Stream-Oriented Robotics Programming: the Design of Roshask
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CS 61A Streams Summer 2019 1 Streams
CS 61A Streams Summer 2019 Discussion 10: August 6, 2019 1 Streams In Python, we can use iterators to represent infinite sequences (for example, the generator for all natural numbers). However, Scheme does not support iterators. Let's see what happens when we try to use a Scheme list to represent an infinite sequence of natural numbers: scm> (define (naturals n) (cons n (naturals (+ n 1)))) naturals scm> (naturals 0) Error: maximum recursion depth exceeded Because cons is a regular procedure and both its operands must be evaluted before the pair is constructed, we cannot create an infinite sequence of integers using a Scheme list. Instead, our Scheme interpreter supports streams, which are lazy Scheme lists. The first element is represented explicitly, but the rest of the stream's elements are computed only when needed. Computing a value only when it's needed is also known as lazy evaluation. scm> (define (naturals n) (cons-stream n (naturals (+ n 1)))) naturals scm> (define nat (naturals 0)) nat scm> (car nat) 0 scm> (cdr nat) #[promise (not forced)] scm> (car (cdr-stream nat)) 1 scm> (car (cdr-stream (cdr-stream nat))) 2 We use the special form cons-stream to create a stream: (cons-stream <operand1> <operand2>) cons-stream is a special form because the second operand is not evaluated when evaluating the expression. To evaluate this expression, Scheme does the following: 1. Evaluate the first operand. 2. Construct a promise containing the second operand. 3. Return a pair containing the value of the first operand and the promise. 2 Streams To actually get the rest of the stream, we must call cdr-stream on it to force the promise to be evaluated. -

Chapter 2 Basics of Scanning And
Chapter 2 Basics of Scanning and Conventional Programming in Java In this chapter, we will introduce you to an initial set of Java features, the equivalent of which you should have seen in your CS-1 class; the separation of problem, representation, algorithm and program – four concepts you have probably seen in your CS-1 class; style rules with which you are probably familiar, and scanning - a general class of problems we see in both computer science and other fields. Each chapter is associated with an animating recorded PowerPoint presentation and a YouTube video created from the presentation. It is meant to be a transcript of the associated presentation that contains little graphics and thus can be read even on a small device. You should refer to the associated material if you feel the need for a different instruction medium. Also associated with each chapter is hyperlinked code examples presented here. References to previously presented code modules are links that can be traversed to remind you of the details. The resources for this chapter are: PowerPoint Presentation YouTube Video Code Examples Algorithms and Representation Four concepts we explicitly or implicitly encounter while programming are problems, representations, algorithms and programs. Programs, of course, are instructions executed by the computer. Problems are what we try to solve when we write programs. Usually we do not go directly from problems to programs. Two intermediate steps are creating algorithms and identifying representations. Algorithms are sequences of steps to solve problems. So are programs. Thus, all programs are algorithms but the reverse is not true. -

Akka Java Documentation Release 2.2.5
Akka Java Documentation Release 2.2.5 Typesafe Inc February 19, 2015 CONTENTS 1 Introduction 1 1.1 What is Akka?............................................1 1.2 Why Akka?..............................................3 1.3 Getting Started............................................3 1.4 The Obligatory Hello World.....................................7 1.5 Use-case and Deployment Scenarios.................................8 1.6 Examples of use-cases for Akka...................................9 2 General 10 2.1 Terminology, Concepts........................................ 10 2.2 Actor Systems............................................ 12 2.3 What is an Actor?.......................................... 14 2.4 Supervision and Monitoring..................................... 16 2.5 Actor References, Paths and Addresses............................... 19 2.6 Location Transparency........................................ 25 2.7 Akka and the Java Memory Model.................................. 26 2.8 Message Delivery Guarantees.................................... 28 2.9 Configuration............................................. 33 3 Actors 65 3.1 Actors................................................ 65 3.2 Typed Actors............................................. 84 3.3 Fault Tolerance............................................ 88 3.4 Dispatchers.............................................. 103 3.5 Mailboxes.............................................. 106 3.6 Routing................................................ 111 3.7 Building Finite State Machine -

File I/O Stream Byte Stream
File I/O In Java, we can read data from files and also write data in files. We do this using streams. Java has many input and output streams that are used to read and write data. Same as a continuous flow of water is called water stream, in the same way input and output flow of data is called stream. Stream Java provides many input and output stream classes which are used to read and write. Streams are of two types. Byte Stream Character Stream Let's look at the two streams one by one. Byte Stream It is used in the input and output of byte. We do this with the help of different Byte stream classes. Two most commonly used Byte stream classes are FileInputStream and FileOutputStream. Some of the Byte stream classes are listed below. Byte Stream Description BufferedInputStream handles buffered input stream BufferedOutputStrea handles buffered output stream m FileInputStream used to read from a file FileOutputStream used to write to a file InputStream Abstract class that describe input stream OutputStream Abstract class that describe output stream Byte Stream Classes are in divided in two groups - InputStream Classes - These classes are subclasses of an abstract class, InputStream and they are used to read bytes from a source(file, memory or console). OutputStream Classes - These classes are subclasses of an abstract class, OutputStream and they are used to write bytes to a destination(file, memory or console). InputStream InputStream class is a base class of all the classes that are used to read bytes from a file, memory or console. -
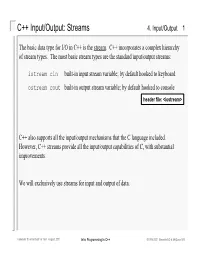
C++ Input/Output: Streams 4
C++ Input/Output: Streams 4. Input/Output 1 The basic data type for I/O in C++ is the stream. C++ incorporates a complex hierarchy of stream types. The most basic stream types are the standard input/output streams: istream cin built-in input stream variable; by default hooked to keyboard ostream cout built-in output stream variable; by default hooked to console header file: <iostream> C++ also supports all the input/output mechanisms that the C language included. However, C++ streams provide all the input/output capabilities of C, with substantial improvements. We will exclusively use streams for input and output of data. Computer Science Dept Va Tech August, 2001 Intro Programming in C++ ©1995-2001 Barnette ND & McQuain WD C++ Streams are Objects 4. Input/Output 2 The input and output streams, cin and cout are actually C++ objects. Briefly: class: a C++ construct that allows a collection of variables, constants, and functions to be grouped together logically under a single name object: a variable of a type that is a class (also often called an instance of the class) For example, istream is actually a type name for a class. cin is the name of a variable of type istream. So, we would say that cin is an instance or an object of the class istream. An instance of a class will usually have a number of associated functions (called member functions) that you can use to perform operations on that object or to obtain information about it. The following slides will present a few of the basic stream member functions, and show how to go about using member functions. -

Subtyping, Declaratively an Exercise in Mixed Induction and Coinduction
Subtyping, Declaratively An Exercise in Mixed Induction and Coinduction Nils Anders Danielsson and Thorsten Altenkirch University of Nottingham Abstract. It is natural to present subtyping for recursive types coin- ductively. However, Gapeyev, Levin and Pierce have noted that there is a problem with coinductive definitions of non-trivial transitive inference systems: they cannot be \declarative"|as opposed to \algorithmic" or syntax-directed|because coinductive inference systems with an explicit rule of transitivity are trivial. We propose a solution to this problem. By using mixed induction and coinduction we define an inference system for subtyping which combines the advantages of coinduction with the convenience of an explicit rule of transitivity. The definition uses coinduction for the structural rules, and induction for the rule of transitivity. We also discuss under what condi- tions this technique can be used when defining other inference systems. The developments presented in the paper have been mechanised using Agda, a dependently typed programming language and proof assistant. 1 Introduction Coinduction and corecursion are useful techniques for defining and reasoning about things which are potentially infinite, including streams and other (poten- tially) infinite data types (Coquand 1994; Gim´enez1996; Turner 2004), process congruences (Milner 1990), congruences for functional programs (Gordon 1999), closures (Milner and Tofte 1991), semantics for divergence of programs (Cousot and Cousot 1992; Hughes and Moran 1995; Leroy and Grall 2009; Nakata and Uustalu 2009), and subtyping relations for recursive types (Brandt and Henglein 1998; Gapeyev et al. 2002). However, the use of coinduction can lead to values which are \too infinite”. For instance, a non-trivial binary relation defined as a coinductive inference sys- tem cannot include the rule of transitivity, because a coinductive reading of transitivity would imply that every element is related to every other (to see this, build an infinite derivation consisting solely of uses of transitivity). -

Data-Trace Types for Distributed Stream Processing Systems
Data-Trace Types for Distributed Stream Processing Systems Konstantinos Mamouras Caleb Stanford Rajeev Alur Rice University, USA University of Pennsylvania, USA University of Pennsylvania, USA [email protected] [email protected] [email protected] Zachary G. Ives Val Tannen University of Pennsylvania, USA University of Pennsylvania, USA [email protected] [email protected] Abstract guaranteeing correct deployment, and (2) the throughput of Distributed architectures for efficient processing of stream- the automatically compiled distributed code is comparable ing data are increasingly critical to modern information pro- to that of hand-crafted distributed implementations. cessing systems. The goal of this paper is to develop type- CCS Concepts • Information systems → Data streams; based programming abstractions that facilitate correct and Stream management; • Theory of computation → Stream- efficient deployment of a logical specification of the desired ing models; • Software and its engineering → General computation on such architectures. In the proposed model, programming languages. each communication link has an associated type specifying tagged data items along with a dependency relation over tags Keywords distributed data stream processing, types that captures the logical partial ordering constraints over data items. The semantics of a (distributed) stream process- ACM Reference Format: ing system is then a function from input data traces to output Konstantinos Mamouras, Caleb Stanford, Rajeev Alur, Zachary data traces, where a data trace is an equivalence class of se- G. Ives, and Val Tannen. 2019. Data-Trace Types for Distributed quences of data items induced by the dependency relation. Stream Processing Systems. In Proceedings of the 40th ACM SIGPLAN Conference on Programming Language Design and Implementation This data-trace transduction model generalizes both acyclic (PLDI ’19), June 22–26, 2019, Phoenix, AZ, USA. -

Parsing with First-Class Derivatives
Parsing with First-Class Derivatives Jonathan Immanuel Brachthauser¨ Tillmann Rendel Klaus Ostermann rtifact A Comple * t * te n * A * te is W E s A e n C l l L o D C S University of Tubingen,¨ Germany o * * c P u e m s E u O e e n v R t e O o d t a y * s E a * fbrachthaeuser, rendel, [email protected] l u d a e t Abstract often reducing the modularity of their parser because these ad- Brzozowski derivatives, well known in the context of reg- hoc additions are cross-cutting with respect to the otherwise ular expressions, have recently been rediscovered to give a context-free syntactic structure of the language. simplified explanation to parsers of context-free languages. Parser combinators [10, 10, 15, 21, 22] are a parsing We add derivatives as a novel first-class feature to a standard approach that is well-suited for such ad-hoc additions. With parser combinator language. First-class derivatives enable an parser combinators, a parser is described as a first-class inversion of the control flow, allowing to implement modular entity in some host language, and parsers for smaller subsets parsers for languages that previously required separate pre- of a language are combined into parsers of larger subsets processing steps or cross-cutting modifications of the parsers. using built-in or user-defined combinators such as sequence, We show that our framework offers new opportunities for alternative, or iteration. The fact that parsers are first-class reuse and supports a modular definition of interesting use entities at runtime allows an elegant way of structuring cases of layout-sensitive parsing. -

Stream Computing Based Synchrophasor Application for Power Grids
Stream Computing Based Synchrophasor Application For Power Grids Jagabondhu Hazra Kaushik Das Deva P. Seetharam IBM Research, India IBM Research, India IBM Research, India [email protected] [email protected] [email protected] Amith Singhee IBM T J Watson Research Center, USA [email protected] ABSTRACT grid monitoring to identify and deal with faults before they develop This paper proposes an application of stream computing analytics into wide-spread disturbances. framework to high speed synchrophasor data for real time moni- In recent years, electric grids are undergoing dramatic changes toring and control of electric grid. High volume streaming syn- in the area of grid monitoring and control. Key factors behind chrophasor data from geographically distributed grid sensors (namely, such transformation includes tremendous progress in the areas of Phasor Measurement Units) are collected, synchronized, aggregated power electronics, sensing, control, computation and communi- when required and analyzed using a stream computing platform to cation technologies. For instant, conventional sensors (e.g. Re- estimate the grid stability in real time. This real time stability mon- mote Terminal Units) provide one measurement or sample per 4- itoring scheme will help the grid operators to take preventive or 10 seconds whereas new sensors like Phasor Measurement Units corrective measures ahead of time to mitigate any disturbance be- (PMUs) could provide upto 120 measurements or samples per sec- fore they develop into wide-spread. A protptype of the scheme is ond. Moreover, PMUs provide more precise measurements with demonstrated on a benchmark 3 machines 9 bus system and the time stamp having microsecond accuracy [2]. -

Preprocessing C++ : Meta-Class Aspects
Preprocessing C++ : Meta-Class Aspects Edward D. Willink Racal Research Limited, Worton Drive, Reading, England +44 118 923 8278 [email protected] Vyacheslav B. Muchnick Department of Computing, University of Surrey, Guildford, England +44 1483 300800 x2206 [email protected] ABSTRACT C++ satisfies the previously conflicting goals of Object-Orientation and run-time efficiency within an industrial strength language. Run-time efficiency is achieved by ignoring the meta-level aspects of Object-Orientation. In a companion paper [15] we show how extensions that replace the traditional preprocessor lexical substitution by an Object-Oriented meta-level substitution fit naturally into C++. In this paper, we place those extensions in the context of a compile-time meta-level, in which application meta-programs can execute to browse, check or create program declarations. An extended example identifies the marshalling aspect as a programming concern that can be fully separated and automatically generated by an application meta-program. Keywords Object-Oriented Language; Preprocessor; C++; Meta-Level; Composition; Weaving; Aspect-Oriented Programming; Pattern Implementation 1 INTRODUCTION Prior to C++, Object Orientation, as exemplified by Smalltalk, was perceived to be inherently inefficient because of the run-time costs associated with message dispatch. C++ introduced a more restrictive Object Model that enabled most of the run-time costs to be resolved by compile-time computation. As a result Object Orientation in C++ is efficient and widely used. C++ requires that the layout of objects be frozen at compile-time, and that the type of the recipient of any message is known. The layout constraint enables a single contiguous memory allocation for each object. -

Stream Fusion from Lists to Streams to Nothing at All
Stream Fusion From Lists to Streams to Nothing at All Duncan Coutts1 Roman Leshchinskiy2 Don Stewart2 1 Programming Tools Group 2 Computer Science & Engineering Oxford University Computing Laboratory University of New South Wales [email protected] {rl,dons}@cse.unsw.edu.au Abstract No previously implemented short-cut fusion system eliminates all This paper presents an automatic deforestation system, stream fu- the lists in this example. The fusion system presented in this paper sion, based on equational transformations, that fuses a wider range does. With this system, the Glasgow Haskell Compiler (The GHC Team 2007) applies all the fusion transformations and is able to of functions than existing short-cut fusion systems. In particular, 0 stream fusion is able to fuse zips, left folds and functions over generate an efficient “worker” function f that uses only unboxed nested lists, including list comprehensions. A distinguishing fea- integers (Int#) and runs in constant space: ture of the framework is its simplicity: by transforming list func- f 0 :: Int# → Int# tions to expose their structure, intermediate values are eliminated f 0 n = by general purpose compiler optimisations. let go :: Int# → Int# → Int# We have reimplemented the Haskell standard List library on top go z k = of our framework, providing stream fusion for Haskell lists. By al- case k > n of lowing a wider range of functions to fuse, we see an increase in the False → case 1 > k of number of occurrences of fusion in typical Haskell programs. We False → to (z + k) k (k + 1) 2 True → go z (k + 1) present benchmarks documenting time and space improvements. -

Warp: a Haskell Web Server
The Functional Web Warp: A Haskell Web Server Michael Snoyman • Suite Solutions oughly two years ago, I began work on about this runtime is its lightweight threads. As the Yesod Web framework. I originally a result of this feature, Warp simply spawns a R intended FastCGI for my deployment strat- new thread for each incoming connection, bliss- egy, but I also created a simple HTTP server for fully unaware of the gymnastics the runtime is local testing, creatively named SimpleServer. performing under the surface. Because Yesod targets the Web Application Part of this abstraction involves converting Interface (WAI), a standard interface between synchronous Haskell I/O calls into asynchro- Haskell Web servers and Web applications, it nous system calls. Once again, Warp reaps the was easy to switch back ends for testing and benefits by calling simple functions like recv production. and send, while GHC does the hard work. It didn’t take long before I started getting Up through GHC 6.12, this runtime sys- feature requests for SimpleServer: slowly but tem was based on the select system call. This surely, features such as chunked transfer encod- worked well enough for many tasks but didn’t ing and sendfile-based file serving made their scale for Web servers. One big feature of the way in. The tipping point was when Matt Brown GHC 7 release was a new event manager, written of Soft Mechanics made some minor tweaks by Google’s Johan Tibell and Serpentine’s Bryan to SimpleServer and found that it was already O’Sullivan. This new runtime uses different sys- the fastest Web server in Haskell (see Figure 1).