The Game 1992 Maize Craze
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
PLC/SCADA Systems in Automation Control Design for Individual Quick Freezing Process in Cooling Tunnels
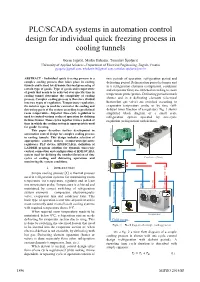
PLC/SCADA systems in automation control design for individual quick freezing process in cooling tunnels Goran Jagetić, Marko Habazin, Tomislav Špoljarić University of Applied Sciences - Department of Electrical Engineering, Zagreb, Croatia [email protected], [email protected], [email protected] ABSTRACT - Individual quick freezing process is a two periods of operation: refrigeration period and complex cooling process that takes place in cooling defrosting period. Refrigeration period is longer and tunnels and is used for dynamic thermal processing of in it refrigeration elements (compressor, condenser certain type of goods. Type of goods and temperature and evaporator fans) are switched according to room of goods that needs to be achieved over specific time in temperature probe/probes. Defrosting period is much cooling tunnel determine the complexity of cooling process. Complex cooling process is therefore divided shorter and in it defrosting elements (electrical into two types of regulation. Temperature regulation, heaters/hot gas valve) are switched according to the inferior type, is used for control of the cooling and evaporator temperature probe or by time (off- defrosting parts of the system according to predefined delayed timer function of a regulator). Fig. 1 shows room temperature. Superior time-cycle regulation is simplified block diagram of a small scale used to control various cycles of operation by defining refrigeration system operated by one-cycle its time frames. These cycles together form a period of regulation (refrigeration with defrost). time in which the cooling system is appropriately used for goods' freezing. This paper describes further development in automation control design for complex cooling process in cooling tunnels. -
Making It LOUD
Making it LOUD 2011 Annual Report WWW.USFIRST.ORG1 For over 20 years, FIRST® Founder Dean Kamen and everyone associated with FIRST have been on a mission to spread President Barack Obama, along with White House Technology Officer Aneesh Chopra, continued to feature FIRST teams as perfect examples of the president’s national White the word about the many educational, societal, economical, and House Science Fair initiative promoting STEM (science, technology, engineering, and Dean Kamen will.i.am planetary benefits of getting youth and adults alike involved in theFIRST math) education and celebrating science and math achievement in American schools. Morgan Freeman experience. Despite not having access to the millions of marketing Soledad O’Brien dollars required to make FIRST a household “brand,” the program has continued to grow each year at a blistering pace. …aND loudER Books, magazines, newspapers, cable TV, and the Web helped us create noise, too, with ongoing national coverage by Bloomberg, CNN, Popular Mechanics, In 2011, however, thanks to the fervent interest of major figures Popular Science, Wired, ESPN Magazine, WallStreetJournal.com, and more. Author Neal Bascomb brought the FIRST experience to life in his inspiring in government, the media, and mainstream entertainment, the book, The New Cool.Time Warner Cable incorporated “volume” of voices promoting FIRST... FIRST into its national “Connect A Million Minds™” initiative, featuring our FRC program in its TV show “It Ain’t Rocket Science.” The clamor of FIRST recognition continues to grow ...GOT TuRNED UP loud...VERY loud! louder every day. The continuing mainstream exposure is helping propel us toward our goal of making FIRST known and recognized around the globe. -

Team Mercury 1089
TEAM MERCURY 1089 HIGHTSTOWN HIGH SCHOOL 2008-2009 Business Plan Table of Contents I. Executive Summary .................................................................................................................. 2 II. About FIRST ............................................................................................................................ 4 III. About the FIRST Robotics Competition .............................................................................. 5 IV. About Team Mercury............................................................................................................. 6 V. Team Purpose ........................................................................................................................... 7 VI. Team History .......................................................................................................................... 8 VII. Team Goals .......................................................................................................................... 10 Member Goals ........................................................................................................................... 10 Increasing Awareness of FIRST ............................................................................................... 11 Create partnerships with sponsors ............................................................................................ 12 Overall Organizational Goals .................................................................................................. -

Team Handbook 2017-18
Team Handbook 2017 -18 Welcome to FIRST Robotics Team 2930, the Sonic Squirrels, from Glacier Peak High School in Snohomish, Washington. Team 2930’s sponsors include Microsoft, Boeing, Leidos, FIRST WA, Philips Healthcare, the Office of the Superintendent of Public Instruction (OSPI), Glacier Peak High School ASB, and the Snohomish Education Foundation, Garlic Jim’s, Snap Dog Printing. TEAM MISSION STATEMENT FIRST Robotics Team 2930 strives to inspire members to become leaders in the fields of science, technology, engineering, mathematics and business, in an enthusiastic and encouraging environment. The team actively reaches out to the community, striving to inspire all youth to develop a passion for STEM, and inspiring people of all ages to become involved in FIRST. As active members of our community, we strive to positively impact society through service to others. TEAM 2930 GOALS Fully understand and exemplify the concepts of Gracious Professionalism, Coopertition, and other FIRST principles Foster a zeal for robotics and STEM related activities Develop teamwork skills and strive to work together as a seamless unit Build confidence in communications and leadership by engaging with the STEM community and the world of FIRST Robotics Actively encourage and support the growth of the FIRST programs TEAM HISTORY FRC Team 2930 was founded in 2008 by Kevin Winter, a teacher at Snohomish High School. Our team followed him to the new Glacier Peak High School, and we competed for the first time in the 2009 season, playing the game ‘Lunacy’. Jin Hayashi, another teacher at Glacier Peak, joined in 2010 and became our main faculty advisor for many years to come, replacing Kevin Winter before the 2011 season. -

Stakeholders in Student Success
Education…is a branch of that general work of enabling a great country to use its energies to the best advantage and to lift itself from generation to generation through the stages of unbroken progress. Woodrow Wilson, May 19, 1906, Cleveland, Ohio STAKEHOLDERS IN STUDENT SUCCESS: PUBLIC-PRIVATE PARTNERSHIP S Science, Technology, America, and the Global Economy Woodrow Wilson International Center for Scholars S TRENGTHENING K-12 E DUCATION One Woodrow Wilson Plaza 1300 Pennsylvania Avenue NW Washington, DC 20004-3027 A Report by Jacqueline Nader WWW.WILSONCENTER.ORG/STAGE Edited by Kent Hughes 16047WWICS_AGSPlacedCover-R2.indd 1 12/29/08 9:32:24 AM STAKEHOLDERS IN STUDENT SUCCESS: PUBLIC-PRIVATE PARTNERSHIPS STRENGTHENING K-12 EDUCATION A Report by Jacqueline Nader Edited by Kent Hughes 16047_Text--R1.indd i 12/24/08 3:47:15 AM Available from : Science, Technology, America, and the Global Economy Woodrow Wilson International Center for Scholars One Woodrow Wilson Plaza 1300 Pennsylvania Avenue NW Washington, DC 20004-3027 www.wilsoncenter.org/stage ISBN 1-933549-47-5 December 2008 Cover Photo: © JLP/Jose L. Pelaez/Corbiz 16047_Text--R2.indd ii 12/30/08 10:42:48 PM The Woodrow Wilson International Center for Scholars, established by Congress in 1968 and headquartered in Washington, D.C., is a living national memorial to President Wilson. The Center’s mission is to commemorate the ideals and concerns of Woodrow Wilson by providing a link between the worlds of ideas and policy, while fostering research, study, discussion, and collaboration among a broad spectrum of individuals concerned with policy and scholarship in national and international aff airs. -

2016 Business Plan
CougarTech FRC Team 2228 Business Plan Table of contents Executive Summary……………………………………………………………….. 4-5 History…………………………………………………………………………………….6-7 Team Organization………………………………………………………………….8-9 Sponsors.…………………………………………………………………………….10-11 Levels of Sponsorship……………………………………………………………….12 The Benefits of FIRST…………………………………………………………..14-16 Marketing…………………………………………………………………………………14 Technical…………………………………………………………………………………..15 Team Experience………………………………………………………………………16 Scholarships……………………………………………………………………………..16 Community Outreach……………………………………………………………….17 SWOT Analysis………………………………………………………………………….18 Growth……………………………………………………………………………………..19 Future Plans……………………………………………………………………………..19 2016 Season: Strong Hold…….………………………………………………….20 Our Robot (Kappa)……………………………………………………………………21 Contact Us………………………………………………………………………………..21 3 Executive summary Mission Statement FIRST Team 2228, CougarTech strives to maintain a self-sustaining team, motivating young people to be leaders through challenging and exciting programs building science, math, engineering, and technology skills. These skills are acquired in build season and are refined during the workshops Team 2228 offers off-season. As a teaching team, we inspire self-confidence, communication, and leadership. These interpersonal skills result in stronger partnerships among students, better strategic decisions, and help team members develop creative solutions. Team Formation and Current Team Team 2228 was formed in 2006 with support from Honeoye Falls-Lima Central School after students -

Notre Dame Robotics FIRST Team 1967 Business Plan 2015
Notre Dame Robotics FIRST Team 1967 Business Plan 2015 Team 1967 Business Plan 1 Table of Contents ♠ Executive Summary ……………………………………………………………………………………………… 3 ♣ Introduction ………………………………………………………………………………… . 3 … ……… ♣ Mission Statement .. ………………………………………………………………………… ……… 3 ♣ Team Goals . ……………………………………………………………… ………………… ……… . 3 … ♠ About Us ……………………………………………………………………………………………………… 4 ……… ♣ FIRST and FRC . …………………………………………………………………………… …………… 4 ♣ Notre Dame High School .. .. 4 ……………… ………………………………………… …………… ♣ The Team . ………………………………………………………………………… ……………… . 5 …… ♣ Team History . ……………………………………………………………… ………………… …… . 5 … ♠ SWOT Analysis . ……………………………………………………………… ……………………………… . 8 …… ♣ Strengths . ……………………………………………………………… …………………… ... 8 ………… ♣ Weaknesses . ……………………………………………………………… ………………… . 8 ………… ♣ Opportunities . ……………………………………………………………… ……………… . 8 ………… ♣ Threats . ……………………………………………………………… ……………………… . 8 …………… ♠ Outreach .. …………………………………………………………………………………………… . 9 …………… … ♣ Impact on School .. …… ………………………………………… ……………………………… … 9 Team 1967 Business Plan 2 ♣ Impact on Community. .. ………………………………………… …………………………… … 10 ♣ FIRST Outreach ……………………………………………………………………………………… .. 11 ♠ Team Structure . …………………………………………………………………………… ………………… 12 …… ♣ Team Leadership . ………………………………………………………………………………… . 12 … ♣ Student Leaders . ……………………………………………………………………………………… 12 ♣ Committees ………………………………………………………………………………… . 13 …… …… ♠ Financial Plan . ………………………………………………………………………………… ………………… .. 15 ♣ Budget . …………………………………………………………………………………… … . 15 …… ……… ♥ Estimated Revenue . -
User Manual for PLC Programming With
User Manual for PLC Programming with CoDeSys 2.3 Copyright ã 1994, 1997, 1999, 2001,2002, 2003 by 3S - Smart Software Solutions GmbH All rights reserved. We have gone to great lengths to ensure this documentation is correct and complete. However, since it is not possible to produce an absolutely error-free text, please feel free to send us your hints and suggestions for improving it. Trademark Intel is a registered trademark and 80286, 80386, 80486, Pentium are trademarks of Intel Corporation. Microsoft, MS and MS-DOS are registered trademarks, Windows is a trademark of Microsoft Corporation. Publisher 3S - Smart Software Solutions GmbH Fischerstraße 19 D-87435 Kempten Tel. +49 831 5 40 31 - 0 Fax +49 831 5 40 31 – 50 Last update 20.08.2003 Version 2.0 Content 1 A Brief Introduction to CoDeSys 1-1 1.1 What is CoDeSys .................................................................................................1-1 1.2 Overview of CoDeSys Functions... ......................................................................1-1 1.3 Overview on the user documentation for CoDeSys.............................................1-3 2 What is What in CoDeSys 2-1 2.1 Project Components.............................................................................................2-1 2.2 Languages... .........................................................................................................2-8 2.2.1 Instruction List (IL)... .............................................................................................2-8 2.2.2 Structured -

Semantic Analysis of Ladder Logic
Semantic Analysis of Ladder Logic A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science in the Graduate School of The Ohio State University By Soumyashree Gad, M.S. Graduate Program in Computer Science and Engineering The Ohio State University 2017 Master's Examination Committee: Dr. Srinivasan Parthasarathy, Advisor Dr. P. Sadayappan c Copyright by Soumyashree Gad 2017 Abstract Purpose: A careful examination of Ladder Logic program reveals it's hierarchical nature and components, which makes it interpret able. Perhaps, using data mining techniques to interpret the top level and sub-level components can be really useful. This seems like a classification problem. The application of machine learning algo- rithms on the features extracted from ladder logic can give insights of the whole ladder logic code. The components and their interactions are intuitive which certainly add to the probability of getting better results. The learning in the PLC programming can be alleviated by converting the existing PLC code to commonly used formats such as JSON, XML etc. The goal is to consume ladder logic sample, break it down into minor components, identify the components and interactions between them and later write them to JSON. As Ladder logic is the most commonly used programming language for PLCs we decided to start the experiment with Ladder logic program sam- ples. Feature engineering combined with machine learning techniques should provide accurate results for the Ladder Logic data. Methods: The data set contains 6623 records for top level classification with 1421 ALARM, 150 STEP SEQUENCE, 96 SOLENOID samples and 5304 UNCLASSIFIED and 84472 records for sub-level classification which contains sub-level components of the all the ALARM and STEP SEQUENCE samples from the top level data set. -

FMS Whitepaper
FMS Whitepaper FMS Whitepaper Overview The Field Management System (FMS) is the electronics core of a FIRST Robotics Competition (FRC) playing field. It encompasses all the controls for the field electronics, team robots, and is used to manage the event by creating match schedules, managing all field hardware during a match (timers, team lights, estops, etc.), scoring the matches in real-time, posting information to the Audience screen, and uploading results data to the Internet. FMS is based on Ethernet architecture. Components such as the Driver Station, or the touchscreens used by the referees, integrate with FMS through direct wired Ethernet interfaces. Devices like the ball counters used in Breakaway and Rebound Rumble, or the Estops and Stack Lights mounted in each Player Station, interface through Ethernet-based Input/Output (I/O) modules that are donated to FIRST by Rockwell Automation. The lights used to illuminate the tower bases in Logo Motion, the bridges in Rebound Rumble, and the high goals in Aerial Assist are controlled via Ethernet-enabled power supplies donated to FIRST by Philips Color Kinetics. The weight sensors used in Ultimate Accent were read by a National Instruments cRIO-FRC II and interfaced over the Ethernet network to a Rockwell Automation PLC module, to give some examples. This white paper focuses on the electronics infrastructure needed to control the robots on the playing field. Specific details on the FMS software used during each season can be found in the Field Management System User Guide, publicly available on this site. Frequently Asked Questions about the Field Management System and recommended best practices when operating on the competition field appear at the end of this document. -
FIRST Robotics at IUPUI
FIRST Robotics at IUPUI Peter O. Orono New Student Academic Advising Center Purdue School of Engineering and Technology Indiana University-Purdue University Indianapolis Outline Introduction Philosophy Competition Teams Sponsors Kick-off at IUPUI Questions New Student Academic Advising Center Seminar February 11, 2010 2 of 14 Introduction What is FIRST Robotics? For Inspiration and Recognition of Science and Technology (FIRST) For developing ways to inspire students in engineering and technology fields Competitions Grades K-3 (Junior FIRST LEGO League) Grades 4-8 (FIRST LEGO League) Grades 9-12 (FIRST Robotics Competition ) Grades 9-12 (FIRST Tech Challenge ) Founders (1989): Flowers and Kamen New Student Academic Advising Center Seminar May 13, 2009 3 of 14 Philosophy Definition of guiding principles A FIRST seeks to promote a philosophy of teamwork and collaboration among engineers and encourages competing teams to remain friendly, helping each other out when necessary. The terms frequently applied to this ethos are "gracious professionalism," and "Coopertition," the terms coined by Woodie Flowers which support respect towards one's competitors and integrity in one's actions. The Vision: http://www.usfirst.org/VideoPlayer.aspx?video=1st_VIS ION.flv February 11, 2010 New Student Academic Advising Center Seminar 4 of 14 Competitions Growth FIRST Robotics Competition (FRC) The first program developed through FIRST was the FIRST Robotics Competition (FRC), which is designed to inspire high school students to become engineers by giving them real world experience working with professional engineers to develop a robot. The inaugural FRC was held in 1992 with 28 teams in the Manchester Memorial High School gymnasium As of 2010, over 1,800 high school teams totaling over 45,000 students from Brazil, Canada, Israel, Mexico, the Netherlands, the United States, the United Kingdom, and more compete in the annual competition. -
Team Handbook 2019-2020
Team Handbook 2019-2020 Welcome to FIRST Robotics Team 2930, the Sonic Squirrels, from Snohomish School District, Washington. Team 2930’s sponsors include Microsoft, Boeing, Leidos, FIRST WA, Philips Healthcare, the Office of the Superintendent of Public Instruction (OSPI), Glacier Peak High School ASB, Electro Impact, Aerojet Rocketdyne, Solid Works, F5 Networks, the Snohomish Education Foundation. TEAM MISSION STATEMENT Have Fun! Build Fun! Be Fun! Have Fun: have fun learning, teaching, experiencing. Build Fun: build up other teams and a good working environment in which we build a robot as well as many other aspects of our team. Be Fun: be fun and spirited people. TEAM 2930 GOALS -Fully understand and exemplify the concepts of Gracious Professionalism™, Coopertition™, and other FIRST principles. Gracious Professionalism is a way of doing things that encourages high-quality work, emphasizes the value of others, and respects individuals and the community. Coopertition is defined by displaying unqualified kindness and respect in the face of fierce competition. -Foster a zeal to give back to the community. -Develop engineering, business, problem solving, communications, and teamwork skills working together to achieve our team and FIRST missions. -Build confidence in communications and leadership by engaging with the community through the world of FIRST Robotics and STEM. -Actively encourage and support the growth of all FIRST programs. TEAM HISTORY FRC Team 2930 was founded in 2008 by Kevin Winter, a teacher at Snohomish High School. Our team followed him to the new Glacier Peak High School, and we competed for the first time in the 2009 season, playing the game ‘Lunacy’.