Chapter 4: Frequency Domain and Fourier Transforms
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -
The Fast Fourier Transform
The Fast Fourier Transform Derek L. Smith SIAM Seminar on Algorithms - Fall 2014 University of California, Santa Barbara October 15, 2014 Table of Contents History of the FFT The Discrete Fourier Transform The Fast Fourier Transform MP3 Compression via the DFT The Fourier Transform in Mathematics Table of Contents History of the FFT The Discrete Fourier Transform The Fast Fourier Transform MP3 Compression via the DFT The Fourier Transform in Mathematics Navigating the Origins of the FFT The Royal Observatory, Greenwich, in London has a stainless steel strip on the ground marking the original location of the prime meridian. There's also a plaque stating that the GPS reference meridian is now 100m to the east. This photo is the culmination of hundreds of years of mathematical tricks which answer the question: How to construct a more accurate clock? Or map? Or star chart? Time, Location and the Stars The answer involves a naturally occurring reference system. Throughout history, humans have measured their location on earth, in order to more accurately describe the position of astronomical bodies, in order to build better time-keeping devices, to more successfully navigate the earth, to more accurately record the stars... and so on... and so on... Time, Location and the Stars Transoceanic exploration previously required a vessel stocked with maps, star charts and a highly accurate clock. Institutions such as the Royal Observatory primarily existed to improve a nations' navigation capabilities. The current state-of-the-art includes atomic clocks, GPS and computerized maps, as well as a whole constellation of government organizations. -

Moving Average Filters
CHAPTER 15 Moving Average Filters The moving average is the most common filter in DSP, mainly because it is the easiest digital filter to understand and use. In spite of its simplicity, the moving average filter is optimal for a common task: reducing random noise while retaining a sharp step response. This makes it the premier filter for time domain encoded signals. However, the moving average is the worst filter for frequency domain encoded signals, with little ability to separate one band of frequencies from another. Relatives of the moving average filter include the Gaussian, Blackman, and multiple- pass moving average. These have slightly better performance in the frequency domain, at the expense of increased computation time. Implementation by Convolution As the name implies, the moving average filter operates by averaging a number of points from the input signal to produce each point in the output signal. In equation form, this is written: EQUATION 15-1 Equation of the moving average filter. In M &1 this equation, x[ ] is the input signal, y[ ] is ' 1 % y[i] j x [i j ] the output signal, and M is the number of M j'0 points used in the moving average. This equation only uses points on one side of the output sample being calculated. Where x[ ] is the input signal, y[ ] is the output signal, and M is the number of points in the average. For example, in a 5 point moving average filter, point 80 in the output signal is given by: x [80] % x [81] % x [82] % x [83] % x [84] y [80] ' 5 277 278 The Scientist and Engineer's Guide to Digital Signal Processing As an alternative, the group of points from the input signal can be chosen symmetrically around the output point: x[78] % x[79] % x[80] % x[81] % x[82] y[80] ' 5 This corresponds to changing the summation in Eq. -

Power Grid Topology Classification Based on Time Domain Analysis
Power Grid Topology Classification Based on Time Domain Analysis Jia He, Maggie X. Cheng and Mariesa L. Crow, Fellow, IEEE Abstract—Power system monitoring is significantly im- all depend on the correct network topology information. proved with the use of Phasor Measurement Units (PMUs). Topology change, no matter what caused it, must be The availability of PMU data and recent advances in ma- immediately updated. An unattended topology error may chine learning together enable advanced data analysis that lead to cascading power outages and cause large scale is critical for real-time fault detection and diagnosis. This blackout ( [2], [3]). In this paper, we demonstrate that paper focuses on the problem of power line outage. We use a machine learning framework and consider the problem using a machine learning approach and real-time mea- of line outage identification as a classification problem in surement data we can timely and accurately identify the machine learning. The method is data-driven and does outage location. We leverage PMU data and consider not rely on the results of other analysis such as power the task of identifying the location of line outage as flow analysis and solving power system equations. Since it a classification problem. The methods can be applied does not involve using power system parameters to solve in real-time. Although training a classifier can be time- equations, it is applicable even when such parameters are consuming, the prediction of power line status can be unavailable. The proposed method uses only voltage phasor done in real-time. angles obtained from PMUs. -

The Convolution Theorem
Module 2 : Signals in Frequency Domain Lecture 18 : The Convolution Theorem Objectives In this lecture you will learn the following We shall prove the most important theorem regarding the Fourier Transform- the Convolution Theorem We are going to learn about filters. Proof of 'the Convolution theorem for the Fourier Transform'. The Dual version of the Convolution Theorem Parseval's theorem The Convolution Theorem We shall in this lecture prove the most important theorem regarding the Fourier Transform- the Convolution Theorem. It is this theorem that links the Fourier Transform to LSI systems, and opens up a wide range of applications for the Fourier Transform. We shall inspire its importance with an application example. Modulation Modulation refers to the process of embedding an information-bearing signal into a second carrier signal. Extracting the information- bearing signal is called demodulation. Modulation allows us to transmit information signals efficiently. It also makes possible the simultaneous transmission of more than one signal with overlapping spectra over the same channel. That is why we can have so many channels being broadcast on radio at the same time which would have been impossible without modulation There are several ways in which modulation is done. One technique is amplitude modulation or AM in which the information signal is used to modulate the amplitude of the carrier signal. Another important technique is frequency modulation or FM, in which the information signal is used to vary the frequency of the carrier signal. Let us consider a very simple example of AM. Consider the signal x(t) which has the spectrum X(f) as shown : Why such a spectrum ? Because it's the simplest possible multi-valued function. -

Lecture 7: Fourier Series and Complex Power Series 1 Fourier
Math 1d Instructor: Padraic Bartlett Lecture 7: Fourier Series and Complex Power Series Week 7 Caltech 2013 1 Fourier Series 1.1 Definitions and Motivation Definition 1.1. A Fourier series is a series of functions of the form 1 C X + (a sin(nx) + b cos(nx)) ; 2 n n n=1 where C; an; bn are some collection of real numbers. The first, immediate use of Fourier series is the following theorem, which tells us that they (in a sense) can approximate far more functions than power series can: Theorem 1.2. Suppose that f(x) is a real-valued function such that • f(x) is continuous with continuous derivative, except for at most finitely many points in [−π; π]. • f(x) is periodic with period 2π: i.e. f(x) = f(x ± 2π), for any x 2 R. C P1 Then there is a Fourier series 2 + n=1 (an sin(nx) + bn cos(nx)) such that 1 C X f(x) = + (a sin(nx) + b cos(nx)) : 2 n n n=1 In other words, where power series can only converge to functions that are continu- ous and infinitely differentiable everywhere the power series is defined, Fourier series can converge to far more functions! This makes them, in practice, a quite useful concept, as in science we'll often want to study functions that aren't always continuous, or infinitely differentiable. A very specific application of Fourier series is to sound and music! Specifically, re- call/observe that a musical note with frequency f is caused by the propogation of the lon- gitudinal wave sin(2πft) through some medium. -

Reception of Low Frequency Time Signals
Reprinted from I-This reDort show: the Dossibilitks of clock svnchronization using time signals I 9 transmitted at low frequencies. The study was madr by obsirvins pulses Vol. 6, NO. 9, pp 13-21 emitted by HBC (75 kHr) in Switxerland and by WWVB (60 kHr) in tha United States. (September 1968), The results show that the low frequencies are preferable to the very low frequencies. Measurementi show that by carefully selecting a point on the decay curve of the pulse it is possible at distances from 100 to 1000 kilo- meters to obtain time measurements with an accuracy of +40 microseconds. A comparison of the theoretical and experimental reiulb permib the study of propagation conditions and, further, shows the drsirability of transmitting I seconds pulses with fixed envelope shape. RECEPTION OF LOW FREQUENCY TIME SIGNALS DAVID H. ANDREWS P. E., Electronics Consultant* C. CHASLAIN, J. DePRlNS University of Brussels, Brussels, Belgium 1. INTRODUCTION parisons of atomic clocks, it does not suffice for clock For several years the phases of VLF and LF carriers synchronization (epoch setting). Presently, the most of standard frequency transmitters have been monitored accurate technique requires carrying portable atomic to compare atomic clock~.~,*,3 clocks between the laboratories to be synchronized. No matter what the accuracies of the various clocks may be, The 24-hour phase stability is excellent and allows periodic synchronization must be provided. Actually frequency calibrations to be made with an accuracy ap- the observed frequency deviation of 3 x 1o-l2 between proaching 1 x 10-11. It is well known that over a 24- cesium controlled oscillators amounts to a timing error hour period diurnal effects occur due to propagation of about 100T microseconds, where T, given in years, variations. -

GRAMMAR of SOLRESOL Or the Universal Language of François SUDRE
GRAMMAR OF SOLRESOL or the Universal Language of François SUDRE by BOLESLAS GAJEWSKI, Professor [M. Vincent GAJEWSKI, professor, d. Paris in 1881, is the father of the author of this Grammar. He was for thirty years the president of the Central committee for the study and advancement of Solresol, a committee founded in Paris in 1869 by Madame SUDRE, widow of the Inventor.] [This edition from taken from: Copyright © 1997, Stephen L. Rice, Last update: Nov. 19, 1997 URL: http://www2.polarnet.com/~srice/solresol/sorsoeng.htm Edits in [brackets], as well as chapter headings and formatting by Doug Bigham, 2005, for LIN 312.] I. Introduction II. General concepts of solresol III. Words of one [and two] syllable[s] IV. Suppression of synonyms V. Reversed meanings VI. Important note VII. Word groups VIII. Classification of ideas: 1º simple notes IX. Classification of ideas: 2º repeated notes X. Genders XI. Numbers XII. Parts of speech XIII. Number of words XIV. Separation of homonyms XV. Verbs XVI. Subjunctive XVII. Passive verbs XVIII. Reflexive verbs XIX. Impersonal verbs XX. Interrogation and negation XXI. Syntax XXII. Fasi, sifa XXIII. Partitive XXIV. Different kinds of writing XXV. Different ways of communicating XXVI. Brief extract from the dictionary I. Introduction In all the business of life, people must understand one another. But how is it possible to understand foreigners, when there are around three thousand different languages spoken on earth? For everyone's sake, to facilitate travel and international relations, and to promote the progress of beneficial science, a language is needed that is easy, shared by all peoples, and capable of serving as a means of interpretation in all countries. -

10 - Pathways to Harmony, Chapter 1
Pathways to Harmony, Chapter 1. The Keyboard and Treble Clef Chapter 2. Bass Clef In this chapter you will: 1.Write bass clefs 2. Write some low notes 3. Match low notes on the keyboard with notes on the staff 4. Write eighth notes 5. Identify notes on ledger lines 6. Identify sharps and flats on the keyboard 7.Write sharps and flats on the staff 8. Write enharmonic equivalents date: 2.1 Write bass clefs • The symbol at the beginning of the above staff, , is an F or bass clef. • The F or bass clef says that the fourth line of the staff is the F below the piano’s middle C. This clef is used to write low notes. DRAW five bass clefs. After each clef, which itself includes two dots, put another dot on the F line. © Gilbert DeBenedetti - 10 - www.gmajormusictheory.org Pathways to Harmony, Chapter 1. The Keyboard and Treble Clef 2.2 Write some low notes •The notes on the spaces of a staff with bass clef starting from the bottom space are: A, C, E and G as in All Cows Eat Grass. •The notes on the lines of a staff with bass clef starting from the bottom line are: G, B, D, F and A as in Good Boys Do Fine Always. 1. IDENTIFY the notes in the song “This Old Man.” PLAY it. 2. WRITE the notes and bass clefs for the song, “Go Tell Aunt Rhodie” Q = quarter note H = half note W = whole note © Gilbert DeBenedetti - 11 - www.gmajormusictheory.org Pathways to Harmony, Chapter 1. -

Fourier Series
Academic Press Encyclopedia of Physical Science and Technology Fourier Series James S. Walker Department of Mathematics University of Wisconsin–Eau Claire Eau Claire, WI 54702–4004 Phone: 715–836–3301 Fax: 715–836–2924 e-mail: [email protected] 1 2 Encyclopedia of Physical Science and Technology I. Introduction II. Historical background III. Definition of Fourier series IV. Convergence of Fourier series V. Convergence in norm VI. Summability of Fourier series VII. Generalized Fourier series VIII. Discrete Fourier series IX. Conclusion GLOSSARY ¢¤£¦¥¨§ Bounded variation: A function has bounded variation on a closed interval ¡ ¢ if there exists a positive constant © such that, for all finite sets of points "! "! $#&% (' #*) © ¥ , the inequality is satisfied. Jordan proved that a function has bounded variation if and only if it can be expressed as the difference of two non-decreasing functions. Countably infinite set: A set is countably infinite if it can be put into one-to-one £0/"£ correspondence with the set of natural numbers ( +,£¦-.£ ). Examples: The integers and the rational numbers are countably infinite sets. "! "!;: # # 123547698 Continuous function: If , then the function is continuous at the point : . Such a point is called a continuity point for . A function which is continuous at all points is simply referred to as continuous. Lebesgue measure zero: A set < of real numbers is said to have Lebesgue measure ! $#¨CED B ¢ £¦¥ zero if, for each =?>A@ , there exists a collection of open intervals such ! ! D D J# K% $#L) ¢ £¦¥ ¥ ¢ = that <GFIH and . Examples: All finite sets, and all countably infinite sets, have Lebesgue measure zero. "! "! % # % # Odd and even functions: A function is odd if for all in its "! "! % # # domain. -
Finding Pi Project
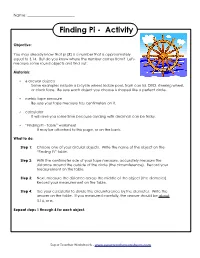
Name: ________________________ Finding Pi - Activity Objective: You may already know that pi (π) is a number that is approximately equal to 3.14. But do you know where the number comes from? Let's measure some round objects and find out. Materials: • 6 circular objects Some examples include a bicycle wheel, kiddie pool, trash can lid, DVD, steering wheel, or clock face. Be sure each object you choose is shaped like a perfect circle. • metric tape measure Be sure your tape measure has centimeters on it. • calculator It will save you some time because dividing with decimals can be tricky. • “Finding Pi - Table” worksheet It may be attached to this page, or on the back. What to do: Step 1: Choose one of your circular objects. Write the name of the object on the “Finding Pi” table. Step 2: With the centimeter side of your tape measure, accurately measure the distance around the outside of the circle (the circumference). Record your measurement on the table. Step 3: Next, measure the distance across the middle of the object (the diameter). Record your measurement on the table. Step 4: Use your calculator to divide the circumference by the diameter. Write the answer on the table. If you measured carefully, the answer should be about 3.14, or π. Repeat steps 1 through 4 for each object. Super Teacher Worksheets - www.superteacherworksheets.com Name: ________________________ “Finding Pi” Table Measure circular objects and complete the table below. If your measurements are accurate, you should be able to calculate the number pi (3.14). Is your answer name of circumference diameter circumference ÷ approximately circular object measurement (cm) measurement (cm) diameter equal to π? 1. -

Random Signals
Chapter 8 RANDOM SIGNALS Signals can be divided into two main categories - deterministic and random. The term random signal is used primarily to denote signals, which have a random in its nature source. As an example we can mention the thermal noise, which is created by the random movement of electrons in an electric conductor. Apart from this, the term random signal is used also for signals falling into other categories, such as periodic signals, which have one or several parameters that have appropriate random behavior. An example is a periodic sinusoidal signal with a random phase or amplitude. Signals can be treated either as deterministic or random, depending on the application. Speech, for example, can be considered as a deterministic signal, if one specific speech waveform is considered. It can also be viewed as a random process if one considers the ensemble of all possible speech waveforms in order to design a system that will optimally process speech signals, in general. The behavior of stochastic signals can be described only in the mean. The description of such signals is as a rule based on terms and concepts borrowed from probability theory. Signals are, however, a function of time and such description becomes quickly difficult to manage and impractical. Only a fraction of the signals, known as ergodic, can be handled in a relatively simple way. Among those signals that are excluded are the class of the non-stationary signals, which otherwise play an essential part in practice. Working in frequency domain is a powerful technique in signal processing. While the spectrum is directly related to the deterministic signals, the spectrum of a ran- dom signal is defined through its correlation function.