Dynamic Impact Factors on Existing Long Span Truss Railroad Bridges
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
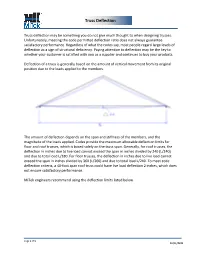
Truss Deflection
Truss Deflection Truss deflection may be something you do not give much thought to when designing trusses. Unfortunately, meeting the code permitted deflection ratio does not always guarantee satisfactory performance. Regardless of what the codes say, most people regard large levels of deflection as a sign of structural deficiency. Paying attention to deflection may be the key to whether your customer is satisfied with you as a supplier and continues to buy your products. Deflection of a truss is generally based on the amount of vertical movement from its original position due to the loads applied to the members. The amount of deflection depends on the span and stiffness of the members, and the magnitude of the loads applied. Codes provide the maximum allowable deflection limits for floor and roof trusses, which is based solely on the truss span. Generally, for roof trusses, the deflection in inches due to live load cannot exceed the span in inches divided by 240 (L/240) and due to total load L/180. For floor trusses, the deflection in inches due to live load cannot exceed the span in inches divided by 360 (L/360) and due to total load L/240. To meet code deflection criteria, a 40-foot span roof truss could have live load deflection 2 inches, which does not ensure satisfactory performance. MiTek engineers recommend using the deflection limits listed below. Page 1 of 5 10 /12 /20 20 Truss Deflection Roof Trusses should use the following settings: In MiTek 20/20 Engineering go to Setup – Job – Design Info – Deflection: In Structure with Truss Design go to File – Setup – Job Properties - Job Settings – Design – Building Code Settings: Please note the settings for cantilever and overhang are half that of the main span. -

Truss Terminology
TRUSS TERMINOLOGY BEARING WIDTH The width dimension of the member OVERHANG The extension of the top chord beyond the providing support for the truss (usually 3 1/2” or 5 1/2”). heel joint. Bearing must occur at a truss joint location. PANEL The chord segment between two adjacent joints. CANTILEVER That structural portion of a truss which extends PANEL POINT The point of intersection of a chord with the beyond the support. The cantilever dimension is measured web or webs. from the outside face of the support to the heel joint. Note that the cantilever is different from the overhang. PEAK Highest point on a truss where the sloped top chords meet. CAMBER An upward vertical displacement built into a truss bottom chord to compensate for defl ection due to dead load. PLATE Either horizontal 2x member at the top of a stud wall offering bearing for trusses or a shortened form of connector CHORDS The outer members of a truss that defi ne the plate, depending on usage of the word. envelope or shape. PLUMB CUT Top chord cut to provide for vertical (plumb) TOP CHORD An inclined or horizontal member that establishes installation of fascia. the upper edge of a truss. This member is subjected to compressive and bending stresses. SCARF CUT For pitched trusses only – the sloping cut of upper portion of the bottom chord at the heel joint. BOTTOM CHORD The horizontal (and inclined, ie. scissor trusses) member defi ning the lower edge of a truss, carrying SLOPE (PITCH) The units of horizontal run, in one unit of ceiling loads where applicable. -

Mitek Guidefor ROOF Trussinstallation
TIMBER ROOF TRUSSES MiTek GUIDE for ROOF TRUSS Installation The Timber Roof Trusses you are about to install have been manufactured to engineering standards. To ensure that the trusses perform, it is essential that they be handled, erected and braced correctly. 2019 - Issue 1 mitek.com.au TABLE OF CONTENTS Fixing & Bracing Guidelines For Timber Roof Trusses General .....................................................................................................................................................................................3 Design ......................................................................................................................................................................................3 Transport..................................................................................................................................................................................3 Job Storage ..............................................................................................................................................................................3 Roof Layout .............................................................................................................................................................................4 Erection and Fixing ...................................................................................................................................................................4 Girder and Dutch Hip Girder Trusses .......................................................................................................................................7 -

Rolling Roof Trusses,” Pp
Rolling 94 FINE HOMEBUILDING Roof Trusses Factory-made trusses save time and give you a roof engineered for strength and stability BY LARRY HAUN oof trusses offer many advantages. They are lightweight (generally made from kiln-dried 2x4s), so they Rare fairly easy to handle. Because trusses are engineered, they can span longer distances without having to rest on interior bearing walls, allowing for more flexibility in room size and layout. Finally, installing trusses on most houses is pretty simple. If you want to get a house weatherized quickly, roof trusses are the way to go. Ceiling joists and rafters are installed in one shot, and no tricky cuts or calculations are required. Lay out braces as well as plates Laying out the top plates for trusses is the same as for roof rafters. Whenever possible, I mark truss locations on the top plates before the framed walls are raised, which keeps me from having to do the layout from a ladder or scaffolding. For most roofs, the trusses are spaced 2 ft. on center (o.c.). I simply hook a IT’S EASY TO KEEP A STRAIGHT FASCIA Even if the walls aren’t perfectly straight, the trusses can be. To keep the eaves aligned and the fascias straight, you can take advantage of truss uniformity. Snap a chalk- line along an outside top plate (top photo). Align a mark on the truss with the chalkline when you set the truss (photos right). DECEMBER 2004/JANUARY 2005 95 UNLOADING AND SPREADING TRUSSES SET THE STAGE Erected to ease installation, a temporary catwalk is completed before the trusses arrive in bundles (photo below). -

Timber Bridges Design, Construction, Inspection, and Maintenance
Timber Bridges Design, Construction, Inspection, and Maintenance Michael A. Ritter, Structural Engineer United States Department of Agriculture Forest Service Ritter, Michael A. 1990. Timber Bridges: Design, Construction, Inspection, and Maintenance. Washington, DC: 944 p. ii ACKNOWLEDGMENTS The author acknowledges the following individuals, Agencies, and Associations for the substantial contributions they made to this publication: For contributions to Chapter 1, Fong Ou, Ph.D., Civil Engineer, USDA Forest Service, Engineering Staff, Washington Office. For contributions to Chapter 3, Jerry Winandy, Research Forest Products Technologist, USDA Forest Service, Forest Products Laboratory. For contributions to Chapter 8, Terry Wipf, P.E., Ph.D., Associate Professor of Structural Engineering, Iowa State University, Ames, Iowa. For administrative overview and support, Clyde Weller, Civil Engineer, USDA Forest Service, Engineering Staff, Washington Office. For consultation and assistance during preparation and review, USDA Forest Service Bridge Engineers, Steve Bunnell, Frank Muchmore, Sakee Poulakidas, Ron Schmidt, Merv Eriksson, and David Summy; Russ Moody and Alan Freas (retired) of the USDA Forest Service, Forest Products Laboratory; Dave Pollock of the National Forest Products Association; and Lorraine Krahn and James Wacker, former students at the University of Wisconsin at Madison. In addition, special thanks to Mary Jane Baggett and Jim Anderson for editorial consultation, JoAnn Benisch for graphics preparation and layout, and Stephen Schmieding and James Vargo for photographic support. iii iv CONTENTS CHAPTER 1 TIMBER AS A BRIDGE MATERIAL 1.1 Introduction .............................................................................. l- 1 1.2 Historical Development of Timber Bridges ............................. l-2 Prehistory Through the Middle Ages ....................................... l-3 Middle Ages Through the 18th Century ................................... l-5 19th Century ............................................................................ -

Roof Truss – Fact Book
Truss facts book An introduction to the history design and mechanics of prefabricated timber roof trusses. Table of contents Table of contents What is a truss?. .4 The evolution of trusses. 5 History.... .5 Today…. 6 The universal truss plate. 7 Engineered design. .7 Proven. 7 How it works. 7 Features. .7 Truss terms . 8 Truss numbering system. 10 Truss shapes. 11 Truss systems . .14 Gable end . 14 Hip. 15 Dutch hip. .16 Girder and saddle . 17 Special truss systems. 18 Cantilever. .19 Truss design. .20 Introduction. 20 Truss analysis . 20 Truss loading combination and load duration. .20 Load duration . 20 Design of truss members. .20 Webs. 20 Chords. .21 Modification factors used in design. 21 Standard and complex design. .21 Basic truss mechanics. 22 Introduction. 22 Tension. .22 Bending. 22 Truss action. .23 Deflection. .23 Design loads . 24 Live loads (from AS1170 Part 1) . 24 Top chord live loads. .24 Wind load. .25 Terrain categories . 26 Seismic loads . 26 Truss handling and erection. 27 Truss fact book | 3 What is a truss? What is a truss? A “truss” is formed when structural members are joined together in triangular configurations. The truss is one of the basic types of structural frames formed from structural members. A truss consists of a group of ties and struts designed and connected to form a structure that acts as a large span beam. The members usually form one or more triangles in a single plane and are arranged so the external loads are applied at the joints and therefore theoretically cause only axial tension or axial compression in the members. -

Cross Laminated Timber
WoodWorks Efficient Use of Wood Framing in Retail Buildings Archie Landreman, CSI Technical Director – National Accounts “The Wood Products Council” is a Registered Provider with The American Institute of Architects Continuing Education Systems (AIA/CES). Copyright Materials Credit(s) earned on completion of this program will be reported to AIA/CES for AIA mem bers. C er tifica tes o f C ompl e tion for b oth AIA members and non-AIA members are available upon request. This presentation is protected by US and International Copyright laws. Reproduction, This program is registered with AIA/CES for continuing professional dis tr ibu tion, disp lay an d use o f the presen ta tion education. As such, it does not include content that may be deemed without written permission of the speaker is or construed to be an approval or endorsement by the AIA of any prohibited. material of construction or any method or manner of handling, using, distributing, or dealing in any material or product. © The Wood Products Council 2011 Questions related to specific materials, methods, and services will be addressed at the conclusion of this presentation. Learning Objectives At the end of this program, participants will be able to: 1. KhihttlddtilblfitilKnow which structural wood products are available for use in retail buildings 2. Understand advantages of structural wood products used in retail buildings 3. Compare structural wood products 4. Refer to specific applications of structural wood products when used in retail buildingsg Why Are We Here? Who Are We? . Share Ideas . Audience Background? . Open Doors to Communication . Provoke Thought . -

Ilevel Trus Joist TJI 110, 210, 230, 360, & 560 Joists Specifier's Guide
FLOOR SOLUTIONS ROOF SOLUTIONS TRUS JOIST® ® ® TJI 110 TJI 210 ® ® TJI 230 TJI 360 TJI® 560 JOISTS Featuring Silent Floor® Joists for Residential Applications Uniform and Predictable Signifi cantly Reduces Callbacks Lightweight for Fast Available in Long Lengths Installation Limited Product Warranty Resource Effi cient Resists Bowing, Twisting, and Shrinking #TJ-4000 SPECIFIER’S GUIDE www.iLevel.com 1.888.iLevel8 (1.888.453.8358) ALL IN ONE™ WELCOME TO iLEVEL iLevel is an exciting new brand and business within Weyerhaeuser. iLevel brings the most innovative and trusted products for residential construction together under one roof. Within iLevel, you’ll still fi nd all the reliable, brand-name building products that you’ve been using—Trus Joist® engineered wood products and design software, Structurwood® engineered panels, Performance Tested™ lumber, and more. But with iLevel, you’ll work with only one service-oriented supplier to get all of these products and the support you need to build smarter. iLevel. A family of brand-name building products… a source for innovative ideas and solutions… a supplier that’s simpler to do business with. TJI® Joists Revolutionized the Way You Build Floors Trus Joist® developed wooden I-joists nearly 40 years ago, and since then we’ve continually improved their quality and made them easier to work with. Engineered to provide strength and consistency, iLevel™ Trus Joist® Silent Floor® joists (TJI® joists) are a key part of our FrameWorks® Floor system. TABLE OF CONTENTS Here’s Why so Many Specifi ers and Builders Choose Silent Floor® Joists: Design Properties 3 Material Weights 3 Design fl exibility—longer lengths mean versatile design options. -

Chambers Covered Railroad Bridge Salvage and Rehabilitation
Chambers Covered Railroad Bridge Salvage and Rehabilitation Gregory W. Ausland, PE Greg has more than 27 years of Senior Project Manager civil/structural design and project management experience, OBEC Consulting Engrs and since 1989 has had the Eugene, Oregon, USA distinctive experience of being [email protected] the designer and/or project manager on rehabilitation and repair projects for 32 of Oregon's 50 covered bridges. Tony LaMorticella,PE, SE Inspired by the graceful bridges Sr. Project Engineer on the Oregon Coast, Tony became an engineer after OBEC Consulting Engrs building custom furniture for 15 Eugene, Oregon, USA years. He's been engaged in [email protected] structural design for 20 years, and has been lead design engineer on 18 covered bridge rehabilitation projects. Summary The Chambers Covered Bridge was built in 1925 and is the last remaining covered railroad bridge in Oregon, possibly the only one west of the Mississippi. Therefore, its rehabilitation was critical to historic preservation efforts of the country's remaining covered rail bridges. Before rehabilitation, the 27.4 m (90-foot) long timber structure was in danger of collapse after decades of neglect. In 2010 a windstorm threatened to destroy the bridge. This unique, single-span, four-leaf Howe truss structure was dismantled and rebuilt using almost all the original iron and hardware, and 25 percent of the original timber. The bridge was reconstructed on dry ground and launched onto the existing concrete piers. The rehabilitated Chambers Covered Bridge now serves as a landmark pedestrian and bicycle crossing that provides safe access across the Coast Fork of the Willamette River. -

Details of Railroad Truss-Bridges Is Approved by Me As Meeting This Part of the Requirements for the Degree of Bachelor of Science in Civil Engineering
UNIVERSITY OF ILLINOIS LIBRARY Class Book Volume C \ D\0 T^a VW10-20M * . * T- *• . T Mb ajfc- f- * f. - - 4 * / * -f "f t* 7*' T r* # * * fife M + * r # * + £ 3#» 4* + 4- 4 t * * * # * * * • * * * # I * * * * i f * * f + + + 4- * + * f m IVWJ * 4 lap 3 ? - * * it ^ ; # * 4r ^ 4- r * > I # + # I + -4- * * *- • ^* ^ ^ • ^ I 1 4* Ml m I ; #- 1 * f 1 4' Mm 4 t- . W >^ I I , w IPA f 4 ^r- f f | ^ 4^ 4 4- # i I * I f # + H i 1 1 * 4 4V l ^ ^ ^ ^ V. ET T ^ DETAILS OF RAILROAD TRUSS-BRIDOES BY Paul Frederick Jervis THESIS FOR THE DEGREE OF BACHELOR OF SCIENCE IN CIVIL ENGINEERING COLLEGE OF ENGINEERING UNIVERSITY OF ILLINOIS PRESENTED JUNE, 1910 va\o UNIVERSITY OF ILLINOIS COLLEGE OP ENGINEERING.. June i, 1910 This, is to certify that the thesis of PAUL FREDE- RICK JERVIS entitled Details of Railroad Truss-Bridges is approved by me as meeting this part of the requirements for the degree of Bachelor of Science in Civil Engineering, Instructor in ChargeT" Approved :. Professor of Civil Engineering, I69t39 UIUC 1. CONTENTS. Page. Introduction ...... 2 Details of Through Pin-connected Bridges End Post and Upper chord . , 4. Lower Chord .7 Intermediate posts 8 Hip-Verticals 10 Floorbeams 11 Stringers 15 Floors 17 Top Laterals 19 Top Lateral struts and Sway Bracing . 21 Portal Bracing 22 Pedestals 25 Rollers and plates .26 Details of DecK Pin-Connected Bridges Wind Bracing 29 Floorbeams and Stringers .30 Hip-Verticals 30 Connection of Top Chords 32 Details of Through Riveted Trusses 33 Details of Deck Riveted Trusses 3^ Conclusion 35 Digitized by the Internet Archive in 2013 http://archive.org/details/detailsofrailroaOOjerv . -
Builder's Guide to Trusses
Table of Contents Roof Construction Techniques: Pro’s and Con’s . 2 Trusses: Special Benefits for Architects and Engineers . 4 Special Benefits for Contractors and Builders . 5 Special Benefits for the Owner. 5 How Does A Truss Work? . 6 Typical Framing Systems. 8 Gable Framing Variations . 11 Hip Set Framing Variations . 13 Additional Truss Framing Options Valley Sets . 15 Piggyback Trusses . 17 Typical Truss Configurations . 18 Typical Truss Shapes. 20 Typical Bearing / Heel Conditions Exterior Bearing Conditions. 21 Crushing at the Heel . 22 Trusses Sitting on Concrete Walls . 22 Top Chord Bearing. 23 Mid-Height Bearing . 23 Leg-Thru to the Bearing. 23 Tail Bearing Tray. 24 Interior Bearing Conditions . 24 Typical Heel Conditions. 25 Optional End Cosmetics Level Return. 25 Nailer . 25 Parapet. 26 Mansard . 26 Cantilever. 26 Stub . 26 Bracing Examples . 27 Erection of Trusses . 29 Temporary Bracing . 30 Checklist for Truss Bracing Design Estimates . 32 Floor Systems . 33 Typical Bearing / Heel Conditions for Floor Trusses Top Chord, Bottom Chord, and Mid-Height Bearing. 34 Interior Bearing Conditions . 35 Ribbon Boards, Strongbacks and Fire Cut Ends . 36 Steel Trusses . 37 Ask Charlie V. 38 Charlie’s Advice on Situations to Watch Out for in the Field. 41 Glossary of Terms. 42 Appendix - References. 48 1 Builders, Architects and Home Owners today have many choices about what to use in roof and floor systems Traditional Stick Framing – Carpenters take 2x6, Truss Systems – in two primary forms: 2x8, 2x10 and 2x12 sticks of lumber to the job • Metal Plate Connected Wood Trusses – site. They hand cut and fit this lumber together Engineered trusses are designed and into a roof or floor system. -

BNSF Railroad Truss Bridge—Oklahoma City
BNSF TRUSS BIOGRAPHY ACCELERATED Sue Tryon, PE, is a Senior This is the first truss bridge Engineering Manager and erected by the Oklahoma BRIDGE leader of the Transportation Department of Transportation CONSTRUCTION Structures Group for Benham (ODOT) since the 1960’s. Design, LLC in Tulsa, OK. She Designing a truss bridge for OVER I-235 the BNSF Railroad and has 31 years of design experience in a broad range of bidding/ constructing what is complex structures in the now a very unusual structure transportation industry. for ODOT presented several challenges that were overcome Dennis Noernberg is the Bridge through the partnerships that Detailing Manager for W&W | have developed over a number AFCO Steel in Little Rock, AR. of years. He has 25 years of experience in the planning, detailing, and The use of Accelerated Bridge fabrication of complex highway Construction techniques and railroad bridges. (ABC) minimized disruption to the BNSF rail traffic, SUMMARY averaging 49 trains per day, SUE TRYON, PE and 115,000 vehicles per day The new Burlington Northern Santa Fe (BNSF) truss bridge using the interstate. The over I-235 is located ½ mile contract documents were south of the junction of I-235 crafted carefully to ensure the with I-44 in Oklahoma City. I- contractors were fully aware 235 carries 115,000 vehicles the highway traffic would not per day, connecting the be allowed to be reduced from northern suburbs to the Central four lanes to two lanes. The Business District and the trusses could be launched or Capitol Complex. The truss moved into place, but could bridge is composed of two not be stick-built in the final 275-foot spans with a total location.