A Methodology for Selecting an Electromagnetic Gun System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
US2510669.Pdf
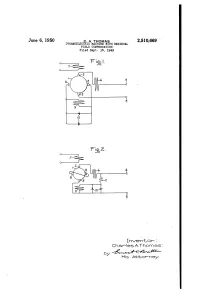
June 6, 1950 C. A. THOMAS 2,510,669 DYNAMOELECTRICMACHINE WITH RESIDUAL FIELD COMPENSATION Filed Sept. 15, 1949 InN/entor : Charles A.Thomas : -2-YHis attorney. 213-4- - Patented June 6, 1950 2,510,669 UNITED STATES PATENT OFFICE 2,510,669 DYNAMoELECTRIC MACHINE WITH RESD UAL FIELD coMPENSATION Charles A. Thomas, Fort Wayne, Ind., assignor - to General Electric Company, a corporation of New York Application September 15, 1949, Serial No. 115,907 2 Claims. (Cl. 322-79) 2 My invention relates to dynamoelectric ma volves added expense and requires additional chines incorporating means for eliminating field maintenance. excitation which is due to residual magnetism It is, therefore, another object of my inven in the field and, more particularly, to dynamo tion to provide a dynamoelectric machine in electric machines having residual field Com Corporating a residual field compensator which pensating windings and associated non-linear does not require additional Switches or auxiliary impedance elements for rendering said windings contacts, but which is, nevertheless, effective inoperative when not required, without the use during periods of zero field excitation by the of switches. control field Windings and ineffective when the in certain types of dynamoelectric machines, O control windings supply excitation. the presence of the usual residual magnetization My invention, therefore, Consists essentially remaining in the field poles of the machine after of a dynamoelectric machine having a residual field excitation has been removed is undesired magnetization compensator which includes a and troublesone. This is especially true in ar- . compensator field winding connected in the air nature reaction excited dynamoelectric ma 5 nature circuit of the machine and associated chines having compensation for secondary ar non-linear impedance elements to render the nature reaction and commonly known as ampli winding ineffective when normal field excitation dynes. -
The University of Texas at Austin
The University of Texas at Austin Institute for Advanced Technology, The University of Texas at Austin - AUSA - February 2006 IAT Talk 1358 Eraser Institute for Advanced Technology, The University of Texas at Austin - AUSA - February 2006 IAT Talk 1358 Transitioning EM Railgun Technology to the Warfighter Dr. Harry D. Fair, Director Institute for Advanced Technology The University of Texas at Austin The Governator is correct! • At the IAT, we are harnessing large quantities of electric energy to enable radically new capabilities for the warfighter. • These new electric weapons are capable of accelerating high energy hypervelocity projectiles Electric guns are real. from electric railguns on land, sea, and air platforms, and are capable of protecting these platforms by electromagnetic protection systems. Institute for Advanced Technology, The University of Texas at Austin - AUSA - February 2006 IAT Talk 1358 Hypervelocity Electromagnetic Railguns What are they? How do they work? Why change to electromagnetic energy? How can we use them? When can we have them? What are the implications for the Army and the Navy? Institute for Advanced Technology, The University of Texas at Austin - AUSA - February 2006 IAT Talk 1358 What is an Electromagnetic Railgun? Converts Electricity to Kinetic Energy The barrel can have any cross section - round, The accelerating Force square, rectangular is provided by Electromagnetic Forces and can accelerate projectiles to very high velocities Force Muzzle view We routinely launch projectiles to hypervelocities -

Alternator Winding Temperature Rise in Generator Systems
TM Information Sheet # 55 Alternator Winding Temperature Rise in Your Reliable Guide for Power Solutions Generator Systems 1.0 Introduction: When a wire carries electrical current, its temperature will increase due to the resistance of the wire. The factor that mostly influences/ limits the acceptable level of temperature rise is the insulation system employed in an alternator. So the hotter the wire, the shorter the life expectancy of the insulation and thus the alternator. This information sheets discusses how different applications influence temperature rise in alternator windings and classification standards are covered by the National electrical Manufacturers Association (NEMA). (Continued over) Table 1 - Maximum Temperature Rise (40°C Ambient) Continuous Temperature Rise Class A Class B Class F Class H Temp. Rise °C 60 80 105 125 Temp. Rise °F 108 144 189 225 Table 2 - Maximum Temperature Rise (40°C Ambient) Standby Temperature Rise Class A Class B Class F Class H Temp. Rise °C 85 105 130 150 Temp. Rise °F 153 189 234 270 Typical Windings Within a Generator Set’s Alternator Excitor windings Stator windings Rotor windings To fulfill our commitment to be the leading supplier and preferred service provider in the Power Generation Industry, the Clifford Power Systems, Inc. team maintains up-to-date technology and information standards on Power Industry changes, regulations and trends. As a service, our Information Sheets are circulated on a regular basis, to existing and potential Power Customers to maintain awareness of changes and -

Appendix B: Soft Starter Application Considerations BBB
AAPPENDIXPPENDIX APPENDIX B: SOFT STARTER APPLICATION CONSIDERATIONS BBB TABLE OF CONTENTS Appendix B: Soft Starter Application Considerations �� � � � � � � � � � � � � � � � � � � � � � � B–1 B�1 – Motor Suitability and Associated Considerations� � � � � � � � � � � � � � � � � � � � � B–2 B�1�1 – Suitability� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�2 – Induction Motor Characteristics �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�3 – Rating� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�4 – Maximum Motor Cable Length� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�5 – Power Factor Correction Capacitors �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�6 – Lightly Loaded Small Motors � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�7 – Motors Installed with Integral Brakes � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�8 – Older Motors� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�9 – Wound-rotor or Slip-ring Motors � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�10 – Enclosures � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�11 – Efficiency �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–4 B�1�12 – High-Efficiency Motors � � � � � � -

Overlapped Electromagnetic Coilgun for Low Speed Projectiles
ISSN (Print) 1226-1750 ISSN (Online) 2233-6656 Journal of Magnetics 20(3), 322-329 (2015) http://dx.doi.org/10.4283/JMAG.2015.20.3.322 Overlapped Electromagnetic Coilgun for Low Speed Projectiles Hany M. Mohamed1, Mahmoud A. Abdalla2*, Abdelazez Mitkees, and Waheed Sabery Electrical Engineering Branch, MTC College, Cairo, Egypt [email protected] [email protected] (Received 20 February 2015, Received in final form 16 June 2015, Accepted 16 June 2015) This paper presents a new overlapped coilgun configuration to launch medium weight projectiles. The proposed configuration consists of a two-stage coilgun with overlapped coil covers with spacing between them. The theoretical operation of a multi-stage coilgun is introduced, and a transient simulation was conducted for projectile motion through the launcher by using a commercial transient finite element software, ANSOFT MAXWELL. The excitation circuit design for each coilgun is reported, and the results indicate that the overlapped configuration increased the exit velocity relative to a non-overlapped configuration. Different configurations in terms of the optimum length and switching time were attempted for the proposed structure, and all of these cases exhibited an increase in the exit velocity. The exit velocity tends to increase by 27.2% relative to that of a non-overlapped coilgun of the same length. Keywords : electromagnetic launch, excitation circuit, lorentz force, overlapped coilgun 1. Introduction is not easy to obtain the main performance parameters and optimize the design [3]. Electromagnetic (EM) launch technology is a strong Sandia National Laboratories has succeeded in coilgun candidate to launch objects with high velocities over long design and operations by developing four guns with distances. -

Parameters Effects on Force in Tubular Linear Induction Motors with Blocked Rotor
Proc. of the 5th WSEAS/IASME Int. Conf. on Electric Power Systems, High Voltages, Electric Machines, Tenerife, Spain, December 16-18, 2005 (pp92-97) Parameters Effects on Force in Tubular Linear Induction Motors with Blocked Rotor REZA HAGHMARAM(1,2), ABBAS SHOULAIE(2) (1) Department of Electrical Engineering, Imam Hosein University, Babaie Highway, Tehran (2) Department of Electrical Engineering, Iran University of Science & Technology, Narmak, Tehran IRAN Abstract: This paper is concerned with the study of several parameters effects on longitudinal force applied on the rotor in the generator driven air-core tubular linear induction motors with blocked rotor. With developing the motor modeling by involving temperature equations in the previous computer code, we first study variations of the coils and rings temperatures and the effect of the temperature on the rotor force. In the next section, the effect of the rotor length on the rotor force is studied and it is shown that there is an almost linear relation between the rotor length and the rotor force. Finally we have given the optimum time step for solving the state equations of the motor and calculating the force. By this time step the code will have reasonable speed and accuracy. These studies can be useful for the force motors and for finding a view for dynamic state analysis of the acceleration motors. Keywords: - Air Core Tubular Linear Induction Motor, Coilgun, Linear Induction Launcher 1 Introduction the value of coils and rings currents and calculating Tubular Linear Induction Motors (TLIMs) may the gradient of mutual inductance between coils and have unique applications as electromagnetic rings, we can calculate the force applied on the launchers with very high speed and acceleration rotor [3]. -

Introduction to Direct Current (DC) Theory
PDHonline Course E235 (4 PDH) Electrical Fundamentals - Introduction to Direct Current (DC) Theory Instructor: A. Bhatia, B.E. 2012 PDH Online | PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.PDHonline.org www.PDHcenter.com An Approved Continuing Education Provider CHAPTER 3 DIRECT CURRENT LEARNING OBJECTIVES Upon completing this chapter, you will be able to: 1. Identify the term schematic diagram and identify the components in a circuit from a simple schematic diagram. 2. State the equation for Ohm's law and describe the effects on current caused by changes in a circuit. 3. Given simple graphs of current versus power and voltage versus power, determine the value of circuit power for a given current and voltage. 4. Identify the term power, and state three formulas for computing power. 5. Compute circuit and component power in series, parallel, and combination circuits. 6. Compute the efficiency of an electrical device. 7. Solve for unknown quantities of resistance, current, and voltage in a series circuit. 8. Describe how voltage polarities are assigned to the voltage drops across resistors when Kirchhoff's voltage law is used. 9. State the voltage at the reference point in a circuit. 10. Define open and short circuits and describe their effects on a circuit. 11. State the meaning of the term source resistance and describe its effect on a circuit. 12. Describe in terms of circuit values the circuit condition needed for maximum power transfer. 13. Compute efficiency of power transfer in a circuit. 14. Solve for unknown quantities of resistance, current, and voltage in a parallel circuit. -
High Efficiency Megawatt Motor Conceptual Design
High Efficiency Megawatt Motor Conceptual Design Ralph H. Jansen, Yaritza De Jesus-Arce, Dr. Rodger Dyson, Dr. Andrew Woodworth, Dr. Justin Scheidler, Ryan Edwards, Erik Stalcup, Jarred Wilhite, Dr. Kirsten Duffy, Paul Passe and Sean McCormick NASA Glenn Research Center, Cleveland, Ohio, 44135 Advanced Air Vehicles Program Advanced Transport Technologies Project Motivation • NASA is investing in Electrified Aircraft Propulsion (EAP) research to improve the fuel efficiency, emissions, and noise levels in commercial transport aircraft • The goal is to show that one or more viable EAP concepts exist for narrow- body aircraft and to advance crucial technologies related to those concepts. • Electric Machine technology needs to be advanced to meet aircraft needs. Advanced Air Vehicles Program Advanced Transport Technologies Project 2 Outline • Machine features • Importance of electric machine efficiency for aircraft applications • HEMM design requirements • Machine design • Performance Estimate and Sensitivity • Conclusion Advanced Air Vehicles Program Advanced Transport Technologies Project 3 NASA High Efficiency Megawatt Motor (HEMM) Power / Performance • HEMM is a 1.4MW electric machine with a stretch performance goal of 16 kW/kg (ratio to EM mass) and efficiency of >98% Machine Features • partially superconducting (rotor superconducting, stator normal conductors) • synchronous wound field machine that can operate as a motor or generator • combines a self-cooled, superconducting rotor with a semi- slotless stator Vehicle Level Benefits • -

Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles
Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles W.A. Walls and M. Driga Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712 Abstract than not, these test machines were merely modified gener- ators fitted with damper bars to lower impedance suffi- As technology for hybrid-electric propulsion, electric ciently to allow brief high current pulses needed for the weapons and defensive systems are developed for future experiment at hand. The late 1970's brought continuing electric combat vehicles, pulsed rotating electric machine research in fusion power, renewed interest in electromag- technologies can be adapted and evolved to provide the netic guns and other pulsed power users in the high power, maximum benefit to these new systems. A key advantage of intermittent duty regime. Likewise, flywheels have been rotating machines is the ability to design for combined used to store kinetic energy for many applications over the requirements of energy storage and pulsed power. An addi - years. In some cases (like utility generators providing tran- tional advantage is the ease with which these machines can sient fault ride-through capability), the functions of energy be optimized to service multiple loads. storage and power generation have been combined. Continuous duty alternators can be optimized to provide Development of specialized machines that were optimized prime power energy conversion from the vehicle engine. for this type of pulsed duty was needed. In 1977, the laser This paper, however, will focus on pulsed machines that are fusion community began looking for an alternative power best suited for intermittent and pulsed loads requiring source to capacitor banks for driving laser flashlamps. -
![Arxiv:1701.07063V2 [Physics.Ins-Det] 23 Mar 2017 ACCEPTED by IEEE TRANSACTIONS on PLASMA SCIENCE, MARCH 2017 1](https://docslib.b-cdn.net/cover/7647/arxiv-1701-07063v2-physics-ins-det-23-mar-2017-accepted-by-ieee-transactions-on-plasma-science-march-2017-1-377647.webp)
Arxiv:1701.07063V2 [Physics.Ins-Det] 23 Mar 2017 ACCEPTED by IEEE TRANSACTIONS on PLASMA SCIENCE, MARCH 2017 1
This work has been accepted for publication by IEEE Transactions on Plasma Science. The published version of the paper will be available online at http://ieeexplore.ieee.org. It can be accessed by using the following Digital Object Identifier: 10.1109/TPS.2017.2686648. c 2017 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, including reprinting/republishing this material for advertising or promotional purposes, collecting new collected works for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. arXiv:1701.07063v2 [physics.ins-det] 23 Mar 2017 ACCEPTED BY IEEE TRANSACTIONS ON PLASMA SCIENCE, MARCH 2017 1 Review of Inductive Pulsed Power Generators for Railguns Oliver Liebfried Abstract—This literature review addresses inductive pulsed the inductor. Therefore, a coil can be regarded as a pressure power generators and their major components. Different induc- vessel with the magnetic field B as a pressurized medium. tive storage designs like solenoids, toroids and force-balanced The corresponding pressure p is related by p = 1 B2 to the coils are briefly presented and their advantages and disadvan- 2µ tages are mentioned. Special emphasis is given to inductive circuit magnetic field B with the permeability µ. The energy density topologies which have been investigated in railgun research such of the inductor is directly linked to the magnetic field and as the XRAM, meat grinder or pulse transformer topologies. One therefore, its maximum depends on the tensile strength of the section deals with opening switches as they are indispensable for windings and the mechanical support. -

A Dc–Dc Converter with High-Voltage Step-Up Ratio and Reduced- Voltage Stress for Renewable Energy Generation Systems
A DC–DC CONVERTER WITH HIGH-VOLTAGE STEP-UP RATIO AND REDUCED- VOLTAGE STRESS FOR RENEWABLE ENERGY GENERATION SYSTEMS A Dissertation by Satya Veera Pavan Kumar Maddukuri Master of Science, University of Greenwich, UK, 2012 Bachelor of Technology, Jawaharlal Nehru Technology University Kakinada, India, 2010 Submitted to the Department of Electrical Engineering and Computer Science and the faculty of the Graduate School of Wichita State University in partial fulfillment of the requirements for the degree of Doctor of Philosophy December 2018 1 © Copyright 2018 by Satya Veera Pavan Kumar Maddukuri All Rights Reserved 1 A DC–DC CONVERTER WITH HIGH-VOLTAGE STEP-UP RATIO AND REDUCED- VOLTAGE STRESS FOR RENEWABLE ENERGY GENERATION SYSTEMS The following faculty members have examined the final copy of this dissertation for form and content and recommend that it be accepted in partial fulfillment of the requirement for the degree of Doctor of Philosophy with a major in Electrical Engineering and Computer Science. ___________________________________ Aravinthan Visvakumar, Committee Chair ___________________________________ M. Edwin Sawan, Committee Member ___________________________________ Ward T. Jewell, Committee Member ___________________________________ Chengzong Pang, Committee Member ___________________________________ Thomas K. Delillo, Committee Member Accepted for the College of Engineering ___________________________________ Steven Skinner, Interim Dean Accepted for the Graduate School ___________________________________ Dennis Livesay, Dean iii DEDICATION To my parents, my wife, my in-laws, my teachers, and my dear friends iv ACKNOWLEDGMENTS Firstly, I would like to express my sincere gratitude to my advisor Dr. Aravinthan Visvakumar for the continuous support of my PhD study and related research, for his thoughtful patience, motivation, and immense knowledge. His guidance helped me in all the time of research and writing of this dissertation. -

Instructor's Guide
Instructor’s Guide Electricity: A 3-D Animated Demonstration ELECTRICITY AND MAGNETISM Introduction This instructor’s guide provides information to help you get the most out of Electricity and Magnetism, part of the eight-part series Electricity: A 3-D Animated Demonstration. The series makes the principles of electricity easier to understand and discuss. The series includes Electrostatics; Electric Current; Ohm's Law; Circuits; Power and Efficiency; Electricity and Magnetism; Electric Motors; and Electric Generators. Electricity and Magnetism traces the relationship between magnetism and electricity from the first accidental discovery of induced current. Learning Objectives After watching the video program, students will be able to: • Describe the relationship between electricity and magnetism • Explain the difference between electric and magnetic fields • Explain the construct, function, and use of solenoids • Differentiate between, explain, and apply the left-hand and right-hand rules • Demonstrate (via experiments) and explain aspects, and actions and functions of electricity, magnetism, and electromagnetism Educational Standards National Science Standards This program correlates with the National Science Education Standards from the National Academies of Science, and Project 2061, from the American Association for the Advancement of Science. Copyright © 2008 SHOPWARE® • www.shopware-usa.com • 1-800-487-3392 Electricity: A 3-D Animated Demonstration ELECTRICITY AND MAGNETISM INSTRUCTOR’S GUIDE Science as Inquiry Content Standard A: