Barcodes: the Persistent Topology of Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Betti Numbers of Finite Volume Orbifolds 10
BETTI NUMBERS OF FINITE VOLUME ORBIFOLDS IDDO SAMET Abstract. We prove that the Betti numbers of a negatively curved orbifold are linearly bounded by its volume, generalizing a theorem of Gromov which establishes this bound for manifolds. An imme- diate corollary is that Betti numbers of a lattice in a rank-one Lie group are linearly bounded by its co-volume. 1. Introduction Let X be a Hadamard manifold, i.e. a connected, simply-connected, complete Riemannian manifold of non-positive curvature normalized such that −1 ≤ K ≤ 0. Let Γ be a discrete subgroup of Isom(X). If Γ is torsion-free then X=Γ is a Riemannian manifold. If Γ has torsion elements, then X=Γ has a structure of an orbifold. In both cases, the Riemannian structure defines the volume of X=Γ. An important special case is that of symmetric spaces X = KnG, where G is a connected semisimple Lie group without center and with no compact factors, and K is a maximal compact subgroup. Then X is non-positively curved, and G is the connected component of Isom(X). In this case, X=Γ has finite volume iff Γ is a lattice in G. The curvature of X is non-positive if rank(G) ≥ 2, and is negative if rank(G) = 1. In many cases, the volume of negatively curved manifold controls the complexity of its topology. A manifestation of this phenomenon is the celebrated theorem of Gromov [3, 10] stating that if X has sectional curvature −1 ≤ K < 0 then Xn (1) bi(X=Γ) ≤ Cn · vol(X=Γ); i=0 where bi are Betti numbers w.r.t. -

Cusp and B1 Growth for Ball Quotients and Maps Onto Z with Finitely
Cusp and b1 growth for ball quotients and maps onto Z with finitely generated kernel Matthew Stover∗ Temple University [email protected] August 8, 2018 Abstract 2 Let M = B =Γ be a smooth ball quotient of finite volume with first betti number b1(M) and let E(M) ≥ 0 be the number of cusps (i.e., topological ends) of M. We study the growth rates that are possible in towers of finite-sheeted coverings of M. In particular, b1 and E have little to do with one another, in contrast with the well-understood cases of hyperbolic 2- and 3-manifolds. We also discuss growth of b1 for congruence 2 3 arithmetic lattices acting on B and B . Along the way, we provide an explicit example of a lattice in PU(2; 1) admitting a homomorphism onto Z with finitely generated kernel. Moreover, we show that any cocompact arithmetic lattice Γ ⊂ PU(n; 1) of simplest type contains a finite index subgroup with this property. 1 Introduction Let Bn be the unit ball in Cn with its Bergman metric and Γ be a torsion-free group of isometries acting discretely with finite covolume. Then M = Bn=Γ is a manifold with a finite number E(M) ≥ 0 of cusps. Let b1(M) = dim H1(M; Q) be the first betti number of M. One purpose of this paper is to describe possible behavior of E and b1 in towers of finite-sheeted coverings. Our examples are closely related to the ball quotients constructed by Hirzebruch [25] and Deligne{ Mostow [17, 38]. -

Notes on Elementary Martingale Theory 1 Conditional Expectations
. Notes on Elementary Martingale Theory by John B. Walsh 1 Conditional Expectations 1.1 Motivation Probability is a measure of ignorance. When new information decreases that ignorance, it changes our probabilities. Suppose we roll a pair of dice, but don't look immediately at the outcome. The result is there for anyone to see, but if we haven't yet looked, as far as we are concerned, the probability that a two (\snake eyes") is showing is the same as it was before we rolled the dice, 1/36. Now suppose that we happen to see that one of the two dice shows a one, but we do not see the second. We reason that we have rolled a two if|and only if|the unseen die is a one. This has probability 1/6. The extra information has changed the probability that our roll is a two from 1/36 to 1/6. It has given us a new probability, which we call a conditional probability. In general, if A and B are events, we say the conditional probability that B occurs given that A occurs is the conditional probability of B given A. This is given by the well-known formula P A B (1) P B A = f \ g; f j g P A f g providing P A > 0. (Just to keep ourselves out of trouble if we need to apply this to a set f g of probability zero, we make the convention that P B A = 0 if P A = 0.) Conditional probabilities are familiar, but that doesn't stop themf fromj g giving risef tog many of the most puzzling paradoxes in probability. -

On the Betti Numbers of Real Varieties
ON THE BETTI NUMBERS OF REAL VARIETIES J. MILNOR The object of this note will be to give an upper bound for the sum of the Betti numbers of a real affine algebraic variety. (Added in proof. Similar results have been obtained by R. Thom [lO].) Let F be a variety in the real Cartesian space Rm, defined by poly- nomial equations /i(xi, ■ ■ ■ , xm) = 0, ■ • • , fP(xx, ■ ■ ■ , xm) = 0. The qth Betti number of V will mean the rank of the Cech cohomology group Hq(V), using coefficients in some fixed field F. Theorem 2. If each polynomial f, has degree S k, then the sum of the Betti numbers of V is ^k(2k —l)m-1. Analogous statements for complex and/or projective varieties will be given at the end. I wish to thank W. May for suggesting this problem to me. Remark A. This is certainly not a best possible estimate. (Compare Remark B.) In the examples which I know, the sum of the Betti numbers of V is always 5=km. Consider for example the m polynomials fi(xx, ■ ■ ■ , xm) = (xi - l)(xi - 2) • • • (xi - k), where i=l, 2, • ■ • , m. These define a zero-dimensional variety, con- sisting of precisely km points. The proofs of Theorem 2 and of Theorem 1 (which will be stated later) depend on the following. Lemma 1. Let V~oERm be a zero-dimensional variety defined by poly- nomial equations fx = 0, ■ • • , fm = 0. Suppose that the gradient vectors dfx, • • • , dfm are linearly independent at each point of Vo- Then the number of points in V0 is at most equal to the product (deg fi) (deg f2) ■ ■ ■ (deg/m). -

The Theory of Filtrations of Subalgebras, Standardness and Independence
The theory of filtrations of subalgebras, standardness and independence Anatoly M. Vershik∗ 24.01.2017 In memory of my friend Kolya K. (1933{2014) \Independence is the best quality, the best word in all languages." J. Brodsky. From a personal letter. Abstract The survey is devoted to the combinatorial and metric theory of fil- trations, i. e., decreasing sequences of σ-algebras in measure spaces or decreasing sequences of subalgebras of certain algebras. One of the key notions, that of standardness, plays the role of a generalization of the no- tion of the independence of a sequence of random variables. We discuss the possibility of obtaining a classification of filtrations, their invariants, and various links to problems in algebra, dynamics, and combinatorics. Bibliography: 101 titles. Contents 1 Introduction 3 1.1 A simple example and a difficult question . .3 1.2 Three languages of measure theory . .5 1.3 Where do filtrations appear? . .6 1.4 Finite and infinite in classification problems; standardness as a generalization of independence . .9 arXiv:1705.06619v1 [math.DS] 18 May 2017 1.5 A summary of the paper . 12 2 The definition of filtrations in measure spaces 13 2.1 Measure theory: a Lebesgue space, basic facts . 13 2.2 Measurable partitions, filtrations . 14 2.3 Classification of measurable partitions . 16 ∗St. Petersburg Department of Steklov Mathematical Institute; St. Petersburg State Uni- versity Institute for Information Transmission Problems. E-mail: [email protected]. Par- tially supported by the Russian Science Foundation (grant No. 14-11-00581). 1 2.4 Classification of finite filtrations . 17 2.5 Filtrations we consider and how one can define them . -
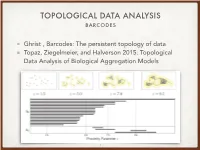
Topological Data Analysis of Biological Aggregation Models
TOPOLOGICAL DATA ANALYSIS BARCODES Ghrist , Barcodes: The persistent topology of data Topaz, Ziegelmeier, and Halverson 2015: Topological Data Analysis of Biological Aggregation Models 1 Questions in data analysis: • How to infer high dimensional structure from low dimensional representations? • How to assemble discrete points into global structures? 2 Themes in topological data analysis1 : 1. Replace a set of data points with a family of simplicial complexes, indexed by a proximity parameter. 2. View these topological complexes using the novel theory of persistent homology. 3. Encode the persistent homology of a data set as a parameterized version of a Betti number (a barcode). 1Work of Carlsson, de Silva, Edelsbrunner, Harer, Zomorodian 3 CLOUDS OF DATA Point cloud data coming from physical objects in 3-d 4 CLOUDS TO COMPLEXES Cech Rips complex complex 5 CHOICE OF PARAMETER ✏ ? USE PERSISTENT HOMOLOGY APPLICATION (TOPAZ ET AL.): BIOLOGICAL AGGREGATION MODELS Use two math models of biological aggregation (bird flocks, fish schools, etc.): Vicsek et al., D’Orsogna et al. Generate point clouds in position-velocity space at different times. Analyze the topological structure of these point clouds by calculating the first few Betti numbers. Visualize of Betti numbers using contours plots. Compare results to other measures/parameters used to quantify global behavior of aggregations. TDA AND PERSISTENT HOMOLOGY FORMING A SIMPLICIAL COMPLEX k-simplices • 1-simplex (edge): 2 points are within ✏ of each other. • 2-simplex (triangle): 3 points are pairwise within ✏ from each other EXAMPLE OF A VIETORIS-RIPS COMPLEX HOMOLOGY BOUNDARIES For k 0, create an abstract vector space C with basis consisting of the ≥ k set of k-simplices in S✏. -

An Application of Probability Theory in Finance: the Black-Scholes Formula
AN APPLICATION OF PROBABILITY THEORY IN FINANCE: THE BLACK-SCHOLES FORMULA EFFY FANG Abstract. In this paper, we start from the building blocks of probability the- ory, including σ-field and measurable functions, and then proceed to a formal introduction of probability theory. Later, we introduce stochastic processes, martingales and Wiener processes in particular. Lastly, we present an appli- cation - the Black-Scholes Formula, a model used to price options in financial markets. Contents 1. The Building Blocks 1 2. Probability 4 3. Martingales 7 4. Wiener Processes 8 5. The Black-Scholes Formula 9 References 14 1. The Building Blocks Consider the set Ω of all possible outcomes of a random process. When the set is small, for example, the outcomes of tossing a coin, we can analyze case by case. However, when the set gets larger, we would need to study the collections of subsets of Ω that may be taken as a suitable set of events. We define such a collection as a σ-field. Definition 1.1. A σ-field on a set Ω is a collection F of subsets of Ω which obeys the following rules or axioms: (a) Ω 2 F (b) if A 2 F, then Ac 2 F 1 S1 (c) if fAngn=1 is a sequence in F, then n=1 An 2 F The pair (Ω; F) is called a measurable space. Proposition 1.2. Let (Ω; F) be a measurable space. Then (1) ; 2 F k SK (2) if fAngn=1 is a finite sequence of F-measurable sets, then n=1 An 2 F 1 T1 (3) if fAngn=1 is a sequence of F-measurable sets, then n=1 An 2 F Date: August 28,2015. -

How Persistent Homology Can Be Useful in Predicting Proteins Functions
University of Rabat (Morocco) Faculty of Medicine MASTER BIOTECHNOLOGIE MEDICALE´ OPTION "BIOINFORMATIQUE" Projet Fin Annee´ (PFA) How persistent homology can be useful in predicting proteins functions Author: Zakaria Lamine Jury: President : ..... Examinator : Advisor : My Ismail Mamouni, CRMEF Rabat Soutenu le .... Dedication I dedicate this modest work to : My parents, especially my mother for all the sacrifices she has made, for all her assistance and presence in my life, my father for all his sacrifice and support. Thanks I thank GOD for giving me the strength to do this work. I thank my family for the support and the sacrifice. I thank my professor My Ismail Mamouni for his support and for all the discussions that have always been fruitful it is an honour to be one of his students. Introduction Persistent homology is a method for computing topological features of a space at different spatial resolutions. More persistent features are detected over a wide range of length and are deemed more likely to represent true features of the underlying space, rather than artifacts of sampling, noise, or particular choice of parameters. To find the persistent homology of a space, the space must first be represented as a simplicial complex. A distance function on the underlying space corresponds to a filtration of the simplicial complex, that is a nested sequence of increasing subsets. In other words persistent homology characterizes the geometric features with persistent topological invariants by defining a scale parameter relevant to topological events. Through filtration and persistence, persistent homology can capture topological structures continuously over a range of spatial scales. -

Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand
Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand To cite this version: Alexandre Dupas, Guillaume Damiand. Topologically Constrained Segmentation with Topological Maps. Workshop on Computational Topology in Image Context, Jun 2008, Poitiers, France. hal- 01517182 HAL Id: hal-01517182 https://hal.archives-ouvertes.fr/hal-01517182 Submitted on 2 May 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Topologically Constrained Segmentation with Topological Maps Alexandre Dupas1 and Guillaume Damiand2 1 XLIM-SIC, Universit´ede Poitiers, UMR CNRS 6172, Bˆatiment SP2MI, F-86962 Futuroscope Chasseneuil, France [email protected] 2 LaBRI, Universit´ede Bordeaux 1, UMR CNRS 5800, F-33405 Talence, France [email protected] Abstract This paper presents incremental algorithms used to compute Betti numbers with topological maps. Their implementation, as topological criterion for an existing bottom-up segmentation, is explained and results on artificial images are shown to illustrate the process. Keywords: Topological map, Topological constraint, Betti numbers, Segmentation. 1 Introduction In the image processing context, image segmentation is one of the main steps. Currently, most segmentation algorithms take into account color and texture of regions. Some of them also in- troduce geometrical criteria, like taking the shape of the object into account, to achieve a good segmentation. -

Mathematical Finance an Introduction in Discrete Time
Jan Kallsen Mathematical Finance An introduction in discrete time CAU zu Kiel, WS 13/14, February 10, 2014 Contents 0 Some notions from stochastics 4 0.1 Basics . .4 0.1.1 Probability spaces . .4 0.1.2 Random variables . .5 0.1.3 Conditional probabilities and expectations . .6 0.2 Absolute continuity and equivalence . .7 0.3 Conditional expectation . .8 0.3.1 σ-fields . .8 0.3.2 Conditional expectation relative to a σ-field . 10 1 Discrete stochastic calculus 16 1.1 Stochastic processes . 16 1.2 Martingales . 18 1.3 Stochastic integral . 20 1.4 Intuitive summary of some notions from this chapter . 27 2 Modelling financial markets 36 2.1 Assets and trading strategies . 36 2.2 Arbitrage . 39 2.3 Dividend payments . 41 2.4 Concrete models . 43 3 Derivative pricing and hedging 48 3.1 Contingent claims . 49 3.2 Liquidly traded derivatives . 50 3.3 Individual perspective . 54 3.4 Examples . 56 3.4.1 Forward contract . 56 3.4.2 Futures contract . 57 3.4.3 European call and put options in the binomial model . 57 3.4.4 European call and put options in the standard model . 61 3.5 American options . 63 2 CONTENTS 3 4 Incomplete markets 70 4.1 Martingale modelling . 70 4.2 Variance-optimal hedging . 72 5 Portfolio optimization 73 5.1 Maximizing expected utility of terminal wealth . 73 6 Elements of continuous-time finance 80 6.1 Continuous-time theory . 80 6.2 Black-Scholes model . 84 Chapter 0 Some notions from stochastics 0.1 Basics 0.1.1 Probability spaces This course requires a decent background in stochastics which cannot be provided here. -

4 Martingales in Discrete-Time
4 Martingales in Discrete-Time Suppose that (Ω, F, P) is a probability space. Definition 4.1. A sequence F = {Fn, n = 0, 1,...} is called a filtration if each Fn is a sub-σ-algebra of F, and Fn ⊆ Fn+1 for n = 0, 1, 2,.... In other words, a filtration is an increasing sequence of sub-σ-algebras of F. For nota- tional convenience, we define ∞ ! [ F∞ = σ Fn n=1 and note that F∞ ⊆ F. Definition 4.2. If F = {Fn, n = 0, 1,...} is a filtration, and X = {Xn, n = 0, 1,...} is a discrete-time stochastic process, then X is said to be adapted to F if Xn is Fn-measurable for each n. Note that by definition every process {Xn, n = 0, 1,...} is adapted to its natural filtration {Fn, n = 0, 1,...} where Fn = σ(X0,...,Xn). The intuition behind the idea of a filtration is as follows. At time n, all of the information about ω ∈ Ω that is known to us at time n is contained in Fn. As n increases, our knowledge of ω also increases (or, if you prefer, does not decrease) and this is captured in the fact that the filtration consists of an increasing sequence of sub-σ-algebras. Definition 4.3. A discrete-time stochastic process X = {Xn, n = 0, 1,...} is called a martingale (with respect to the filtration F = {Fn, n = 0, 1,...}) if for each n = 0, 1, 2,..., (a) X is adapted to F; that is, Xn is Fn-measurable, 1 (b) Xn is in L ; that is, E|Xn| < ∞, and (c) E(Xn+1|Fn) = Xn a.s. -

Betti Number Bounds, Applications and Algorithms
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 Betti Number Bounds, Applications and Algorithms SAUGATA BASU, RICHARD POLLACK, AND MARIE-FRANC¸OISE ROY Abstract. Topological complexity of semialgebraic sets in Rk has been studied by many researchers over the past fifty years. An important mea- sure of the topological complexity are the Betti numbers. Quantitative bounds on the Betti numbers of a semialgebraic set in terms of various pa- rameters (such as the number and the degrees of the polynomials defining it, the dimension of the set etc.) have proved useful in several applications in theoretical computer science and discrete geometry. The main goal of this survey paper is to provide an up to date account of the known bounds on the Betti numbers of semialgebraic sets in terms of various parameters, sketch briefly some of the applications, and also survey what is known about the complexity of algorithms for computing them. 1. Introduction Let R be a real closed field and S a semialgebraic subset of Rk, defined by a Boolean formula, whose atoms are of the form P = 0, P > 0, P < 0, where P ∈ P for some finite family of polynomials P ⊂ R[X1,...,Xk]. It is well known [Bochnak et al. 1987] that such sets are finitely triangulable. Moreover, if the cardinality of P and the degrees of the polynomials in P are bounded, then the number of topological types possible for S is finite [Bochnak et al. 1987]. (Here, two sets have the same topological type if they are semialgebraically homeomorphic). A natural problem then is to bound the topological complexity of S in terms of the various parameters of the formula defining S.