine can develop. The amount of power an engine actually develops is specified in terms of performance measurement called horsepower. The concept of horsepower is based upon a number of scientific principles such as force, work, power, energy and efficiency. Each of these principles is explained below. LET'S FIND OUT: When you finish reading and studying this unit, you should be able to: 1. Understand the size measurements based on bore, stroke, dis• placement and compression ratio. 2. Identify the elements of small-engine performance measurement for linear horsepower. 3. Recognize the elements of engine rotary horsepower measurement. 4. Describe the way horsepower is measured, charted and rated. 5. Explain the different types of efficiency ratings used with small engines. ENGINE SIZE MEASUREMENTS Bore and Stroke Engines are manufactured in different sizes to The bore is the diameter of the cylinder. Figure meet different requirements. A lawnmower may 12-1. The larger the bore, the nyore powerful the have a small engine and an outboard a large one. engine. The stroke is the distance the piston Engine size comparisons are not based on the moves from the bottom of the cylinder to the top outside dimensions of an engine but on the size of or from the top to the bottom. The size of the the area where power is developed. -
Diesel Dynatronixtm Diesel Dynamometer/Mechatronics Educational Trainer
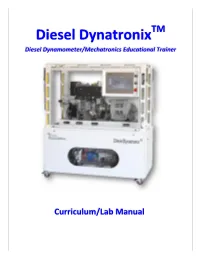
Diesel DynatronixTM Diesel Dynamometer/Mechatronics Educational Trainer Curriculum/Lab Manual Copyright October 1, 2016 All Rights Reserved-Turbine Technologies, Ltd. Table of Contents Chapter 1: Internal Combustion Engine . 4 Otto Cycle . .5 Diesel Engine . .11 Chapter 2: Dynamometers . .. 15 Brake Dynamometers . .16 Prony Brake . 16 Water Brake . .17 Eddy Current Brake . 18 Transmission Dynamometers . .19 Chassis Dynamometers . .20 Chapter 3: Diesel Dynatronix System . .21 Engine and Dynamometer . 22 Automation Suite . 23 Engine Pressure Measurements . 25 Dynamometer Excitation Loading Measurements . .26 Chapter 4: Educational Engine Performance Operations . .29 Lab Operation 1: Performance Curves . 30 Data Analysis 1: In-Depth Performance Calculations Using Air Standard Diesel Cycle . 36 Chapter 5: Feedback Loops . 40 Lab Operation 2-1: Feedback Loops-Cruise Control . .43 Lab Operation 2-2: Feedback Loops-Electric Power Generation . 46 Lab Operation 2-3: Feedback Loops-Process Water Pumping . 47 Glossary of Terms . 48 Chapter 1: Internal Combustion Engine The internal combustion engine (IC) is the most common power-producing device on earth and predominantly uses a piston-cylinder configuration. It is a heat engine that receives heat at a high temperature because of combustion (burning) of fuel inside the engine. The fuel is usually a hydrocarbon type fuel such as gasoline, kerosene or diesel fuel. Other forms of fuel such as LP Gas and methane are also used as alternative fuels. The fuel usually mixes with air inside the engine and burns rapidly, with the resulting exhaust gases being high temperature and pressure. This process is a release of chemical energy which provides the high-temperature, high-pressure gases inside the engine. -

Measurement of Mechanical Quantities, Page 1 Measurement of Mechanical Quantities Author: John M
Measurement of Mechanical Quantities, Page 1 Measurement of Mechanical Quantities Author: John M. Cimbala, Penn State University Latest revision: 08 April 2013 Introduction Some examples of mechanical quantities that need to be measured include position (or displacement), acceleration, angular velocity (rotation rate of a shaft), force, torque (moment), and shaft power. Instruments of various kinds have been invented to measure each of these quantities. In this learning module, several of these instruments are discussed; the list here is by no means exhaustive. The purpose here is to give you a feel for how mechanical instruments work, and to make you aware of the variety of ways to measure things. Position and Displacement Measurement The length unit in the SI system is the meter (m). For many years, the standard meter was defined as 1,650,763.73 wavelengths of krypton 86 (an orange-colored isotope of the element krypton) in a vacuum. The standard meter is now defined as the distance that light in a vacuum travels in 1/(299,792,458) s. Various kinds of instruments have been invented to measure distance, length, or displacement. Some of these (especially the mechanical devices) are simple and straightforward, and are discussed first. Some more sophisticated measurement devices also exist for measuring displacement, and these are discussed later. Mechanical devices Principle of operation: o A simple comparison is made between a displacement (or an object’s length) and that of a pre-measured displacement or length. o The length or displacement is inferred to be the same as that of the (known) pre-measured length. -
Design of Dynamometer for Engine Testing
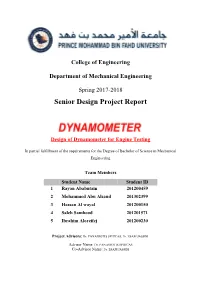
College of Engineering Department of Mechanical Engineering Spring 2017-2018 Senior Design Project Report Design of Dynamometer for Engine Testing In partial fulfillment of the requirements for the Degree of Bachelor of Science in Mechanical Engineering Team Members Student Name Student ID 1 Rayan Ababutain 201200459 2 Mohammed Abu Alsaud 201302399 3 Hassan Al wayal 201200150 4 Saleh Samhood 201201571 5 Ibrahim Aloreifej 201200230 Project Advisors: Dr. PANAGIOTIS SPHICAS, Dr. ESAM JASSIM Advisor Name: Dr. PANAGIOTIS SPHICAS Co-Advisor Name: Dr. ESAM JASSIM Abstract Strict emission regulations for vehicles and advances in automotive technology, dictate the thorough testing of engines, fuels and emissions. In past work at PMU, a port fuel injection engine was assembled and tested on biofuel blends. However, the engine was operating on free load. To simulate the effect of load torque on the engine, in this project, we design a break dynamometer. The dynamometer consists of a flange to mount on the PMU engine, a break array, a strain gage, and protective covers. The students will have to perform extensive stresses calculations and FEA analysis prior to manufacturing. 2 Acknowledgments We are group of five mechanical engineering students, we have divided the work based on strength and weaknesses of each member. One member is in charge of Solid Design program, while others were in charge of Ordering parts, taking measurements, calculations, and organization of the project report. In addition, the support of our project advisor can’t be denied. The printed table of the portfolio will show the tasks each member. 3 List of Figures: Figure 1.1 Parts getting assembled ................................................................ -

Dynamometer - Wikipedia, the Free Encyclopedia Page 1 of 11
Dynamometer - Wikipedia, the free encyclopedia Page 1 of 11 Dynamometer From Wikipedia, the free encyclopedia For the dynamometer used in railroading, see dynamometer car. A dynamometer or "dyno" for short, is a device for measuring force or power. For example, the power produced by an engine, motor or other rotating prime mover can be calculated by simultaneously measuring torque and rotational speed (rpm). A dynamometer can also be used to determine the torque and power required to operate a driven machine such as a pump. In that case, a motoring or driving dynamometer is used. A dynamometer that is designed to be driven is called an absorption or passive dynamometer. A dynamometer that can either drive or absorb is called a universal or active dynamometer. In addition to being used to determine the torque or power characteristics of a machine under test (MUT), dynamometers are employed in a number of other roles. In standard emissions testing cycles such as those defined by the US Environmental Protection Agency (US EPA), dynamometers are used to provide simulated road loading of either the engine (using an engine dynamometer) or full powertrain (using a chassis dynamometer). In fact, beyond simple power and torque measurements, dynamometers can be used as part of a testbed for a variety of engine development activities such as the calibration of engine management controllers, detailed investigations into combustion behavior and tribology. In the medical realm, hand dynamometers are used for routine screening of grip strength and initial and ongoing evaluation of patients with hand trauma and dysfunction. They are also used to measure grip strength in patients where compromise of the cervical nerve roots or peripheral nerves is suspected.