Fluid Fins, a Numerical Investigation on the Feasibility of Using Fluids As Shapeable Propulsive Appendages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mechanical Control of Fluid Viscosity Using 3D-Printed Functional Particles
Graduate Theses, Dissertations, and Problem Reports 2018 Smart Fluids Using Mechanics: Mechanical Control of Fluid Viscosity Using 3D-printed Functional Particles Rofiques Salehin Follow this and additional works at: https://researchrepository.wvu.edu/etd Recommended Citation Salehin, Rofiques, "Smart Fluids Using Mechanics: Mechanical Control of Fluid Viscosity Using 3D-printed Functional Particles" (2018). Graduate Theses, Dissertations, and Problem Reports. 7246. https://researchrepository.wvu.edu/etd/7246 This Thesis is protected by copyright and/or related rights. It has been brought to you by the The Research Repository @ WVU with permission from the rights-holder(s). You are free to use this Thesis in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you must obtain permission from the rights-holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/ or on the work itself. This Thesis has been accepted for inclusion in WVU Graduate Theses, Dissertations, and Problem Reports collection by an authorized administrator of The Research Repository @ WVU. For more information, please contact [email protected]. Smart Fluids Using Mechanics: Mechanical Control of Fluid Viscosity Using 3D-printed Functional Particles Rofiques Salehin Thesis submitted to the Benjamin M. Statler College of Engineering and Mineral Resources at West Virginia University in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering Stefanos Papanikolaou, Ph.D. , Chair Patrick Browning, Ph.D. Terence Musho, Ph.D. Department of Mechanical and Aerospace Engineering Morgantown, West Virginia 2018 Keywords: Molecular Dynamics, Functional Particles, Viscosity, SRD, Jamming Copyright 2018 Rofiques Salehin Smart Fluids Using Mechanics: Mechanical Control of Fluid Viscosity Using 3D-printed Functional Particles Rofiques Salehin Abstract It is common to manipulate fluid flow properties by infusing additives. -

Animafluid: a Dynamic Liquid Interface
Animafluid: A Dynamic Liquid Interface Muhammad Ali Hashmi Heamin Kim Abstract 75 Amherst St. 75 Amherst St. In this paper the authors describe a new tangible liquid interface based on ferromagnetic fluid. Our interface Cambridge, Cambridge, combines properties of both liquid and magnetism in a MA 02139 USA MA 02139 USA single interface which allows the user to directly [email protected] [email protected] interact with the liquid interface. Our dynamic liquid interface, which we call Animafluid, uses the physical Artem Dementyev Amir Lazarovich qualities of ferromagnetic fluids in combination with 75 Amherst St. 75 Amherst St. pressure sensors, microcontrollers for real-time Cambridge, Cambridge, interaction that combines both physical input and output. Our implementation is different from existing MA 02139 USA MA 02139 USA ferrofluid interventions and projects that harness [email protected] [email protected] magnetic liquid properties of ferromagnetic fluids in the sense that it adds tangibility of radical atoms design methodology to ferromagnetic fluids, thereby changing Hye Soo Yang the scope of interaction with the ferromagnetic fluid in 75 Amherst St. a drastic manner. Cambridge, MA 02139 USA Author Keywords [email protected] Tangible Interface; Ferrofluid; Dynamic Liquid Interface; Radical Atoms; Programmable Materiality ACM Classification Keywords H.5.2. Information interfaces and Presentation; User Interfaces Introduction Copyright is held by the author/owner(s). Ferromagnetic liquid is a material that has magnetic CHI’13, April 27 – May 2, 2013, Paris, France. and liquid properties. Ferromagnetic fluids have been used in a variety of different ways in the field of fluid dynamics. Our implementation imparts tangibility to the Prior Work liquid interface thus providing the design features of Our work is informed by prior work done on “Radical Atoms”, which envisions human interactions electromagnets-based interfaces and ferromagnetic with dynamic materials in a computationally fluids. -

A Guide to Fabrication and Applications
Nanomaterials A Guide to Fabrication and Applications © 2016 by Taylor & Francis Group, LLC Devices, Circuits, and Systems Series Editor Krzysztof Iniewski Emerging Technologies CMOS Inc. Vancouver, British Columbia, Canada PUBLISHED TITLES: Analog Electronics for Radiation Detection Renato Turchetta Atomic Nanoscale Technology in the Nuclear Industry Taeho Woo Biological and Medical Sensor Technologies Krzysztof Iniewski Building Sensor Networks: From Design to Applications Ioanis Nikolaidis and Krzysztof Iniewski Cell and Material Interface: Advances in Tissue Engineering, Biosensor, Implant, and Imaging Technologies Nihal Engin Vrana Circuits at the Nanoscale: Communications, Imaging, and Sensing Krzysztof Iniewski CMOS: Front-End Electronics for Radiation Sensors Angelo Rivetti CMOS Time-Mode Circuits and Systems: Fundamentals and Applications Fei Yuan Design of 3D Integrated Circuits and Systems Rohit Sharma Electrical Solitons: Theory, Design, and Applications David Ricketts and Donhee Ham Electronics for Radiation Detection Krzysztof Iniewski Electrostatic Discharge Protection: Advances and Applications Juin J. Liou Embedded and Networking Systems: Design, Software, and Implementation Gul N. Khan and Krzysztof Iniewski Energy Harvesting with Functional Materials and Microsystems Madhu Bhaskaran, Sharath Sriram, and Krzysztof Iniewski © 2016 by Taylor & Francis Group, LLC Devices, Circuits, and Systems PUBLISHED TITLES: Gallium Nitride (GaN): Physics, Devices, and Technology Farid Medjdoub Series Editor Krzysztof Iniewski Graphene, -

Determining the Flow Curves for an Inverse Ferrofluid
Korea-Australia Rheology Journal Vol. 20, No. 1, March 2008 pp. 35-42 Determining the flow curves for an inverse ferrofluid C. C. Ekwebelam and H. See* The School of Chemical and Biomolecular Engineering, The University of Sydney, Australia. NSW 2006 (Received Oct. 9, 2007; final revision received Jan. 30, 2008) Abstract An inverse ferrofluid composed of micron sized polymethylmethacrylate particles dispersed in ferrofluid was used to investigate the effects of test duration times on determining the flow curves of these materials under constant magnetic field. The results showed that flow curves determined using low duration times were most likely not measuring the steady state rheological response. However, at longer duration times, which are expected to correspond more to steady state behaviour, we noticed the occurrence of plateau and decreasing flow curves in the shear rate range of 0.004 s−1 to ~ 20 s−1, which suggest the presence of non- homogeneities and shear localization in the material. This behaviour was also reflected in the steady state results from shear start up tests performed over the same range of shear rates. The results indicate that care is required when interpreting flow curves obtained for inverse ferrofluids. Keywords : inverse ferrofluid, flow curve, shear localization 1. Introduction An IFF comprises a magnetisable carrier liquid, otherwise known as a ferrofluid, which is a colloidal dispersion of Field-responsive fluids are suspensions of micron-sized nano-sized magnetite particles. Into this we disperse particles which show a dramatic increase in flow resistance micron-sized non-magnetic solid particles, thereby pro- upon application of external magnetic or electrical fields. -

Magnetorheological Fluid and Its Applications
International Journal of Current Engineering and Technology E-ISSN 2277 – 4106, P-ISSN 2347 – 5161 ©2017 INPRESSCO®, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Magnetorheological Fluid and its Applications Pranav Gadekar*, V.S.Kanthale and N.D.Khaire Mechanical Department, MITCOE, Pune University, Pune, Maharashtra, India Accepted 12 March 2017, Available online 16 March 2017, Special Issue-7 (March 2017) Abstract A Magneto rheological Fluid (MRF) is a Smart fluid whose viscosity can be varied by application of magnetic field. The MR Fluid has vast applications in various engineering as well as day to day life. There is huge potential that this revolutionary material will provide many leading edge applications. The fluid has applications in various fields such as automotive industry, household applications, prosthetics, civil engineering, hydraulics, brakes and clutches, etc. Also there is a possible application of the fluid in reducing the effect of Gun Recoil. This paper will describe these applications and working of proposed application. Keywords: MR Fluid, Viscosity, Dampers, Prosthetics, Gun Recoil. 1. Introduction To take full advantage of MRF technologythe base fluid must have a low viscosity and it should be constant 1 Rheos is a Greek word to Flow. Rheology is the science with temperature. This is required for variation due to if material flow under external load conditions. The applied magnetic field to be more effective than natural word Magnetorheological Fluid means fluid whose viscosity. The presences of suspended particles make apparent viscosity increases, with application of base fluid thicker. Commonly used base fluids are MAGNETIC field. Also known as MR fluids, these fluids mineral oils, hydrocarbon oils, and Silicon oils. -
Numerical Simulations of Heat and Mass Transfer Flows Utilizing
CAPITAL UNIVERSITY OF SCIENCE AND TECHNOLOGY, ISLAMABAD Numerical Simulations of Heat and Mass Transfer Flows utilizing Nanofluid by Faisal Shahzad A thesis submitted in partial fulfillment for the degree of Doctor of Philosophy in the Faculty of Computing Department of Mathematics 2020 i Numerical Simulations of Heat and Mass Transfer Flows utilizing Nanofluid By Faisal Shahzad (DMT-143019) Dr. Noor Fadiya Mohd Noor, Assistant Professor University of Malaya, Kuala Lumpur, Malaysia (Foreign Evaluator 1) Dr. Fatma Ibrahim, Scientific Engineer Technische Universit¨atDortmund, Germany (Foreign Evaluator 2) Dr. Muhammad Sagheer (Thesis Supervisor) Dr. Muhammad Sagheer (Head, Department of Mathematics) Dr. Muhammad Abdul Qadir (Dean, Faculty of Computing) DEPARTMENT OF MATHEMATICS CAPITAL UNIVERSITY OF SCIENCE AND TECHNOLOGY ISLAMABAD 2020 ii Copyright c 2020 by Faisal Shahzad All rights reserved. No part of this thesis may be reproduced, distributed, or transmitted in any form or by any means, including photocopying, recording, or other electronic or mechanical methods, by any information storage and retrieval system without the prior written permission of the author. iii Dedicated to my beloved father and adoring mother who remain alive within my heart vii List of Publications It is certified that following publication(s) have been made out of the research work that has been carried out for this thesis:- 1. F. Shahzad, M. Sagheer, and S. Hussain, \Numerical simulation of magnetohydrodynamic Jeffrey nanofluid flow and heat transfer over a stretching sheet considering Joule heating and viscous dissipation," AIP Advances, vol. 8, pp. 065316 (2018), DOI: 10.1063/1.5031447. 2. F. Shahzad, M. Sagheer, and S. Hussain, \MHD tangent hyperbolic nanofluid with chemical reaction, viscous dissipation and Joule heating effects,” AIP Advances, vol. -

Magneto Static Analysis of Magneto Rheological Fluid Clutch
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-ISSN: 2278-1684,p-ISSN: 2320-334X, Volume 13, Issue 3 Ver. V (May- Jun. 2016), PP 35-42 www.iosrjournals.org Magneto Static Analysis of Magneto Rheological Fluid Clutch 1 3 K. Hema Latha , P. UshaSri², N.Seetharamaiah 1Assistant Professor, Dept. of Mechanical Engineering, MJCET, Hyderabad-34, INDIA, 2Professor, Dept. of Mechanical Engineering,UCEOU (A), Hyderabad-7, INDIA, 3Professor, Dept. of Mechanical Engineering, MJCET. Hyderabad-34, INDIA, Abstract: Smart fluid is defined as a fluid that acts as a Newtonian fluid until a specific external magneticfiel d is applied .When the field of the properstreng this applied, micrometer- sized particles suspended in a dielectric carrier fluid will align such that the resistance to flow of thesmart fluid, the viscosity, significantly increases and thus the fluid becomes quasi solid. In thispaper the design of a Magneto rheological (MR) Fluid Clutch consisting of multi plates, electromagnet, housing and the magnetostatic Analysis of the same is presented. A MR Fluid Clutch, is a device to transmit torque by shear stress of MR fluids, has the property that its power transmissibility changes quickly in response to control signal. A 2D Axisymmetric model based on finite element method(FEM) concept has been developed on the ANSYS Platform to analyse and examine the MR Fluid Clutch characteristics. A prototype of the MR Fluid Clutc his fabricated based on the FEM model.Magneto staticAnalysis of the MR Fluid Clutch consisdered was performed for yielding the magneticfield density of the magnetic coil used in the armature. Keywords: Magnetorheological fluid clutch, Newtonian fluid, quasi solid, dielectric carrier fluid, magnetic field density. -

Karami, Amin CV
M. A M I N K A R A M I 1013 Furnas Hall [email protected] State University of New York at Buffalo 716-645-5878 Buffalo, NY 14260-4400 https://ubwp.buffalo.edu/ideas EDUCATION VIRGINIA TECH Ph.D., Engineering Mechanics July 2011 Micro-Scale and Nonlinear Energy Harvesting. Blacksburg, VA Advisor: Prof. Daniel J. Inman. GPA: 4.0/4.0. THE UNIVERSITY OF M.A.Sc., Mechanical Engineering June 2006 BRITISH COLUMBIA Space Vehicle Motion Recovery in the Presence of Actuator Failure. Advisor: Prof. Farrokh Sassani. Vancouver, BC, GPA: 86/100. Canada SHARIF UNIVERSITY B.S., Mechanical Engineering July 2004 OF TECHNOLOGY Recognized as a student with special talent, ranked #3 in class of ~140. GPA: 18.05/20. Tehran, Iran ACADEMIC POSITIONS AUG 2013-PRESENT Assistant Professor, Department of Mechanical and Aerospace Engineering, State University of New York at Buffalo, Buffalo, NY AUG 2013-PRESENT Adjunct Assistant Research Scientist, Department of Aerospace Engineering, University of Michigan, Ann Arbor, MI AUG 2012-AUG 2013 Research Fellow, Department of Aerospace Engineering, the University of Michigan, Ann Arbor, MI HONORS AND AWARDS Keynote Speaker 2016 Hong Kong Science Park Soft Landing program. Invited Speaker 2015 Medtronic Technical Forum, Minneapolis. Keynote Speaker 2015 MedTechWorld MD&M east medical conference, New York. Best Student Hardware Award 2011 ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems First Oral Presentation Award 2011 GSA Annual Symposium, Virginia Tech. Daniel Frederick Scholarship 2010 Virginia Tech. Invited Speaker at ICTAS seminar series 2009 Presenting the only student seminar, Virginia Tech. ICTAS Doctoral Fellowship 2007-2011 Full financial and travel support, ICTAS, Virginia Tech. -

Advances in Liquid Metal-Enabled Flexible and Wearable Sensors
micromachines Review Advances in Liquid Metal-Enabled Flexible and Wearable Sensors Yi Ren 1 , Xuyang Sun 2 and Jing Liu 1,2,* 1 Department of Biomedical Engineering, School of Medicine, Tsinghua University, Beijing 100084, China; [email protected] 2 Beijing Key Lab of CryoBiomedical Engineering and Key Lab of Cryogenics, Technical Institute of Physics and Chemistry, Chinese Academy of Sciences, Beijing 100190, China; [email protected] * Correspondence: [email protected]; Tel.: 86-10-62794896 Received: 8 January 2020; Accepted: 13 February 2020; Published: 15 February 2020 Abstract: Sensors are core elements to directly obtain information from surrounding objects for further detecting, judging and controlling purposes. With the rapid development of soft electronics, flexible sensors have made considerable progress, and can better fit the objects to detect and, thus respond to changes more sensitively. Recently, as a newly emerging electronic ink, liquid metal is being increasingly investigated to realize various electronic elements, especially soft ones. Compared to conventional soft sensors, the introduction of liquid metal shows rather unique advantages. Due to excellent flexibility and conductivity, liquid-metal soft sensors present high enhancement in sensitivity and precision, thus producing many profound applications. So far, a series of flexible and wearable sensors based on liquid metal have been designed and tested. Their applications have also witnessed a growing exploration in biomedical areas, including health-monitoring, electronic skin, wearable devices and intelligent robots etc. This article presents a systematic review of the typical progress of liquid metal-enabled soft sensors, including material innovations, fabrication strategies, fundamental principles, representative application examples, and so on. -

Development of a Ferrofluid Based Soft Actuator Using Magnetic Field Optimization
Development of a Ferrofluid Based Soft Actuator Using Magnetic Field Optimization by Tasnova Tanzil Khan A thesis submitted in partial fulfillment of the requirements for the degree of Master of Engineering in Mechatronics Examination Committee: Dr. A.M. Harsha S. Abeykoon (Chairperson) Dr. Tanujjal Bora (Co-Chairperson) Prof. Manukid Parnichkun Dr. Gabriel Louis Hornyak Nationality: Bangladeshi Previous Degree: Bachelor of Science in Electrical and Electronic Engineering United International University, Bangladesh Scholarship Donor: AIT Fellowship Asian Institute of Technology School of Engineering and Technology Thailand May 2019 ACKNOWLEDGEMENTS I would like to show my heart felt gratitude to Dr. A.M. Harsha S. Abeykoon, my advisor, for his teaching, guidance, and suggestion during my academic period at AIT. I am also lucky to have him as my thesis advisor. I would also like to thank Dr. Tanujjal Bora, my Co-chairperson, for his valuable advice, guidance and motivation during my thesis. I also appreciate of Prof. Manukid Parnichkun and Dr. Gabriel Louis Hornyak for their constant invaluable comments and guidance. I am grateful to Asian Institute of Technology, for supporting me with fellowship to pursue Master of Engineering at AIT. Lastly, I am truly grateful to my mother, my husband, my daughter and all my family members and friends for the constant supports and motivation. ii ABSTRACT A new approach of ferrrofluid based soft actuator which shows various vertical motions has been introduced in this study. The flexibility and potential of the prototype made, was tested during this thesis by simulation and experimental approach. The simplicity of the design make the system more cost effective and readily made. -

Magnetic Fluid Rheology and Flows
Current Opinion in Colloid & Interface Science 10 (2005) 141 – 157 www.elsevier.com/locate/cocis Magnetic fluid rheology and flows Carlos Rinaldi a,1, Arlex Chaves a,1, Shihab Elborai b,2, Xiaowei (Tony) He b,2, Markus Zahn b,* a University of Puerto Rico, Department of Chemical Engineering, P.O. Box 9046, Mayaguez, PR 00681-9046, Puerto Rico b Massachusetts Institute of Technology, Department of Electrical Engineering and Computer Science and Laboratory for Electromagnetic and Electronic Systems, Cambridge, MA 02139, United States Available online 12 October 2005 Abstract Major recent advances: Magnetic fluid rheology and flow advances in the past year include: (1) generalization of the magnetization relaxation equation by Shliomis and Felderhof and generalization of the governing ferrohydrodynamic equations by Rosensweig and Felderhof; (2) advances in such biomedical applications as drug delivery, hyperthermia, and magnetic resonance imaging; (3) use of the antisymmetric part of the viscous stress tensor due to spin velocity to lower the effective magnetoviscosity to zero and negative values; (4) and ultrasound velocity profile measurements of spin-up flow showing counter-rotating surface and co-rotating volume flows in a uniform rotating magnetic field. Recent advances in magnetic fluid rheology and flows are reviewed including extensions of the governing magnetization relaxation and ferrohydrodynamic equations with a viscous stress tensor that has an antisymmetric part due to spin velocity; derivation of the magnetic susceptibility -
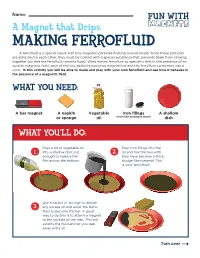
Make a Ferrofluid
Name: FFUNUN WWITHITH MAGNETS A Magnet that Drips: MAKING FERROFLUID A ferrofl uid is a special liquid with tiny magnetic particles fl oating around inside. Since these particles are attracted to each other, they must be coated with a special substance that prevents them from sticking together (so that the ferrofl uid remains fl uid). What makes ferrofl uid so special is that in the presence of an outside magnetic fi eld, each of the tiny particles becomes magnetized and the ferrofl uid condenses into a solid. In this activity you will be able to make and play with your own ferrofl uid and see how it behaves in the presence of a magnetic fi eld. WHAT YOU NEED: A bar magnet A napkin Vegetable Iron fi lings A shallow or sponge oil (from the hardware store) dish WHAT YOU’LL DO: Pour a bit of vegetable oil Pour iron fi lings into the 1. into a shallow dish, just 2. oil and mix the two until enough to make a thin they have become a thick, fi lm across the bottom. sludge-like material. This is your ferrofl uid! Use a napkin or sponge to absorb 3. any excess oil and allow the ferro- fl uid to become thicker. A good way to do this is to attach a magnet to the outside of the dish. This will solidify the fl uid and let you dab away extra oil. Turn over FFUNUN WWITHITH MAGNETS MAKINGDRAWING FERROFLUIDFIELD LINES Attach a magnet to the dish 4. containing the ferrofl uid; the fl uid will solidify and take the shape of the magnetic fi eld it is in! Removing the magnetic fi eld will allow the ferrofl uid to fl ow like a liquid again.