Missing MRI Pulse Sequence Synthesis Using Multi-Modal Generative Adversarial Network Anmol Sharma, Student Member, IEEE, Ghassan Hamarneh, Senior Member, IEEE
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Evaluation of Aqueductal Stenosis by 3D
Published December 15, 2011 as 10.3174/ajnr.A2833 Evaluation of Aqueductal Stenosis by 3D Sampling Perfection with Application-Optimized Contrasts Using Different Flip Angle Evolutions Sequence: Preliminary Results with 3T MR ORIGINAL RESEARCH Imaging O. Algin BACKGROUND AND PURPOSE: Diagnosis of AS and periaqueductal abnormalities by routine MR imag- B. Turkbey ing sequences is challenging for neuroradiologists. The aim of our study was to evaluate the utility of the 3D-SPACE sequence with VFAM in patients with suspected AS. MATERIALS AND METHODS: PC-MRI and 3D-SPACE images were obtained in 21 patients who had hydrocephalus on routine MR imaging scans and had clinical suspicion of AS, as well as in 12 control subjects. Aqueductal patency was visually scored (grade 0, normal; grade 1, partial obstruction; grade 2, complete stenosis) by 2 experienced radiologists on PC-MRI (plus routine T1-weighted and T2- weighted images) and 3D-SPACE images. Two separate scores were statistically compared with each other as well as with the consensus scores obtained from general agreement of both radiologists. RESULTS: There was an excellent correlation between 3D-SPACE and PC-MRI scores ( ϭ 0.828). The correlation between 3D-SPACE scorings and consensus-based scorings was higher compared with the correlation between PC-MRI and consensus-based scorings (r ϭ 1, P Ͻ .001 and r ϭ 0.966, P Ͻ .001, respectively). CONCLUSIONS: 3D-SPACE sequence with VFAM alone can be used for adequate and successful evaluation of the aqueductal patency without the need for additional sequences and examinations. Noninvasive evaluation of the whole cranium is possible in a short time with high resolution by using 3D-SPACE. -
Unprecedented Echo Times for Diffusion MRI Using Connectom Gradients, Spiral Readouts and Field Monitoring
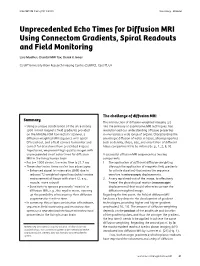
MAGNETOM Flash (74) 3/2019 Neurology · Clinical Unprecedented Echo Times for Diffusion MRI Using Connectom Gradients, Spiral Readouts and Field Monitoring Lars Mueller; Chantal MW Tax; Derek K Jones Cardiff University Brain Research Imaging Centre (CUBRIC), Cardiff, UK The challenge of diffusion MRI Summary The introduction of diffusion-weighted imaging [3] • Using a unique combination of the ultra-strong into the armoury of quantitative MRI techniques, has (300 mT/m) magnetic field gradients provided revolutionised our understanding of tissue properties on the MAGNETOM Connectom1 scanner, a in vivo across a wide range of organs. Characterizing the diffusion-weighted MRI sequence with spiral anisotropic diffusion of water in tissue, allows properties EPI read-out, and a field camera to monitor and such as density, shape, size, and orientation of different correct for deviations from prescribed k-space tissue compartments to be inferred [e.g., 1, 2, 6, 9]. trajectories, we present high quality images with unprecedented short echo times for diffusion A successful diffusion MRI sequence has two key MRI in the living human brain components: • For b = 1000 s/mm2, the echo time is 21.7 ms 1. The application of sufficient diffusion-weighting • These short echo times confer two advantages: (through the application of magnetic field gradients • Enhanced signal to noise ratio (SNR) due to for a finite duration) that makes the sequence reduced T2-weighted signal loss (which makes sensitive to microscopic displacements. measurement of tissue with short T2, e.g., 2. A very rapid read-out of the image, to effectively muscle, more robust) ‘freeze’ the physiological motion (macroscopic • Sensitivity to species previously ‘invisible’ in displacements) that would otherwise corrupt the diffusion MRI, e.g., the myelin water, opening diffusion-weighted image. -

A Simulation Study Investigating Potential Diffusion-Based MRI Signatures of Microstrokes
bioRxiv preprint doi: https://doi.org/10.1101/2020.08.19.257741; this version posted August 20, 2020. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY-NC-ND 4.0 International license. A Simulation Study Investigating Potential Diffusion-based MRI Signatures of Microstrokes Rafat Damseh1,2*, Yuankang Lu1,2, Xuecong Lu1,2, Cong Zhang2,3, Paul J. Marchand1,2, Denis Corbin1, Philippe Pouliot1,2, Farida Cheriet4, and Frederic Lesage1,2 1Laboratory of Optical and Molecular Imaging, Ecole´ Polytechnique de Montreal,´ 2900 Edouard Montpetit Blvd, Montreal´ (Quebec),´ Canada, H3T 1J4 2Montreal Heart Institute, 5000 Rue Belanger,´ Montreal´ (Quebec),´ Canada, H1T 1C8 3Universite´ de Montreal, 2900 Edouard Montpetit Blvd, Montreal´ (Quebec),´ Canada, H3T 1J4 4Department of Computer and Software Engineering, Ecole´ Polytechnique de Montreal,´ 2900 Edouard Montpetit Blvd, Montreal´ (Quebec),´ Canada, H3T 1J4 *[email protected] ABSTRACT Recent studies suggested that cerebrovascular micro-occlusions , i.e. microstokes, could lead to ischemic tissue infarctions and cognitive deficits. Due to their small size, identifying measurable biomarkers of these microvascular lesions remains a major challenge. This work aims to simulate potential MRI signatures combining arterial spin labeling (ASL) and multi-directional diffusion-weighted imaging (DWI). Driving our hypothesis are recent observations demonstrating a radial reorientation of microvasculature around the micro-infarction locus during recovery in mice. Synthetic capillary beds, randomly- and radially- oriented, and optical coherence tomography (OCT) angiograms, acquired in the barrel cortex of mice (n=5) before and after inducing targeted photothrombosis, were analyzed. -

MRI-Derived Measurements of Human Subcortical, Ventricular
NeuroImage 46 (2009) 177–192 Contents lists available at ScienceDirect NeuroImage journal homepage: www.elsevier.com/locate/ynimg MRI-derived measurements of human subcortical, ventricular and intracranial brain volumes: Reliability effects of scan sessions, acquisition sequences, data analyses, scanner upgrade, scanner vendors and field strengths Jorge Jovicich a,⁎, Silvester Czanner b, Xiao Han c, David Salat d,e, Andre van der Kouwe d,e, Brian Quinn d,e, Jenni Pacheco d,e, Marilyn Albert h, Ronald Killiany i, Deborah Blacker g, Paul Maguire j, Diana Rosas d,e,f, Nikos Makris d,e,k, Randy Gollub d,e, Anders Dale l, Bradford C. Dickerson d,f,g,m,1, Bruce Fischl d,e,n,1 a Center for Mind–Brain Sciences, Department of Cognitive and Education Sciences, University of Trento, Italy b Warwick Manufacturing Group, School of Engineering, University of Warwick, UK c CMS, Inc., St. Louis, MO, USA d Athinoula A. Martinos Center for Biomedical Imaging, USA e Department of Radiology, Massachusetts General Hospital and Harvard Medical School, Boston, MA, USA f Department of Neurology, Massachusetts General Hospital and Harvard Medical School, Boston, MA, USA g Gerontology Research Unit, Department of Psychiatry, Massachusetts General Hospital and Harvard Medical School, Boston, MA, USA h Department of Neurology, Johns Hopkins University School of Medicine, USA i Department of Anatomy and Neurobiology, Boston University School of Medicine, USA j Pfizer Global Research and Development, Groton, CT, USA k Center for Morphometric Analysis, Massachusetts General Hospital, Boston, MA, USA l University of California San Diego, CA, USA m Division of Cognitive and Behavioral Neurology, Department of Neurology, Brigham and Women's Hospital, Boston, MA, USA n CSAIL/HST, MIT, Cambridge, MA, USA article info abstract Article history: Automated MRI-derived measurements of in-vivo human brain volumes provide novel insights into normal Received 19 August 2008 and abnormal neuroanatomy, but little is known about measurement reliability. -

Black Bone” Sequence to a Fast Multisequence Trauma MR Protocol Allow MRI to Replace CT After Traumatic Brain Injury in Children?
ORIGINAL RESEARCH PEDIATRICS Does the Addition of a “Black Bone” Sequence to a Fast Multisequence Trauma MR Protocol Allow MRI to Replace CT after Traumatic Brain Injury in Children? X M.H.G. Dremmen, X M.W. Wagner, X T. Bosemani, X A. Tekes, X D. Agostino, X E. Day, X B.P. Soares, and X T.A.G.M. Huisman ABSTRACT BACKGROUND AND PURPOSE: Head CT is the current neuroimaging tool of choice in acute evaluation of pediatric head trauma. The potential cancer risks of CT-related ionizing radiation should limit its use in children. We evaluated the role of MR imaging, including a “black bone” sequence, compared with CT in detecting skull fractures and intracranial hemorrhages in children with acute head trauma. MATERIALS AND METHODS: We performed a retrospective evaluation of 2D head CT and brain MR imaging studies including the black bone sequence of children with head trauma. Two experienced pediatric neuroradiologists in consensus created the standard of refer- ence. Another pediatric neuroradiologist blinded to the diagnosis evaluated brain MR images and head CT images in 2 separate sessions. The presence of skull fractures and intracranial posttraumatic hemorrhages was evaluated. We calculated the sensitivity and specificity of CT and MR imaging with the black bone sequence in the diagnosis of skull fractures and intracranial hemorrhages. RESULTS: Twenty-eight children (24 boys; mean age, 4.89 years; range, 0–15.5 years) with head trauma were included. MR imaging with the black bone sequence revealed lower sensitivity (66.7% versus 100%) and specificity (87.5% versus 100%) in identifying skull fractures. -
The Appropriate Use of Neuroimaging in the Diagnostic Work-Up of Dementia: an Evidence-Based Analysis
The Appropriate Use of Neuroimaging in the Diagnostic Work-Up of Dementia: An Evidence-Based Analysis Health Quality Ontario February 2014 Ontario Health Technology Assessment Series; Vol. 14: No. 1, pp. 1–64, February 2014 Suggested Citation This report should be cited as follows: Health Quality Ontario. The appropriate use of neuroimaging in the diagnostic work-up of dementia: an evidence- based analysis. Ont Health Technol Assess Ser [Internet]. 2014 February;14(1):1–64. Available from: http://www.hqontario.ca/evidence/publications-and-ohtac-recommendations/ontario-health-technology-assessment- series/imaging-for-dementia. Permission Requests All inquiries regarding permission to reproduce any content in the Ontario Health Technology Assessment Series should be directed to: [email protected]. How to Obtain Issues in the Ontario Health Technology Assessment Series All reports in the Ontario Health Technology Assessment Series are freely available in PDF format at the following URL: http://www.hqontario.ca/evidence/publications-and-ohtac-recommendations/ontario-health-technology- assessment-series. Indexing The Ontario Health Technology Assessment Series is currently indexed in MEDLINE/PubMed, Excerpta Medica/Embase, and the Centre for Reviews and Dissemination database. Conflict of Interest Statement All authors in the Ontario Health Technology Assessment Series are impartial. There are no competing interests or conflicts of interest to declare. Peer Review All reports in the Ontario Health Technology Assessment Series are subject to external expert peer review. Additionally, Health Quality Ontario posts draft reports and recommendations on its website for public comment prior to publication. For more information, please visit: http://www.hqontario.ca/en/mas/ohtac_public_engage_overview.html. -

Diagnosis of Meningitis Caused by Pathogenic Microorganisms Using Magnetic Resonance Imaging: a Systematic Review.Basic and Clinical Neuro- Science, 9(2), 73-86
Basic and Clinical March, April 2018, Volume 9, Number 2 Review Paper: Diagnosis of Meningitis Caused by Pathogen- ic Microorganisms Using Magnetic Resonance Imaging: A Systematic Review Alia Saberi1, Seyed-Ali Roudbary2, Amirreza Ghayeghran2, Samaneh Kazemi3* , Mozaffar Hosseininezhad2 1. Neurosciences Research Center, Department of Neurology, Pouursina Hospital, School of Medicine, Guilan University of Medical Sciences, Rasht, Iran. 2. Department of Neurology, Poursina Hospital, School of Medicine, Guilan University of Medical Sciences, Rasht, Iran. 3. Deputy of Research and Technology, Guilan University of Medical Sciences, Rasht, Iran. Use your device to scan and read the article online Citation: Saberi, A., Roudbary, S. A., Ghayeghran, A., Kazemi, S., & Hosseininezhad, M. (2018). Diagnosis of Meningitis Caused by Pathogenic Microorganisms Using Magnetic Resonance Imaging: A Systematic Review.Basic and Clinical Neuro- science, 9(2), 73-86. https://doi.org/10.29252/nirp.bcn.9.2.73 : https://doi.org/10.29252/nirp.bcn.9.2.73 Article info: A B S T R A C T Received: 02 September 2017 First Revision: 27 September 2017 Introduction: Bacterial meningitis is an acute infectious inflammation of the protective Accepted: 10 November 2017 membranes covering the brain. Its early diagnosis is vital because of its high morbidity and mortality. It is mostly diagnosed by a gold standard diagnostic tool i.e. Cerebrospinal Fluid (CSF) analysis. However, it is sometimes difficult and or impossible to do this procedure and an alternative diagnostic tool is needed. Contrast enhanced magnetic resonance imaging can detect the pus or other changes in subarachnoid space. But our optimal aim is to use an imaging method without using contrast to be useable and available in more specific condition. -

MRI (1.5 and 3 Tesla) Sequence Optimization for Use in Orthopaedics
Instituto Politécnico de Coimbra Escola Superior de Tecnologia da Saúde Coimbra MRI (1.5 and 3 Tesla) sequence optimization for use in Orthopaedics Cláudio Pereira Mestrado em Ciências Nucleares Aplicadas na Saúde 2016 Instituto Politécnico de Coimbra Escola Superior de Tecnologia da Saúde Coimbra Mestrado em Ciências Nucleares Aplicadas na Saúde Dissertação MRI (1.5 and 3 Tesla) sequence optimization for use in Orthopaedics Cláudio Pereira Orientador: Professor Doutor Francisco Alves Coimbra, Dezembro, 2016 Information about the Author: Cláudio Leonel Duarte Pereira Bachelor of Radiography at Aveiro University, Portugal Master´s Student in Nuclear Sciences Applied in Health at College of Health Technologies of Coimbra, Portugal Senior MRI Radiographer at Nuffield Orthopaedic Centre, Oxford University Hospital NHS Trust, UK Contact: 1. [email protected] 2. [email protected] 3. +44 (0)7925366332 Author’s note: Dedicated to whoever reads more than 50% of this work. I would happily read 5 pages of this work for every page that I didn’t had to write. Master in Nuclear Sciences Applied in Health December 2016 Associated Published Scientific Works Published Presentations & Posters related to the following dissertation 1. Pereira C, Partington K. “Reducing metal artefacts in MRI: a retrospective analysis of improved diagnostic quality and reporting confidence without the use of specialized commercial pulses/techniques”. Ed: ECR of. In. Vienna, Austria: European Society of Radiology; 2016. 2. Pereira C, Partington K. “Fast scans and better images at Zero cost in Clinical MRI”. Ed: ESMRMB Congress. In. Edinburgh, Scotland: European Society of Magnetic Resonance in Medicine and Biology; 2015. Cláudio Leonel Duarte Pereira iii Master in Nuclear Sciences Applied in Health December 2016 Index Index PUBLISHED PRESENTATIONS & POSTERS RELATED TO THE FOLLOWING DISSERTATION ......................................... -

Hyperechoes Weigel.Pdf
Magnetic Resonance in Medicine 55:826–835 (2006) Contrast Behavior and Relaxation Effects of Conventional and Hyperecho-Turbo Spin Echo Sequences at 1.5 and 3 T1 Matthias Weigel* and Juergen Hennig To overcome specific absorption rate (SAR) limitations of spin- advantages such as limited volume coverage, longer acqui- echo-based MR imaging techniques, especially at (ultra) high sition times, and a less well defined slice profile emerge. fields, rapid acquisition relaxation enhancement/TSE (turbo These limitations are not acceptable for most clinical ap- spin echo)/fast spin echo sequences in combination with con- plications. More promising solutions are a shorter ETL via stant or variable low flip angles such as hyperechoes and partially parallel acquisition (PPA) techniques such as TRAPS (hyperTSE) have been introduced. Due to the multiple GRAPPA, SMASH, and SENSE (3,4) or partial Fourier spin echo and stimulated echo pathways involved in the signal formation, the contrast behavior of such sequences depends reconstruction methods (5,6). Since SARϳRFPϳ␣ 2 the use of refocusing flip angles on both T2 and T1 relaxation times. In this work, constant and ref various variable flip angle sequences were analyzed in a volun- lower than 180° reduces RFP very efficiently (7). However, teer study. It is demonstrated that a single effective echo time a reduction of the (constant) refocusing flip angle leads to parameter TEeff can be calculated that accurately describes the a diminished signal-to-noise ratio (SNR) and also to subtle overall T2 weighted image contrast. TEeff can be determined by changes of contrast due to stimulated echo contributions means of the extended phase graph concept and is practically that are usually ignored. -

The Role of Double Inversion Recovery Imaging in Acute Ischemic Stroke
pISSN 2384-1095 iMRI 2019;23:210-219 https://doi.org/10.13104/imri.2019.23.3.210 eISSN 2384-1109 The Role of Double Inversion Recovery Imaging in Acute Ischemic Stroke Na Young Choi, Soonchan Park, Chung Min Lee, Chang-Woo Ryu, Geon-Ho Jahng Department of Radiology, Kyung Hee University Hospital at Gangdong, College of Medicine, Kyung Hee University, Seoul, Korea Magnetic resonance imaging Purpose: The purpose of this study was to investigate if double inversion recovery (DIR) imaging can have a role in the evaluation of brain ischemia, compared with diffusion-weighted imaging (DWI) and fluid-attenuated inversion recovery (FLAIR) imaging. Original Article Materials and Methods: Sixty-seven patients within 48 hours of onset, underwent MRI scans with FLAIR, DWI with b-value of 0 (B0) and 1000 s/mm2, and DIR sequences. Patients were categorized into four groups: within three hours, three to six hours, six to 24 hours, and 24 to 48 hours after onset. Lesion-to-normal ratio (LNR) Received: March 4, 2019 value was calculated and compared among all sequences within each group, by the Revised: May 24, 2019 Friedman test and conducted among all groups, for each sequence by the Kruskal- Accepted: June 10, 2019 Wallis test. In qualitative assessment, signal intensity changes of DIR, B0, and FLAIR Correspondence to: based on similarity with DWI and image quality of each sequence, were graded on a Geon-Ho Jahng, Ph.D. 3-point scale, respectively. Scores for detectability of lesions were compared by the Department of Radiology, Kyung McNemar’s test. Hee University Hospital at Results: LNR values from DWI were higher than DIR, but not statistically significant Gangdong, College of Medicine, Kyung Hee University, #892 in all groups (P > 0.05). -

MR-PET (Positron Emission Tomography)
A WORLD OF KNOWLEDGE SMRT FOR MR TECHNOLOGISTS & RADIOGRAPHERS SECTION FOR MAGNETIC RESONANCE TECHNOLOGISTS OF THE INTERNATIONAL SOCIETY FOR MAGNETIC RESONANCE IN MEDICINE SMRT Home Study Educational Seminars VOLUME 18 • NUMBER 2 MR-PET (Positron Emission Tomography) Integrated PET/MR Harald H. Quick, Ph,D. Whole-Body Simultaneous Positron Emission Tomography (PET)-MR: Optimization and Adaptation of MRI Sequences Kathryn J. Fowler, M.D. Jon McConathy, M.D., Ph.D. Vamsi R. Narra, M.D.. Initial Experience of MR/PET in a Clinical Cancer Center Sasan Partovi, M.D. Mark R. Robbin, M.D. Oliver C. Steinbach, Ph.D. Andres Kohan, M.D. Christian Rubbert, M.D. Expert Reviewer: Jose L. Vercher-Conejero, M.D. Julia Lowe, B.S.,R.T.(R)(MR) FSMRT Jeffrey A. Kolthammer, Ph.D. SMRT Educational Seminars Editor: Peter Faulhaber, M.D. Anne Marie Sawyer, B.S., R.T.(R)(MR), FSMRT Raj Mohan Paspulati, M.D. Pablo R. Ros, M.D., MPH, Ph.D. Chair, SMRT Publications Committee: Vanessa Orchard, DCR(D), PGDip.(NucMed), M.Sc.(MRI) A Message from the SMRT Home Study Educational Seminars Publications Committee Editor, SMRT Educational Seminars, Home Study Program Chair, SMRT Publications Committee Vanessa Orchard, DCR(D), PGDip.(Nuc Med), Anne Marie Sawyer, B.S., R.T.(R)(MR), FSMRT M.Sc.(MRI) Home Study Program Lead Radiographer Lucas Center for Imaging Cardiac Imaging Centre Stanford University, Stanford, California, USA Golden Jubilee National Hospital T: +1 650 725 9697 Dunbartonshire, Glasgow, Scotland, UK E: [email protected] T: +0141 951 5187 E: [email protected] MR-PET (Positron Emission Tomography) March 2015 We are pleased to present the SMRT Home Study Educational Semi- imaging systems. -

MRI and MRS of the Human Brain at Magnetic Fields of 14 T to 20 T
NeuroImage 168 (2018) 509–531 Contents lists available at ScienceDirect NeuroImage journal homepage: www.elsevier.com/locate/neuroimage fi MRI and MRS of the human brain at magnetic elds of 14 T to 20 T: MARK Technical feasibility, safety, and neuroscience horizons ⁎ Thomas F. Budingera, , Mark D. Birdb a University of California, Berkeley, Lawrence Berkeley National Laboratory, Berkeley, CA, United States b National High Magnetic Field laboratory, Florida State University, Tallahassee, FL, United States ABSTRACT The three goals of this paper are: 1) to evaluate the improvements in technology for increasing magnetic flux density (magnetic field) to 14 T in the next few years and eventually to 20 T; 2) to highlight neuroscience opportunities enabled by these advances; and, 3) to evaluate the physiological and biophysical effects associated with MRI at very high performance levels. Substantial recent advances in magnet technology including superconductor developments enable neuroscience goals that are not obtainable at contemporary magnetic fields. Ten areas of brain neuroscience include potential improvements in resolution for functional MRI(BOLD), diffusion weighted MRI, tractography, susceptibility weighted MR, neuronal architecture patterns related to human behavior, proton spectroscopy of small brain biochemicals, chemical exchange saturation transfer (CEST), dynamic contrast enhanced MRI, brain energy metabolism using 13C, 17O, and 31P; and brain electrolyte physiology using 23Na, 35Cl, and 39K. Physiological phenomena and safety aspects include: absorbed RF power, acoustic sound pressure levels, induced electric fields, Lorentz forces, magnetohydrodynamic forces, and biophysical phenomena in cells and tissues. Where feasible, effects are quantified for magnetic fields beyond 7 T with the conclusion that there are no foreseen barriers either in the technical or human safety aspects of brain MRI and MRS at fields up to 20 T.