EXIF Estimation with Convolutional Neural Networks
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![Adobe's Extensible Metadata Platform (XMP): Background [DRAFT -- Caroline Arms, 2011-11-30]](https://docslib.b-cdn.net/cover/4654/adobes-extensible-metadata-platform-xmp-background-draft-caroline-arms-2011-11-30-104654.webp)
Adobe's Extensible Metadata Platform (XMP): Background [DRAFT -- Caroline Arms, 2011-11-30]
Adobe's Extensible Metadata Platform (XMP): Background [DRAFT -- Caroline Arms, 2011-11-30] Contents • Introduction • Adobe's XMP Toolkits • Links to Adobe Web Pages on XMP Adoption • Appendix A: Mapping of PDF Document Info (basic metadata) to XMP properties • Appendix B: Software applications that can read or write XMP metadata in PDFs • Appendix C: Creating Custom Info Panels for embedding XMP metadata Introduction Adobe's XMP (Extensible Metadata Platform: http://www.adobe.com/products/xmp/) is a mechanism for embedding metadata into content files. For example. an XMP "packet" can be embedded in PDF documents, in HTML and in image files such as TIFF and JPEG2000 as well as Adobe's own PSD format native to Photoshop. In September 2011, XMP was approved as an ISO standard.[ ISO 16684-1: Graphic technology -- Extensible metadata platform (XMP) specification -- Part 1: Data model, serialization and core properties] XMP is an application of the XML-based Resource Description Framework (RDF; http://www.w3.org/TR/2004/REC-rdf-primer-20040210/), which is a generic way to encode metadata from any scheme. RDF is designed for it to be easy to use elements from any namespace. An important application area is in publication workflows, particularly to support submission of pictures and advertisements for inclusion in publications. The use of RDF allows elements from different schemes (e.g., EXIF and IPTC for photographs) to be held in a common framework during processing workflows. There are two ways to get XMP metadata into PDF documents: • manually via a customized File Info panel (or equivalent for products from vendors other than Adobe). -
XMP SPECIFICATION PART 3 STORAGE in FILES Copyright © 2016 Adobe Systems Incorporated
XMP SPECIFICATION PART 3 STORAGE IN FILES Copyright © 2016 Adobe Systems Incorporated. All rights reserved. Adobe XMP Specification Part 3: Storage in Files NOTICE: All information contained herein is the property of Adobe Systems Incorporated. No part of this publication (whether in hardcopy or electronic form) may be reproduced or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written consent of Adobe Systems Incorporated. Adobe, the Adobe logo, Acrobat, Acrobat Distiller, Flash, FrameMaker, InDesign, Illustrator, Photoshop, PostScript, and the XMP logo are either registered trademarks or trademarks of Adobe Systems Incorporated in the United States and/or other countries. MS-DOS, Windows, and Windows NT are either registered trademarks or trademarks of Microsoft Corporation in the United States and/or other countries. Apple, Macintosh, Mac OS and QuickTime are trademarks of Apple Computer, Inc., registered in the United States and other countries. UNIX is a trademark in the United States and other countries, licensed exclusively through X/Open Company, Ltd. All other trademarks are the property of their respective owners. This publication and the information herein is furnished AS IS, is subject to change without notice, and should not be construed as a commitment by Adobe Systems Incorporated. Adobe Systems Incorporated assumes no responsibility or liability for any errors or inaccuracies, makes no warranty of any kind (express, implied, or statutory) with respect to this publication, and expressly disclaims any and all warranties of merchantability, fitness for particular purposes, and noninfringement of third party rights. Contents 1 Embedding XMP metadata in application files . -

Digital Forensics Tool Testing – Image Metadata in the Cloud
Digital Forensics Tool Testing – Image Metadata in the Cloud Philip Clark Master’s Thesis Master of Science in Information Security 30 ECTS Department of Computer Science and Media Technology Gjøvik University College, 2011 Avdeling for informatikk og medieteknikk Høgskolen i Gjøvik Postboks 191 2802 Gjøvik Department of Computer Science and Media Technology Gjøvik University College Box 191 N-2802 Gjøvik Norway Digital Forensics Tool Testing – Image Metadata in the Cloud Abstract As cloud based services are becoming a common way for users to store and share images on the internet, this adds a new layer to the traditional digital forensics examination, which could cause additional potential errors in the investigation. Courtroom forensics evidence has historically been criticised for lacking a scientific basis. This thesis aims to present an approach for testing to what extent cloud based services alter or remove metadata in the images stored through such services. To exemplify what information which could potentially reveal sensitive information through image metadata, an overview of what information is publically shared will be presented, by looking at a selective section of images published on the internet through image sharing services in the cloud. The main contributions to be made through this thesis will be to provide an overview of what information regular users give away while publishing images through sharing services on the internet, either willingly or unwittingly, as well as provide an overview of how cloud based services handle Exif metadata today, along with how a forensic practitioner can verify to what extent information through a given cloud based service is reliable. -

Development of National Digital Evidence Metadata
JOIN (Jurnal Online Informatika) Volume 4 No. 1 | Juni 2019 : 24-27 DOI: 10.15575/join.v4i1.292 Development of National Digital Evidence Metadata Bambang Sugiantoro Magister of Informatics, UIN Sunan Kalijaga, Yogyakarta, Indonesia [email protected] Abstract- The industrial era 4.0 has caused tremendous disruption in many sectors of life. The rapid development of information and communication technology has made the global industrial world undergo a revolution. The act of cyber-crime in Indonesia that utilizes computer equipment, mobile phones are increasingly increasing. The information in a file whose contents are explained about files is called metadata. The evidence items for cyber cases are divided into two types, namely physical evidence, and digital evidence. Physical evidence and digital evidence have different characteristics, the concept will very likely cause problems when applied to digital evidence. The management of national digital evidence that is associated with continued metadata is mostly carried out by researchers. Considering the importance of national digital evidence management solutions in the cyber-crime investigation process the research focused on identifying and modeling correlations with the digital image metadata security approach. Correlation analysis reads metadata characteristics, namely document files, sounds and digital evidence correlation analysis using standard file maker parameters, size, file type and time combined with digital image metadata. nationally designed the highest level of security is needed. Security-enhancing solutions can be encrypted against digital image metadata (EXIF). Read EXIF Metadata in the original digital image based on the EXIF 2.3 Standard ID Tag, then encrypt and insert it into the last line. -
JPEG Standard
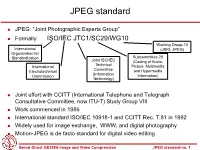
JPEG standard JPEG: “Joint Photographic Experts Group” Formally: ISO/IEC JTC1/SC29/WG10 Working Group 10 International (JBIG, JPEG) Organization for Subcommittee 29 Standardization Joint ISO/IEC (Coding of Audio, Technical International Picture, Multimedia Committee Electrotechnical and Hypermedia (Information Commission Information) Technology) Joint effort with CCITT (International Telephone and Telegraph Consultative Committee, now ITU-T) Study Group VIII Work commenced in 1986 International standard ISO/IEC 10918-1 and CCITT Rec. T.81 in 1992 Widely used for image exchange, WWW, and digital photography Motion-JPEG is de facto standard for digital video editing Bernd Girod: EE398A Image and Video Compression JPEG standard no. 1 JPEG: image partition into 8x8 block 8x8 blocks Padding of right boundary blocks Padding of lower boundary blocks Bernd Girod: EE398A Image and Video Compression JPEG standard no. 2 Baseline JPEG coder DC Huffman tables dc quantization indices Differential coding VLC Level 8x8 Uniform Compressed scalar image data input offset DCT quantization image Zig-zag Run-level scan coding VLC Compressed image data ac quantization indices Quantization tables AC Huffman tables Bernd Girod: EE398A Image and Video Compression JPEG standard no. 3 Recommended quantization tables Based on psychovisual threshold experiments Luminance Chrominance, subsampled 2:1 16 11 10 16 24 40 51 61 17 18 24 47 99 99 99 99 12 12 14 19 26 58 60 55 18 21 26 66 99 99 99 99 14 13 16 24 40 57 69 56 24 26 56 99 99 99 99 99 14 17 22 29 51 87 80 62 47 66 99 99 99 99 99 99 18 22 37 56 68 109 103 77 99 99 99 99 99 99 99 99 24 36 55 64 81 104 113 92 99 99 99 99 99 99 99 99 49 64 78 87 103 121 120 101 99 99 99 99 99 99 99 99 72 92 95 98 112 100 103 99 99 99 99 99 99 99 99 99 [JPEG Standard, Annex K] Bernd Girod: EE398A Image and Video Compression JPEG standard no. -
EXIF: a Format Is Worth a Thousand Words
NATIONAL LAW ENFORCEMENT AND CORRECTIONS TECHNOLOGY CENTER A program of the Office of Justice Programs’ National Institute of Justice From Winter 2007 TechBeat TECH b • e • a • t Dedicated to Reporting Developments in Technology for Law Enforcement, Corrections, and Forensic Sciences EXIF: A Format Is Worth A Thousand Words he National Center for Missing & Exploited Children if they are used only to open the file. If, however, these T revealed in a June 2005 study that 40 percent of arrest- programs are used to modify an image, they can destroy ed child pornography possessors had both sexually the Exif data. victimized children and were in possession of child pornog- The most important data may be the thumbnail image raphy. Due in part to the increasing prevalence of child exploitation and pornography, the digital photograph has linked to the photograph. Thumbnails are saved in their now become a fixture in gathering and examining forensic own hidden file (a thumbs.db file placed in folders con- evidence in such cases. taining images on the computer), and changes to an image may not always transfer to the corresponding Investigators who frequently handle child pornogra- thumbnail. If an original image is wiped from a disk using phy cases usually have (or know where to access) the a program such as Secure Clean™ or BCWipe®, the thumb- tools and the knowledge to obtain evidence associated nail may still be available. Officers have encountered situ- with contraband images. Nevertheless, law enforcement ations in which the victim’s or perpetrator’s face was officers who do not handle these cases on a regular basis blurred or concealed in the full image, but the thumbnail may be unaware of the important data that can be depicted an older version that revealed the obscured derived from digital images. -
Digital Negative (DNG) Specification
Digital Negative (DNG) Ë Specification Version 1.1.0.0 February 2005 ADOBE SYSTEMS INCORPORATED Corporate Headquarters 345 Park Avenue San Jose, CA 95110-2704 (408) 536-6000 http://www.adobe.com Copyright © 2004-2005 Adobe Systems Incorporated. All rights reserved. NOTICE: All information contained herein is the property of Adobe Systems Incorporated. No part of this publication (whether in hardcopy or electronic form) may be reproduced or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written consent of Adobe Systems Incorporated. Adobe, the Adobe logo, and Photoshop are either registered trademarks or trademarks of Adobe Systems Incorporated in the United States and/or other countries. All other trademarks are the property of their respective owners. This publication and the information herein is furnished AS IS, is subject to change without notice, and should not be construed as a commitment by Adobe Systems Incorporated. Adobe Systems Incorporated assumes no responsibility or liability for any errors or inaccuracies, makes no warranty of any kind (express, implied, or statutory) with respect to this publication, and expressly disclaims any and all warranties of merchantability, fitness for particular purposes, and noninfringement of third party rights. Table of Contents Preface . .vii About This Document . vii Audience . vii How This Document Is Organized . vii Where to Go for More Information . viii Chapter 1 Introduction . 9 The Pros and Cons of Raw Data. 9 A Standard Format . 9 The Advantages of DNG . 10 Chapter 2 DNG Format Overview . .11 File Extensions . 11 SubIFD Trees . 11 Byte Order . 11 Masked Pixels . -

Image Formats
Image Formats Ioannis Rekleitis Many different file formats • JPEG/JFIF • Exif • JPEG 2000 • BMP • GIF • WebP • PNG • HDR raster formats • TIFF • HEIF • PPM, PGM, PBM, • BAT and PNM • BPG CSCE 590: Introduction to Image Processing https://en.wikipedia.org/wiki/Image_file_formats 2 Many different file formats • JPEG/JFIF (Joint Photographic Experts Group) is a lossy compression method; JPEG- compressed images are usually stored in the JFIF (JPEG File Interchange Format) >ile format. The JPEG/JFIF >ilename extension is JPG or JPEG. Nearly every digital camera can save images in the JPEG/JFIF format, which supports eight-bit grayscale images and 24-bit color images (eight bits each for red, green, and blue). JPEG applies lossy compression to images, which can result in a signi>icant reduction of the >ile size. Applications can determine the degree of compression to apply, and the amount of compression affects the visual quality of the result. When not too great, the compression does not noticeably affect or detract from the image's quality, but JPEG iles suffer generational degradation when repeatedly edited and saved. (JPEG also provides lossless image storage, but the lossless version is not widely supported.) • JPEG 2000 is a compression standard enabling both lossless and lossy storage. The compression methods used are different from the ones in standard JFIF/JPEG; they improve quality and compression ratios, but also require more computational power to process. JPEG 2000 also adds features that are missing in JPEG. It is not nearly as common as JPEG, but it is used currently in professional movie editing and distribution (some digital cinemas, for example, use JPEG 2000 for individual movie frames). -
Potential Use of Image Description Metadata for Accessibility
DIAGRAM Center Working Paper – April 2011 Potential Use of Image Description Metadata for Accessibility This working paper outlines the current barriers and opportunities for providing image description within publishing tools, technologies, and production processes. Ongoing discussion with standards groups, Adobe and other tool developers is exploring the feasibility of extending support for alt text and longdesc within image formats and authoring tools. Background................................................................................................................................................................... 1 Image Metadata Specifications and Related Standards Organizations................................................. 3 Table 1 – Typical Camera Metadata................................................................................................................ 3 Table 2 – Metadata Formats Supported in Image Formats................................................................... 7 Opportunities for Image Description in Metadata Specifications.......................................................... 7 Table 3 – Metadata Working Group Description Field Cross References........................................ 8 Metadata Handling within Existing Tools ..................................................................................................... 10 Image Creation and Editing Tools................................................................................................................. 11 Image Management -

Briefing Paper: the Adobe Extensible Metadata Platform (XMP)
BRIEFING PAPER:THE ADOBEEXTENSIBLE METADATA PLATFORM (XMP) ALEX BALL kim11rep015ab10.pdf ACCESS LEVEL: 1 ISSUE DATE: 22 FEBRUARY 2007 APPROVED BY:MANSUR DARLINGTON DATE APPROVED: 15 MARCH 2007 BRIEFING PAPER:THE ADOBE EXTENSIBLE METADATA PLATFORM (XMP) 1 INTRODUCTION The Adobe eXtensible Metadata Platform (XMP) was introduced to Adobe products to solve the problem of embedding a wide variety of metadata into various different file formats using a common approach [Adobe 2001]. The approach chosen involves the use of the World Wide Web Consortium’s Resource Description Framework (RDF) in XML format as the vehicle for expressing metadata, coupled with some proprietary wrapper tags and custom schemata [Adobe 2005b]. This briefing paper looks at the nature of XMP, its possibilities and limitations. 2 THE RESOURCE DESCRIPTION FRAMEWORK This section provides a short introduction to RDF, in particular RDF/XML, as a means of expressing metadata [W3C 2004]. RDF is based on the principle of representing the properties of objects, and the relation- ships between objects, as simple triples of data: a subject (the resource being described), a predicate (a defined relationship or property) and an object (the value of the property, or the related resource). For example, a book may be described by the following triple: Subject: Book1 Predicate: dc:title Object: “The fall and rise of the yo-yo” The predicate dc:title is an abbreviation of http://purl.org/dc/elements/1.1/title , 〈 〉 which is the URI of its definition. This triple may be represented using an RDF diagram: dc:title The fall and rise Book1 of the yo-yo where oval containers represent resources (things), rectangular containers represent literals (strings, numbers, etc.) and arrows represent predicates. -

JPEG Renaming and Loss-Free Processing EXIF TRICKS
COVER STORY Image Processing with EXIF JPEG renaming and loss-free processing EXIF TRICKS You can rename and modify JPEG files without touching the graphics by manipulating settings in the file header. www.sxc.hu BY MARTIN STEIGERWALD he Exchange Image File (EXIF) data is included with image file formats tings such as the date and time of cre- format is a standard developed such as JPEG and TIFF, as well as with ation, the exposure time, the aperture Tby the Japan Electronic Industry audio formats such as RIFF. Depending setting, the exposure program, the size, Development Association (JEIDA) that on the model and make of your camera, the resolution, and the orientation of the lets digital cameras store meta-informa- the meta-information stored in the image. tion in the header of an image file. EXIF header of the image file can include set- Linux provides several tools for ma- nipulating EXIF data directly. Directly Table 1: EXIF Applications manipulating the metadata associated with an image file saves time, promotes Application EXIF Support Loss-free Rotation and Mirroring automation, and, in some cases, pre- Digikam 0.7.2, Photo management Load, display, but not save In the drop-down for the image, also automatically based on EXIF vents the data loss that would occur information with graphic manipulation. This article Eye of Gnome 2.8.2, Image Viewer Load, display, and save No describes some techniques for using Feh 1.3.4, Image viewer No Via File | Edit in Place. EXIF infor- EXIF metadata to rename and manipu- mation is lost late JPEG images. -

What Is EXIF Data and How Can You Use It Improve Your Photography?
What is EXIF data and how can you use it Improve your Photography? PUBLISHED - 27 JUN 2016 Improve your imaging by tapping into the wealth of information stored about your shots in the EXIF data. EXIF stands for 'EXchangeable Image File format', and it lists the details of all the settings used to make your image. No matter what digital camera system you're shooting with – DSLR, compact, even a mobile-phone camera – it records the EXIF data for each image, whether that's RAW (NEF), TIFF or JPEG. So what's recorded? Basically everything from the original image, including model of camera, lens type, exposure mode, shutter speed, lens aperture and focal length, metering mode, ISO, white balance, flash settings, subject distance, exposure bias (e.g. under/over), the date and time the picture was taken, and even the location if your camera has a geotagging facility. It won't, however, show up adjustments made to an image – it's all about the RAW data. The beauty of EXIF data is that it enables you to check out the settings that work in a particular situation, and the ones that don't, so you can learn from your mistakes and improve your imaging. Even better, you can also check out the EXIF data from images posted 1 of 2 on photo-sharing websites such as Flickr, so you can explore the settings that more experienced photographers have chosen for their image to achieve a particular look. You can access EXIF data in Nikon Capture NX-D (and Capture NX2), as well as Adobe's Photoshop, Bridge and Lightroom software.