Article 16 Juno Telecommunications Revision A: Addition of Operations from Early Cruise Through First Months of Operation, Five Science Orbits (Sept
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The 4 Major Asteroids and Chiron Report For
The 4 Major Asteroids and Chiron Report for Brad Roberts 10 January 1964 6:33 AM Winnipeg, Manitoba,Canada Calculated for: Standard time, Time Zone 6 hours West Latitude: 49 N 53 Longitude: 97 W 09 Positions of Planets at Birth: Sun 19 Cap 18 Asc. 20 Sag 35 Moon 1 Sag 21 MC 21 Lib 49 Mercury 6 Cap 24 2nd cusp 0 Aqu 56 Venus 21 Aqu 54 3rd cusp 17 Pis 07 Mars 27 Cap 52 5th cusp 15 Tau 45 Jupiter 11 Ari 42 6th cusp 4 Gem 07 Saturn 21 Aqu 25 Ceres 9 Sag 44 Uranus 9 Vir 47 Pallas 20 Sco 12 Neptune 17 Sco 47 Juno 23 Sco 36 Pluto 14 Vir 47 Vesta 4 Cap 54 True Node11 Can 47 Chiron 11 Pis 23 Aspects and orbs: Conjunction : 7 Deg 00 Min Trine : 5 Deg 00 Min Opposition : 6 Deg 00 Min Sextile : 3 Deg 00 Min Square : 4 Deg 00 Min Interpretations by astrologer Dave Campbell Report and Text Copyright By Cosmic Patterns Software, Inc. The contents of this report are protected by Copyright law. By purchasing this report you agree to comply with this Copyright. Libra Moon, Inc www.libramoonastrology.com www.zodiac-reports.com Chapter 1: Ceres Ceres in Sagittarius: You nurture people with your generosity cheerfulness and encouragement. Giving them the optimism and openness they need. You aim to inspire them and make them feel like they are it. Your honest disposition and behavior is also a gift for them to know your devotion to them. All of these things are exactly what you need in order to feel cared for. -

Occultation Newsletter Volume 8, Number 4
Volume 12, Number 1 January 2005 $5.00 North Am./$6.25 Other International Occultation Timing Association, Inc. (IOTA) In this Issue Article Page The Largest Members Of Our Solar System – 2005 . 4 Resources Page What to Send to Whom . 3 Membership and Subscription Information . 3 IOTA Publications. 3 The Offices and Officers of IOTA . .11 IOTA European Section (IOTA/ES) . .11 IOTA on the World Wide Web. Back Cover ON THE COVER: Steve Preston posted a prediction for the occultation of a 10.8-magnitude star in Orion, about 3° from Betelgeuse, by the asteroid (238) Hypatia, which had an expected diameter of 148 km. The predicted path passed over the San Francisco Bay area, and that turned out to be quite accurate, with only a small shift towards the north, enough to leave Richard Nolthenius, observing visually from the coast northwest of Santa Cruz, to have a miss. But farther north, three other observers video recorded the occultation from their homes, and they were fortuitously located to define three well- spaced chords across the asteroid to accurately measure its shape and location relative to the star, as shown in the figure. The dashed lines show the axes of the fitted ellipse, produced by Dave Herald’s WinOccult program. This demonstrates the good results that can be obtained by a few dedicated observers with a relatively faint star; a bright star and/or many observers are not always necessary to obtain solid useful observations. – David Dunham Publication Date for this issue: July 2005 Please note: The date shown on the cover is for subscription purposes only and does not reflect the actual publication date. -

Navigation Challenges During Exomars Trace Gas Orbiter Aerobraking Campaign
NON-PEER REVIEW Please select category below: Normal Paper Student Paper Young Engineer Paper Navigation Challenges during ExoMars Trace Gas Orbiter Aerobraking Campaign Gabriele Bellei 1, Francesco Castellini 2, Frank Budnik 3 and Robert Guilanyà Jané 4 1 DEIMOS Space located at ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany 2 Telespazio VEGA located at ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany 3 ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany 4 GMV INSYEN located at ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany Abstract The ExoMars Trace Gas Orbiter satellite spent one year in aerobraking operations at Mars, lowering its orbit period from one sol to about two hours. This delicate phase challenged the operations team and in particular the navigation system due to the highly unpredictable Mars atmosphere, which imposed almost continuous monitoring, navigation and re-planning activities. An aerobraking navigation concept was, for the first time at ESA, designed, implemented and validated on-ground and in-flight, based on radiometric tracking data and complemented by information extracted from spacecraft telemetry. The aerobraking operations were successfully completed, on time and without major difficulties, thanks to the simplicity and robustness of the selected approach. This paper describes the navigation concept, presents a recollection of the main in-flight results and gives a retrospective of the main lessons learnt during this activity. Keywords: ExoMars, Trace Gas Orbiter, aerobraking, navigation, orbit determination, Mars atmosphere, accelerometer Introduction The ExoMars program is a cooperation between the European Space Agency (ESA) and Roscosmos for the robotic exploration of the red planet. -
ESTRACK Facilities Manual (EFM) Issue 1 Revision 1 - 19/09/2008 S DOPS-ESTR-OPS-MAN-1001-OPS-ONN 2Page Ii of Ii
fDOCUMENT document title/ titre du document ESA TRACKING STATIONS (ESTRACK) FACILITIES MANUAL (EFM) prepared by/préparé par Peter Müller reference/réference DOPS-ESTR-OPS-MAN-1001-OPS-ONN issue/édition 1 revision/révision 1 date of issue/date d’édition 19/09/2008 status/état Approved/Applicable Document type/type de document SSM Distribution/distribution see next page a ESOC DOPS-ESTR-OPS-MAN-1001- OPS-ONN EFM Issue 1 Rev 1 European Space Operations Centre - Robert-Bosch-Strasse 5, 64293 Darmstadt - Germany Final 2008-09-19.doc Tel. (49) 615190-0 - Fax (49) 615190 495 www.esa.int ESTRACK Facilities Manual (EFM) issue 1 revision 1 - 19/09/2008 s DOPS-ESTR-OPS-MAN-1001-OPS-ONN 2page ii of ii Distribution/distribution D/EOP D/EUI D/HME D/LAU D/SCI EOP-B EUI-A HME-A LAU-P SCI-A EOP-C EUI-AC HME-AA LAU-PA SCI-AI EOP-E EUI-AH HME-AT LAU-PV SCI-AM EOP-S EUI-C HME-AM LAU-PQ SCI-AP EOP-SC EUI-N HME-AP LAU-PT SCI-AT EOP-SE EUI-NA HME-AS LAU-E SCI-C EOP-SM EUI-NC HME-G LAU-EK SCI-CA EOP-SF EUI-NE HME-GA LAU-ER SCI-CC EOP-SA EUI-NG HME-GP LAU-EY SCI-CI EOP-P EUI-P HME-GO LAU-S SCI-CM EOP-PM EUI-S HME-GS LAU-SF SCI-CS EOP-PI EUI-SI HME-H LAU-SN SCI-M EOP-PE EUI-T HME-HS LAU-SP SCI-MM EOP-PA EUI-TA HME-HF LAU-CO SCI-MR EOP-PC EUI-TC HME-HT SCI-S EOP-PG EUI-TL HME-HP SCI-SA EOP-PL EUI-TM HME-HM SCI-SM EOP-PR EUI-TP HME-M SCI-SD EOP-PS EUI-TS HME-MA SCI-SO EOP-PT EUI-TT HME-MP SCI-P EOP-PW EUI-W HME-ME SCI-PB EOP-PY HME-MC SCI-PD EOP-G HME-MF SCI-PE EOP-GC HME-MS SCI-PJ EOP-GM HME-MH SCI-PL EOP-GS HME-E SCI-PN EOP-GF HME-I SCI-PP EOP-GU HME-CO SCI-PR -

Cleaning the Dishes 29 November 2019
Cleaning the dishes 29 November 2019 activities. "This was the first time such an operation was conducted on an ESA deep space antenna, and despite its complexity, all involved teams managed to conduct the activity smoothly returning the antenna to service within just a week." Scheduled maintenance of high-tech equipment also took place while the antenna power was off, as well as a series of frequency and timing enhancements, an upgrade of data routers and the installation of a new safety rail. Credit: ESA / Suzy Jackson On 6 November, during the antenna maintenance, the New Norcia site was visited by Hon. Kim Beazley AC, formerly Deputy Prime Minister and current Governor of Western Australia. Large antennas are our only current way of communicating through space across vast What are we looking at? distances, and every now and then they need to be spruced up to ensure we can keep in touch with The New Norcia station in Western Australia is one our deep-space exploration spacecraft. of three deep-space dishes in ESA's ESTRACK network. Early this November, ESA's Deep Space Antenna in New Norcia, Australia, was subject to major New Norcia currently supports several flying maintenance, with a wide range of updates spacecraft such as BepiColombo, Cluster, Gaia, implemented to keep it in pristine order. Mars Express and XMM. It will also support many of ESA's future missions including JUICE, Solar To communicate with ESA's fleet of spacecraft, the Orbiter and Euclid. position of the antenna needs to be controlled with high accuracy. The huge 35-metre diameter You can now find out which spacecraft these construction relies on gearboxes to alter its antennas are talking to at any moment, as well as position, offering sweeping views of every inch of other dishes in the network, with ESTRACK now. -

Phase Integral of Asteroids Vasilij G
A&A 626, A87 (2019) Astronomy https://doi.org/10.1051/0004-6361/201935588 & © ESO 2019 Astrophysics Phase integral of asteroids Vasilij G. Shevchenko1,2, Irina N. Belskaya2, Olga I. Mikhalchenko1,2, Karri Muinonen3,4, Antti Penttilä3, Maria Gritsevich3,5, Yuriy G. Shkuratov2, Ivan G. Slyusarev1,2, and Gorden Videen6 1 Department of Astronomy and Space Informatics, V.N. Karazin Kharkiv National University, 4 Svobody Sq., Kharkiv 61022, Ukraine e-mail: [email protected] 2 Institute of Astronomy, V.N. Karazin Kharkiv National University, 4 Svobody Sq., Kharkiv 61022, Ukraine 3 Department of Physics, University of Helsinki, Gustaf Hällströmin katu 2, 00560 Helsinki, Finland 4 Finnish Geospatial Research Institute FGI, Geodeetinrinne 2, 02430 Masala, Finland 5 Institute of Physics and Technology, Ural Federal University, Mira str. 19, 620002 Ekaterinburg, Russia 6 Space Science Institute, 4750 Walnut St. Suite 205, Boulder CO 80301, USA Received 31 March 2019 / Accepted 20 May 2019 ABSTRACT The values of the phase integral q were determined for asteroids using a numerical integration of the brightness phase functions over a wide phase-angle range and the relations between q and the G parameter of the HG function and q and the G1, G2 parameters of the HG1G2 function. The phase-integral values for asteroids of different geometric albedo range from 0.34 to 0.54 with an average value of 0.44. These values can be used for the determination of the Bond albedo of asteroids. Estimates for the phase-integral values using the G1 and G2 parameters are in very good agreement with the available observational data. -
Iso and Asteroids
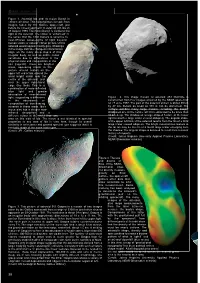
r bulletin 108 Figure 1. Asteroid Ida and its moon Dactyl in enhanced colour. This colour picture is made from images taken by the Galileo spacecraft just before its closest approach to asteroid 243 Ida on 28 August 1993. The moon Dactyl is visible to the right of the asteroid. The colour is ‘enhanced’ in the sense that the CCD camera is sensitive to near-infrared wavelengths of light beyond human vision; a ‘natural’ colour picture of this asteroid would appear mostly grey. Shadings in the image indicate changes in illumination angle on the many steep slopes of this irregular body, as well as subtle colour variations due to differences in the physical state and composition of the soil (regolith). There are brighter areas, appearing bluish in the picture, around craters on the upper left end of Ida, around the small bright crater near the centre of the asteroid, and near the upper right-hand edge (the limb). This is a combination of more reflected blue light and greater absorption of near-infrared light, suggesting a difference Figure 2. This image mosaic of asteroid 253 Mathilde is in the abundance or constructed from four images acquired by the NEAR spacecraft composition of iron-bearing on 27 June 1997. The part of the asteroid shown is about 59 km minerals in these areas. Ida’s by 47 km. Details as small as 380 m can be discerned. The moon also has a deeper near- surface exhibits many large craters, including the deeply infrared absorption and a shadowed one at the centre, which is estimated to be more than different colour in the violet than any 10 km deep. -
Appendix 1 1311 Discoverers in Alphabetical Order
Appendix 1 1311 Discoverers in Alphabetical Order Abe, H. 28 (8) 1993-1999 Bernstein, G. 1 1998 Abe, M. 1 (1) 1994 Bettelheim, E. 1 (1) 2000 Abraham, M. 3 (3) 1999 Bickel, W. 443 1995-2010 Aikman, G. C. L. 4 1994-1998 Biggs, J. 1 2001 Akiyama, M. 16 (10) 1989-1999 Bigourdan, G. 1 1894 Albitskij, V. A. 10 1923-1925 Billings, G. W. 6 1999 Aldering, G. 4 1982 Binzel, R. P. 3 1987-1990 Alikoski, H. 13 1938-1953 Birkle, K. 8 (8) 1989-1993 Allen, E. J. 1 2004 Birtwhistle, P. 56 2003-2009 Allen, L. 2 2004 Blasco, M. 5 (1) 1996-2000 Alu, J. 24 (13) 1987-1993 Block, A. 1 2000 Amburgey, L. L. 2 1997-2000 Boattini, A. 237 (224) 1977-2006 Andrews, A. D. 1 1965 Boehnhardt, H. 1 (1) 1993 Antal, M. 17 1971-1988 Boeker, A. 1 (1) 2002 Antolini, P. 4 (3) 1994-1996 Boeuf, M. 12 1998-2000 Antonini, P. 35 1997-1999 Boffin, H. M. J. 10 (2) 1999-2001 Aoki, M. 2 1996-1997 Bohrmann, A. 9 1936-1938 Apitzsch, R. 43 2004-2009 Boles, T. 1 2002 Arai, M. 45 (45) 1988-1991 Bonomi, R. 1 (1) 1995 Araki, H. 2 (2) 1994 Borgman, D. 1 (1) 2004 Arend, S. 51 1929-1961 B¨orngen, F. 535 (231) 1961-1995 Armstrong, C. 1 (1) 1997 Borrelly, A. 19 1866-1894 Armstrong, M. 2 (1) 1997-1998 Bourban, G. 1 (1) 2005 Asami, A. 7 1997-1999 Bourgeois, P. 1 1929 Asher, D. -
Nasa Technical Memorandum .1
NASA TECHNICAL MEMORANDUM NASA TM X-64677 COMETS AND ASTEROIDS: A Strategy for Exploration REPORT OF THE COMET AND ASTEROID MISSION STUDY PANEL May 1972 .1!vP -V (NASA-TE-X- 6 q767 ) COMETS AND ASTEROIDS: A RR EXPLORATION (NASA) May 1972 CSCL 03A NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Reproduced by ' NATIONAL "TECHINICAL INFORMATION: SERVICE US Depdrtmett ofCommerce :. Springfield VA 22151 TECHNICAL REPORT STANDARD TITLE PAGE · REPORT NO. 2. GOVERNMENT ACCESSION NO. 3, RECIPIENT'S CATALOG NO. NASA TM X-64677 . TITLE AND SUBTITLE 5. REPORT aE COMETS AND ASTEROIDS ___1_ A Strategy for Exploration 6. PERFORMING ORGANIZATION CODE AUTHOR(S) 8. PERFORMING ORGANIZATION REPORT # Comet and Asteroid Mission Study Panel PERFORMING ORGANIZATION NAME AND ADDRESS 10. WORK UNIT NO. 11. CONTRACT OR GRANT NO. 13. TYPE OF REPORT & PERIOD COVERED 2. SPONSORING AGENCY NAME AND ADDRESS National Aeronautics and Space Administration Technical Memorandum Washington, D. C. 20546 14. SPONSORING AGENCY CODE 5. SUPPLEMENTARY NOTES ABSTRACT Many of the asteroids probably formed near the orbits where they are found today. They accreted from gases and particles that represented the primordial solar system cloud at that location. Comets, in contrast to asteroids, probably formed far out in the solar system, and at very low temperatures; since they have retained their volatile components they are probably the most primordial matter that presently can be found anywhere in the solar system. Exploration and detailed study of comets and asteroids, therefore, should be a significant part of NASA's efforts to understand the solar system. A comet and asteroid program should consist of six major types of projects: ground-based observations;Earth-orbital observations; flybys; rendezvous; landings; and sample returns. -
ROSETTA RSI : Rosetta Radio Science Investigations Experiment User Manual Document RO -RSI -IGM -MA -3081 Issue: 4 Revision: 2 Date: 25.04.2016 Page: 1 of 144
ROSETTA RSI : Rosetta Radio Science Investigations Experiment User Manual Document RO -RSI -IGM -MA -3081 Issue: 4 Revision: 2 Date: 25.04.2016 Page: 1 of 144 ROSETTA Radio Science Investigations (RSI) Experiment User Manual Reference: RO-RSI-IGM-MA-3081 Issue: 4 Revision: 2 Rheinisches Institut für Umweltforschung, Abt. Planetenforschung Universität zu Köln Aachenerstr 209 D-50931 Köln Prepared by: ________________________________ ______________________________ Silvia Tellmann, Experiment Manager Approved by: __________________________________________ Martin Pätzold, Principal Investigator ROSETTA RSI : Rosetta Radio Science Investigations Experiment User Manual Document RO -RSI -IGM -MA -3081 Issue: 4 Revision: 2 Date: 25.04.2016 Page: 2 of 144 PAGE LEFT FREE ROSETTA RSI : Rosetta Radio Science Investigations Experiment User Manual Document RO -RSI -IGM -MA -3081 Issue: 4 Revision: 2 Date: 25.04.2016 Page: 3 of 144 Contents 1 Introduction ........................................................................................................ 10 1.1 Purpose ...................................................................................................... 10 1.2 Scope ......................................................................................................... 10 1.3 Applicable Documents ................................................................................ 10 1.4 Referenced Documents .............................................................................. 10 1.5 Abbreviations............................................................................................. -

The 4 Major Asteroids and Chiron Report For
The 4 Major Asteroids and Chiron Report for Oprah Winfrey 29 January 1954 4:30 Kosciusko, Mississippi Calculated for: Standard time, Time Zone 6 hours West Latitude: 33 N 03 27 Longitude: 89 W 35 15 Positions of Planets at Birth: Sun 9 Aqu 00 Asc. 29 Sag 41 Moon 4 Sag 32 MC 17 Lib 25 Mercury 19 Aqu 09 2nd cusp 5 Aqu 04 Venus 8 Aqu 51 3rd cusp 13 Pis 19 Mars 23 Sco 35 5th cusp 14 Tau 52 Jupiter 16 Gem 39 6th cusp 7 Gem 52 Saturn 9 Sco 03 Ceres 12 Lib 47 Uranus 20 Can 19 Pallas 6 Vir 23 Neptune 26 Lib 19 Juno 21 Leo 57 Pluto 24 Leo 19 Vesta 22 Pis 14 True Node23 Cap 19 Chiron 23 Cap 35 Aspects and orbs: Conjunction : 7 Deg 00 Min Trine : 5 Deg 00 Min Opposition : 6 Deg 00 Min Sextile : 3 Deg 00 Min Square : 4 Deg 00 Min Interpretations by astrologer Dave Campbell Report and Text Copyright By Cosmic Patterns Software, Inc. The contents of this report are protected by Copyright law. By purchasing this report you agree to comply with this Copyright. Profesional Astro Reports www.astro-reports.com [email protected] Chapter 1: Ceres Ceres in Libra: In order for you to feel nurtured you need to be treated with kindness, and harmony. You need cooperation to feel whole and loved, so the need to be in a relationship is strong with this placement. You are the peacemaker and that is how you nurture others, through kindness, sympathy, fairness and understanding. -

Electromagnetic Radiation and the Doppler Effect
Astronomers’ Observing Guides For further volumes: http://www.springer.com/series/5338 wwwwwwwwwwwww Richard Schmude, Jr. Arti fi cial Satellites and How to Observe Them Richard Schmude, Jr. 109 Tyus Street Barnesville, GA, USA ISSN 1611-7360 ISBN 978-1-4614-3914-1 ISBN 978-1-4614-3915-8 (eBook) DOI 10.1007/978-1-4614-3915-8 Springer NewYork Heidelberg Dordrecht London Library of Congress Control Number: 2012939432 © Springer Science+Business Media New York 2012 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, speci fi cally the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on micro fi lms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied speci fi cally for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc. in this publication does not imply, even in the absence of a speci fi c statement, that such names are exempt from the relevant protective laws and regulations and therefore free for general use.