Scalable Event Tracking on High-End Parallel Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Year in Review 2 NEWSLINE January 7, 2011 2010: S&T Achievement and Building for the Future
Published for Nthe employees of LawrenceEWSLINE Livermore National Laboratory January 7, 2011 Vol. 4, No. 1 Year in review 2 NEWSLINE January 7, 2011 2010: S&T achievement and building for the future hile delivering on its mission obligations with award-winning sci- ence and technology, the Laboratory also spent 2010 building for the future. W In an October all-hands address, Director George Miller said his top priori- ties are investing for the future in programmatic growth and the underpinning infrastructure, as well as recruiting and retaining top talent at the Lab. In Review “It’s an incredibly exciting situation we find ourselves in,” Miller said in an earlier talk about the Lab’s strategic outlook. “If you look at the set of issues facing the country, the Laboratory has experience in all of them.” Defining “national security” broadly, Miller said the Lab will continue to make vital contributions to stockpile stewardship, homeland security, nonprolif- eration, arms control, the environment, climate change and sustainable energy. “Energy, environment and climate change are national security issues,” he said. With an eye toward accelerating the development of technologies that benefit national security and industry, the Lab partnered with Sandia-Calif. to launch the Livermore Valley Open Campus (LVOC) on the Lab’s southeast side. Construction has begun on an R&D campus outside the fence that will allow for collaboration in a broad set of disciplines critical to the fulfillment DOE/NNSA missions and to strengthening U.S. industry’s economic competitiveness, includ- If you look at the set of issues facing ing high-performance computing, energy, cyber security and environment. -

FY 2005 Annual Performance Evaluation and Appraisal Lawrence Livermore National Laboratory (Rev
Description of document: FY 2005 Annual Performance Evaluation and Appraisal Lawrence Livermore National Laboratory (Rev. 1 June 15, 2006) Requested date: 26-January-2007 Released date: 11-September-2007 Posted date: 15-October-2007 Title of Document Fiscal Year 2005 Annual Performance Evaluation and Appraisal Lawrence Livermore National Laboratory Date/date range of document: FY 2005 Source of document: Department of Energy National Nuclear Security Administration Service Center P.O. Box 5400 Albuquerque, NM 87185 Freedom of Information Act U.S. Department of Energy 1000 Independence Ave., S.W. Washington, DC 20585 (202) 586-5955 [email protected] http://management.energy.gov/foia_pa.htm The governmentattic.org web site (“the site”) is noncommercial and free to the public. The site and materials made available on the site, such as this file, are for reference only. The governmentattic.org web site and its principals have made every effort to make this information as complete and as accurate as possible, however, there may be mistakes and omissions, both typographical and in content. The governmentattic.org web site and its principals shall have neither liability nor responsibility to any person or entity with respect to any loss or damage caused, or alleged to have been caused, directly or indirectly, by the information provided on the governmentattic.org web site or in this file. Department of Energy National Nuclear Security Administration Service Center P. O. Box 5400 Albuquerque, NM 87185 SEP 11 200t CERTIFIED MAIL - RESTRICTED DELIVERY - RETURN RECEIPT REQUESTED This is in final response to your Freedom oflnformation Act (FOIA) request dated January 26, 2007, for "a copy ofthe most recent two annualperformance reviews for Pantex Site, Kansas City Site, Sandia Site, Los Alamos Site, Y-12 Site and Livermore Site." I contacted the Site Offices who have oversight responsibility for the records you requested, and they are enclosed. -

FY 2006 Annual Performance Evaluation and Appraisal Lawrence Livermore National Laboratory (Rev
Description of document: FY 2006 Annual Performance Evaluation and Appraisal Lawrence Livermore National Laboratory (Rev. 1 January 19, 2007) Requested date: 26-January-2007 Released date: 11-September-2007 Posted date: 15-October-2007 Title of Document Fiscal Year 2006 Annual Performance Evaluation and Appraisal Lawrence Livermore National Laboratory Date/date range of document: FY 2006 Source of document: Department of Energy National Nuclear Security Administration Service Center P.O. Box 5400 Albuquerque, NM 87185 Freedom of Information Act U.S. Department of Energy 1000 Independence Ave., S.W. Washington, DC 20585 (202) 586-5955 [email protected] http://management.energy.gov/foia_pa.htm The governmentattic.org web site (“the site”) is noncommercial and free to the public. The site and materials made available on the site, such as this file, are for reference only. The governmentattic.org web site and its principals have made every effort to make this information as complete and as accurate as possible, however, there may be mistakes and omissions, both typographical and in content. The governmentattic.org web site and its principals shall have neither liability nor responsibility to any person or entity with respect to any loss or damage caused, or alleged to have been caused, directly or indirectly, by the information provided on the governmentattic.org web site or in this file. Department of Energy National Nuclear Security Administration Service Center P. O. Box 5400 Albuquerque, NM 87185 SEP 11 200t CERTIFIED MAIL - RESTRICTED DELIVERY - RETURN RECEIPT REQUESTED This is in final response to your Freedom oflnformation Act (FOIA) request dated January 26, 2007, for "a copy ofthe most recent two annualperformance reviews for Pantex Site, Kansas City Site, Sandia Site, Los Alamos Site, Y-12 Site and Livermore Site." I contacted the Site Offices who have oversight responsibility for the records you requested, and they are enclosed. -

Stewarding a Reduced Stockpile
LLNL-CONF-403041 Stewarding a Reduced Stockpile Bruce T. Goodwin, Glenn L. Mara April 24, 2008 AAAS Technical Issues Workshop Washington, DC, United States Disclaimer This document was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor Lawrence Livermore National Security, LLC, nor any of their employees makes any warranty, expressed or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or Lawrence Livermore National Security, LLC. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or Lawrence Livermore National Security, LLC, and shall not be used for advertising or product endorsement purposes. This work performed under the auspices of the U.S. Department of Energy by Lawrence Livermore National Laboratory under Contract DE-AC52-07NA27344. Stewarding a Reduced Stockpile Bruce T. Goodwin, Principal Associate Director Weapons and Complex Integration Lawrence Livermore National Laboratory Glenn Mara, Principal Associate Director for Weapons Programs Los Alamos National Laboratory The future of the US nuclear arsenal continues to be guided by two distinct drivers: the preservation of world peace and the prevention of further proliferation through our extended deterrent umbrella. Timely implementation of US nuclear policy decisions depends, in part, on the current state of stockpile weapons, their delivery systems, and the supporting infrastructure within the Department of Defense (DoD) and the Department of Energy’s National Nuclear Security Administration (NNSA). -

January/February 2005 University of California Science & Technology Review Lawrence Livermore National Laboratory P.O
January/February 2005 University of California Science & Technology Review Lawrence Livermore National Laboratory P.O. Box 808, L-664 Livermore, California 94551 National Nuclear Security Administration’s Lawrence Livermore National Laboratory Also in this issue: • Jobs for Russian Weapons Workers • New Facility for Today’s and Tomorrow’s Printed on recycled paper. Supercomputers • Extracting Marketable Minerals from Geothermal Fluids About the Cover Livermore scientists use powerful machines and codes for computer simulations that have changed the way science is done at the Laboratory. As the article beginning on p. 4 describes, computer simulations have become powerful tools for understanding and predicting the physical universe, from the interactions of individual atoms to the details of climate change. For example, Laboratory physicists have predicted a new melt curve of hydrogen, resulting in the possible existence of a novel superfluid. The cover illustrates the transition of hydrogen from a molecular solid (top) to a quantum liquid (bottom), with a “metallic sea” added in the background. Cover design: Amy Henke Amy design: Cover About the Review Lawrence Livermore National Laboratory is operated by the University of California for the Department of Energy’s National Nuclear Security Administration. At Livermore, we focus science and technology on ensuring our nation’s security. We also apply that expertise to solve other important national problems in energy, bioscience, and the environment. Science & Technology Review is published 10 times a year to communicate, to a broad audience, the Laboratory’s scientific and technological accomplishments in fulfilling its primary missions. The publication’s goal is to help readers understand these accomplishments and appreciate their value to the individual citizen, the nation, and the world. -

B UCRL-AR-143313-08 Lawrence Livermore National Laboratory
UCRL-AR-143313-08 B Lawrence Livermore National Laboratory UCRL-AR-143313-08 FY09 Ten Year Site Plan A UCRL-AR-143313-08 Acknowledgments Responsible Organization Publication Editor Contributing Authors Institutional Facilities Karen Kline Jacky Angell Dan Knight Management Art Director Mike Auble Bill Maciel Sharon Beall Matt Mlekush Responsible Manager Scott Dougherty Denise Robinson Jeff Brenner Al Moser Design and Production Dennis Chew Ray Pierce Publication Directors Scott Dougherty Ray Chin Paul Reynolds Carey Bailey Marleen Emig Paul Chrzanowski Larry Sedlacek Paul Chu Paul Chu Rich Shonfeld Publication Manager Shawne Ellerbee Mark Sueksdorf Marleen Emig Kent Johnson Doug Sweeney Paul Kempel Jesse Yow And a special thanks to the NNSA Livermore Site Office, LLNL Directorates, Programs, Area Facility Operations Managers, contributors, and reviewers. DISCLAIMER This document was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor Lawrence Livermore National Security, LLC, nor any of their employees makes any warranty, expressed or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or Lawrence Livermore National Security, LLC. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or Lawrence Livermore National Security, LLC, and shall not be used for advertising or product endorsement purposes. -
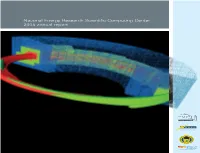
2004 NERSC Annual Report
9864_CR_cover 4/14/05 5:42 PM Page 99 NERSC 2004 annual report annual NERSC 2004 National Energy Research Scientific Computing Center 2004 annual report LBNL-57369 9864_CR_cover 4/14/05 5:42 PM Page 100 Published by the Berkeley Lab Creative Services Office in collaboration with NERSC researchers and staff. JO#9864 Editor and principal writer: John Hules Contributing writers: Jon Bashor, Lynn Yarris, Julie McCullough, Paul Preuss, Wes Bethel DISCLAIMER This document was prepared as an account of work sponsored by the United States Government. While this document is believed to con- tain correct information, neither the United States Government nor any agency thereof, nor The Regents of the University of California, nor any of their employees, makes any warranty, express or implied, or assumes any legal responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process dis- closed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by its trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommen- dation, or favoring by the United States Government or any agency thereof, or The Regents of the University of California. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof, or The Regents of the University of California. Cover image: Visualization based on a simulation of the density of a Ernest Orlando Lawrence Berkeley National Laboratory is an equal fuel pellet after it is injected into a tokamak fusion reactor. -

Green500 List
Making a Case for a Green500 List S. Sharma†, C. Hsu†, and W. Feng‡ † Los Alamos National Laboratory ‡ Virginia Tech Outline z Introduction What Is Performance? Motivation: The Need for a Green500 List z Challenges What Metric To Choose? Comparison of Available Metrics z TOP500 as Green500 z Conclusion W. Feng, [email protected], (540) 231-1192 Where Is Performance? Performance = Speed, as measured in FLOPS W. Feng, [email protected], (540) 231-1192 What Is Performance? TOP500 Supercomputer List z Benchmark LINPACK: Solves a (random) dense system of linear equations in double-precision (64 bits) arithmetic. Introduced by Prof. Jack Dongarra, U. Tennessee z Evaluation Metric Performance, as defined by Performance (i.e., Speed) speed, is an important metric, Floating-Operations Per Second (FLOPS) but… z Web Site http://www.top500.org z Next-Generation Benchmark: HPC Challenge http://icl.cs.utk.edu/hpcc/ W. Feng, [email protected], (540) 231-1192 Reliability & Availability of HPC Systems CPUs Reliability & Availability ASCI Q 8,192 MTBI: 6.5 hrs. 114 unplanned outages/month. HW outage sources: storage, CPU, memory. ASCI 8,192 MTBF: 5 hrs. (2001) and 40 hrs. (2003). White HW outage sources: storage, CPU, 3rd-party HW. NERSC 6,656 MTBI: 14 days. MTTR: 3.3 hrs. Seaborg SW is the main outage source. Availability: 98.74%. PSC 3,016 MTBI: 9.7 hrs. Lemieux Availability: 98.33%. Google ~15,000 20 reboots/day; 2-3% machines replaced/year. (as of 2003) HW outage sources: storage, memory. Availability: ~100%. MTBI: mean time between interrupts; MTBF: mean time between failures; MTTR: mean time to restore Source: Daniel A. -
Delivering Insight: the History of the Accelerated Strategic Computing
Lawrence Livermore National Laboratory Computation Directorate Dona L. Crawford Computation Associate Director Lawrence Livermore National Laboratory 7000 East Avenue, L-559 Livermore, CA 94550 September 14, 2009 Dear Colleague: Several years ago, I commissioned Alex R. Larzelere II to research and write a history of the U.S. Department of Energy’s Accelerated Strategic Computing Initiative (ASCI) and its evolution into the Advanced Simulation and Computing (ASC) Program. The goal was to document the first 10 years of ASCI: how this integrated and sustained collaborative effort reached its goals, became a base program, and changed the face of high-performance computing in a way that independent, individually funded R&D projects for applications, facilities, infrastructure, and software development never could have achieved. Mr. Larzelere has combined the documented record with first-hand recollections of prominent leaders into a highly readable, 200-page account of the history of ASCI. The manuscript is a testament to thousands of hours of research and writing and the contributions of dozens of people. It represents, most fittingly, a collaborative effort many years in the making. I’m pleased to announce that Delivering Insight: The History of the Accelerated Strategic Computing Initiative (ASCI) has been approved for unlimited distribution and is available online at https://asc.llnl.gov/asc_history/. Sincerely, Dona L. Crawford Computation Associate Director Lawrence Livermore National Laboratory An Equal Opportunity Employer • University of California • P.O. Box 808 Livermore, California94550 • Telephone (925) 422-2449 • Fax (925) 423-1466 Delivering Insight The History of the Accelerated Strategic Computing Initiative (ASCI) Prepared by: Alex R. -

LLNL 65 Th Anniversary Book, 2017
Scientific Editor Paul Chrzanowski Production Editor Arnie Heller Pamela MacGregor (first edition) Graphic Designer George Kitrinos Proofreader Caryn Meissner About the Cover Since its inception in 1952, the Laboratory has transformed from a deactivated U.S. Naval Air Station to a campus-like setting (top) with outstanding research facilities through U.S. government investments in our important missions and the efforts of generations of exceptional people dedicated to national service. This document was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor Lawrence Livermore National Security, LLC, About the Laboratory nor any of their employees makes any warranty, expressed or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or Lawrence Livermore National Laboratory (LLNL) was founded in 1952 to enhance process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to the security of the United States by advancing nuclear weapons science and any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise technology and ensuring a safe, secure, and effective nuclear deterrent. With does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States a talented and dedicated workforce and world-class research capabilities, the government or Lawrence Livermore National Security, LLC. The views and opinions of authors expressed Laboratory strengthens national security with a tradition of science and technology herein do not necessarily state or reflect those of the United States government or Lawrence Livermore National Security, LLC, and shall not be used for advertising or product endorsement purposes. -
05Bb-Final.Pdf
About the National Science and Technology Council The National Science and Technology Council (NSTC) was established by Executive Order on November 23, 1993. This Cabinet-level council is the principal means by which the President coordinates science, space, and technology policies across the Federal government. NSTC coordinates the diverse parts of the Federal research and development enterprise. An important objective of the NSTC is the establishment of clear national goals for Federal science and technology investments in areas ranging from information technologies and health research to improving transportation systems and strengthening fundamental research. The Council prepares research and development strategies that are coordinated across Federal agencies to form a comprehensive investment package that is aimed at accomplishing multiple national goals. The NSTC Web site is: www.nstc.gov. To obtain additional information regarding the NSTC, please contact the NSTC Executive Secretariat at (202) 456-6100. About the Office of Science and Technology Policy The Office of Science and Technology Policy (OSTP) was established by the National Science and Technology Policy, Organization, and Priorities Act of 1976. OSTP’s responsibilities include advising the President in policy formulation and budget development on all questions in which science and technology are important elements; articulating the President's science and technology policies and programs; and fostering strong partnerships among Federal, state, and local governments, and the scientific communities in industry and academe. The Assistant to the President for Science and Technology serves as the Director of the OSTP and directs the NSTC on behalf of the President. The OSTP Web site is: www.ostp.gov. -

FY 2008 Volume 1
DOE/CF-014 Volume 1 Department of Energy FY 2008 Congressional Budget Request National Nuclear Security Administration Office of the Administrator Weapons Activities Defense Nuclear Nonproliferation Naval Reactors February 2007 Volume 1 Office of Chief Financial Officer DOE/CF-014 Volume 1 Department of Energy FY 2008 Congressional Budget Request National Nuclear Security Administration Office of the Administrator Weapons Activities Defense Nuclear Nonproliferation Naval Reactors February 2007 Volume 1 Office of Chief Financial Officer Printed with soy ink on recycled paper Office of the Administrator Weapons Activities Defense Nuclear Nonproliferation Naval Reactors Office of the Administrator Weapons Activities Defense Nuclear Nonproliferation Naval Reactors Volume 1 Table of Contents Page Appropriation Account Summary.............................................................................................................3 Strategic Overview....................................................................................................................................5 NNSA Overview.......................................................................................................................................7 Office of the Administrator.....................................................................................................................31 Weapons Activities .................................................................................................................................53 Defense Nuclear Nonproliferation........................................................................................................413