Range and Endurance Modeling of a Multi- Engine Aircraft with One Engine Inoperative (OEI)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Control and Performance During Asymmetrical Powered Flight
Control and Performance During Asymmetrical Powered Flight Detailed theoretical paper in accordance with the JAA Learning Objectives, US Federal Aviation Regulations and EASA Certification Specifications for Multi-engine Rated Pilots CPL & ATPL Based on Airplane Design Methods as taught by Aeronautical Universities and Flight Test Techniques as taught by Experimental Test Pilot Schools January 2012 Harry Horlings Lt-Col RNLAF, ret'd Graduate USAF Test Pilot School AvioConsult Independent Aircraft Expert and Consultant – Committed to Improve Aviation Safety – Copyright © 2012, AvioConsult. All rights reserved. AvioConsult Control and Performance During Asymmetrical Powered Flight The author is a retired Lt-Col of the Royal Netherlands Air Force, graduate Flight Test Engineer of the USAF Test Pilot School, Edwards Air Force Base, California, USA (Dec. 1985) and experienced private pilot. Following a career of 15 years in (experimental) flight-testing, of which the last 5 years as chief experimental flight-test, he founded AvioConsult and dedicated himself to improving the safety of aviation using his knowledge of experimental flight-testing. Copyright © 2012, AvioConsult. All rights reserved. The copyright of this paper belongs to and remains with AvioConsult unless specifically stated otherwise. By accepting this paper, the recipient agrees that neither this paper nor the information disclosed herein nor any part thereof shall be reproduced or transferred to other documents or used by or disclosed to others for any purpose except as specifically authorized in writing by AvioConsult. AvioConsult has written this paper in good faith, but no representation is made or guarantee given (either express or implied) as to the completeness of the information it contains. -
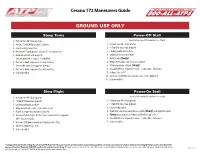
Cessna 172 Maneuvers Guide Private Single-Engine, Commercial Single-Engine, and CFI Single-Engine
Cessna 172 Maneuvers Guide Private Single-Engine, Commercial Single-Engine, and CFI Single-Engine GROUND USE ONLY Steep Turns Power-Off Stall 1. Perform two 90º clearing turns See Policies and Procedures — Stalls 2. 90 KIAS (*2000 RPM) maintain altitude 1. Perform two 90° clearing turns 3. Cruise configuration flow 2. *1500 RPM (maintain altitude) 4. Roll into 45˚ bank (private, at least 50˚ for commercial) 3. Landing configuration flow 5. Maintain altitude and airspeed 4. Stabilized descent at 65 KIAS (+ back pressure, + approx. 1-200 RPM) 5. Throttle idle (Slowly) 6. Roll out ½ bank angle prior to entry heading 6. Wings level or up to 20° bank as assigned 7. Clear traffic and roll in opposite direction 7. Pitch to maintain altitude (Slowly) 8. Roll out ½ bank angle prior to entry heading 8. At stall/buffet (as required) recover – reduce AOA - full power 9. Cruise checklist 9. Reduce flaps to 10° 10. Accelerate to 60 KIAS (VX), positive rate, reduce flaps to 0° 11. Cruise checklist Slow Flight Power-On Stall 1. Perform two 90º clearing turns See Policies and Procedures — Stalls 2. *1500 RPM (maintain altitude) 1. Perform two 90° clearing turns 3. Landing configuration flow 2. *1500 RPM (maintain altitude) 4. Maintain altitude - slow to just above a stall 3. Clean configuration 5. Power as required to maintain airspeed 4. At 60 KIAS, simultaneously increase pitch (Slowly) and apply full power 6. Accomplish level flight, climbs, turns, and descents as required 5. Slowly increase pitch to induce stall/buffet (approx 15°) (ATP - max 30° bank) 6. At stall/buffet (as required) recover – reduce AOA - full power 7. -

FAA-H-8083-3A, Airplane Flying Handbook -- 3 of 7 Files
Ch 04.qxd 5/7/04 6:46 AM Page 4-1 NTRODUCTION Maneuvering during slow flight should be performed I using both instrument indications and outside visual The maintenance of lift and control of an airplane in reference. Slow flight should be practiced from straight flight requires a certain minimum airspeed. This glides, straight-and-level flight, and from medium critical airspeed depends on certain factors, such as banked gliding and level flight turns. Slow flight at gross weight, load factors, and existing density altitude. approach speeds should include slowing the airplane The minimum speed below which further controlled smoothly and promptly from cruising to approach flight is impossible is called the stalling speed. An speeds without changes in altitude or heading, and important feature of pilot training is the development determining and using appropriate power and trim of the ability to estimate the margin of safety above the settings. Slow flight at approach speed should also stalling speed. Also, the ability to determine the include configuration changes, such as landing gear characteristic responses of any airplane at different and flaps, while maintaining heading and altitude. airspeeds is of great importance to the pilot. The student pilot, therefore, must develop this awareness in FLIGHT AT MINIMUM CONTROLLABLE order to safely avoid stalls and to operate an airplane AIRSPEED This maneuver demonstrates the flight characteristics correctly and safely at slow airspeeds. and degree of controllability of the airplane at its minimum flying speed. By definition, the term “flight SLOW FLIGHT at minimum controllable airspeed” means a speed at Slow flight could be thought of, by some, as a speed which any further increase in angle of attack or load that is less than cruise. -

Incorporation of Physics-Based Controllability Analysis in Aircraft
INCORPORATION OF PHYSICS-BASED CONTROLLABILITY ANALYSIS IN AIRCRAFT MULTI-FIDELITY MADO FRAMEWORK Dissertation Submitted to The School of Engineering of the UNIVERSITY OF DAYTON In Partial Fulfillment of the Requirements for The Degree of Doctor of Philosophy in Engineering By Christopher Meckstroth, M.S. Dayton, Ohio December 2019 INCORPORATION OF PHYSICS-BASED CONTROLLABILITY ANALYSIS IN AIRCRAFT MULTI-FIDELITY MADO FRAMEWORK Name: Meckstroth, Christopher Michael APPROVED BY: _________________________________ ________________________________ Raúl Ordóñez, Ph.D. Raymond Kolonay, Ph.D. Advisory Committee Chairman Committee Member Associate Professor Director Electrical and Computer Engineering Multidisciplinary Science and University of Dayton Technology Center AFRL/RQVC _________________________________ ________________________________ Eric Balster, Ph.D. Keigo Hirakawa, Ph.D. Committee Member Committee Member Associate Professor Associate Professor Electrical and Computer Engineering Electrical and Computer Engineering University of Dayton University of Dayton _________________________________ ________________________________ Robert J. Wilkens, Ph.D., P.E. Eddy M. Rojas, Ph.D., M.A., P.E. Associate Dean for Research and Innovation Dean, School of Engineering Professor School of Engineering ii ABSTRACT INCORPORATION OF PHYSICS-BASED CONTROLLABILITY ANALYSIS IN AIRCRAFT MULTI-FIDELITY MADO FRAMEWORK Name: Meckstroth, Christopher Michael University of Dayton Advisor: Dr. Raúl Ordóñez A method is presented to incorporate physics-based controllability -

ACTIVE CONTROL TRANSPORT DESIGN CRITERIA Bertrand M
ACTIVE CONTROL TRANSPORT DESIGN CRITERIA Bertrand M . Hall McDonnell Douglas Astronautics Company and Robert B. Harris Douglas Aircraft Company INTRODUCTION The question of design criteria for active control transports is one of the key issues involved in the design. The reason for this is that if one is to realize benefits in the form of increased range, decreased weight, etc., he must be able to apply design criteria which take into consideration the design improvements afforded by active controls. The work presented in this paper draws heavily from the report of an industry panel sponsored by NASA in 1972-73 to study vehicle design considerations for active control applications to subsonic transports. This work is soon to be published in a NASA document, reference 1. Additional background material has been drawn from references 2 through 16, which are not cited individually. In this paper today we will define what is meant by active control and then define those functions wiiich were considered by this panel and should be considered in any detailed study of design criteria. Fie will also touch briefly on the FAA regulations governing transport aircraft design. ACTIVE CONTROL TECHNOLOGY '4 The question of just what kind of an airplane configuration satisfies the definition of an active control aircraft is difficult. Several designations for this type of aircraft have been used (fly by wire, CCV, etc.) but an air- craft utilizing active controls can, in general, be identified as one in which significant inputs (over and above those of the pilot) are transmitted to the control surfaces for the purpose of augmenting vehicle performance. -
The a Graduate Team Aircraft Design Stanford University
The A Graduate Team Aircraft Design June 1, 1999 Stanford University The Cardinal: A 1999 AIAA Graduate Team Aircraft Design TH E St a n f o r d Un iv er s it y A 1999 AIAA GRADUATE TEAM AIRCRAFT PROPOSAL PROJECT LEADER: Patrick LeGresley Jose Daniel Cornejo AIAA Member Number 144155 AIAA Member Number 143144 MS Expected June 1999 MS Expected March 2000 [email protected] [email protected] Teal Bathke Jennifer Owens AIAA Member Number 183891 AIAA Member Number 113704 MS Expected June 2000 MS Expected December 1999 [email protected] [email protected] Angel Carrion Ryan Vartanian AIAA Member Number 183513 AIAA Member Number 154990 MS Expected March 2000 MS Expected June 1999 [email protected] [email protected] ADVISORS: Dr. Juan Alonso Dr. Ilan Kroo Assistant Professor Professor Stanford University Aeronautics & Astronautics Stanford University Aeronautics & Astronautics [email protected] [email protected] “When I was a student in college, just flying an airplane seemed a dream…” ~Charles Lindbergh JUNE 1, 1999 “When I was a student in college, just flying an airplane seemed a dream…” June 1, 1999 Signature Page ~Charles Lindbergh The Cardinal: A 1999 AIAA Graduate Team Aircraft Design EXECUTIVE SUMMARY Commuting from center-city to center-city is not viable with existing aircraft due to the lack of available runways in metropolitan areas for airplanes and higher expense of helicopter service. The Cardinal is a Super Short Takeoff and Landing (SSTOL) aircraft which attempts to fill this gap. The major goal of this airplane design is to fulfill the desire for center-city to center-city travel by utilizing river “barges” for short takeoffs and landings to avoid construction of new runways or heliports. -

Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161 Piper Warrior
Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161 Piper Warrior By Tjimon Meric Louisy A thesis submitted to the College of Engineering and Science of Florida Institute of Technology In partial fulfillment of the requirements For the degree of Master of Science in Flight Test Engineering Melbourne, Florida December 2019 We the undersigned committee hereby approve the attached thesis, “Investigating the Effects of Altitude and Flap Setting on the Specific Excess Power of a PA-28-161 Piper Warrior”, by Tjimon Meric Louisy. _________________________________________________ Brian A. Kish, Ph.D. Assistant Professor Aerospace, Physics and Space Sciences Major Advisor _________________________________________________ Isaac Silver, Ph.D. Associate Professor College of Aeronautics _________________________________________________ Ralph Kimberlin, Dr. Ing Professor Aerospace, Physics and Space Sciences _________________________________________________ Daniel Batcheldor Professor and Department Head Aerospace, Physics and Space Sciences Abstract Investigating the Effects of Altitude and Flap Configuration on the Specific Excess Power of a PA-28-161 Piper Warrior Tjimon Meric Louisy Advisor: Brian A. Kish, Ph.D. The high number of General Aviation (GA) accidents attributed to Loss of Control suggests that GA pilots are lacking low speed awareness and are unable to appropriately recognize when the aircraft is in a low energy state. There is, therefore, an urgent need for the development of an energy management system which is applicable to GA aircraft that can alert the pilot in situations of low energy conditions and recommends to the pilot the appropriate corrective action to restore conditions to a safe energy state. This will require the development of an algorithm that governs this energy management system that considers a comprehensive understanding of the performance capabilities of GA aircraft, particularly the ability of the aircraft to progress from one energy state to another. -

Aircraft Speed Impacts on Community Noise Report (Final) V13
Evaluation of the Impact of Transport Jet Aircraft Approach and Departure Speed on Community Noise Prof. R. John Hansman Jacqueline Thomas Report No. ICAT-2020-03 April 2020 MIT International Center for Air Transportation (ICAT) Department of Aeronautics & Astronautics Massachusetts Institute of Technology CambriDge, MA 02139 USA I. Introduction This report evaluates the impact of changing aircraft speeD During approach anD Departure on community noise for transport category jet aircraft. This analysis is part of a broader stuDy investigating the opportunities to moDify approach anD Departure proceDures to reDuce community noise impact. This report also adDresses a requirement in Section 179 of the FAA Reauthorization Act of 2018 (H.R. 302) to evaluate the relationship between jet aircraft approach anD takeoff speeDs anD corresponDing noise impacts on communities surrounDing airports. II. Impact of Speed on Aircraft Source Noise The primary sources of noise from aircraft are engine anD airframe noise, as shown in Fig. 1. Historically jet engine noise has been the Dominant noise source, particularly During high power settings on takeoff. Modern engines have become significantly quieter [1] anD airframe noise has become increasingly important During lanDing anD for some reDuceD power settings. Aircraft speed impacts engine anD airframe noise Differently, as discussed briefly below. Aircraft Noise Sources Engine Noise Airframe Noise Trailing Edge Fan Slats CombustionCore Flaps Jet Landing Gear Fig. 1 Primary Conventional Turbofan Aircraft Noise Sources Example breakDowns of the various noise components for a representative narrow-body jet transport aircraft after initial Departure anD on final approach are shown in Fig. 2. Engine noise is Dominant on Departure with most of the noise coming from the fan, followeD by the jet. -

AC 25.1581-1 Chg
Subject: Airplane Flight Manual Date: 10/16/12 AC No: 25.1581-1 Initiated By: ANM-110 Change: 1 1. Purpose. This change adds information that was re-located from AC 25-7B Change 1, Flight Test Guide for Certification of Transport Category Airplanes, and revises guidance associated with the maneuvering speed limitation as a result of Amendment 25-130 to Title 14, Code of Federal Regulations (14 CFR) part 25. 2. Applicability. a. The guidance provided in this document is directed to airplane manufacturers, modifiers, and operators of certain transport category airplanes. b. The guidance in this AC is neither mandatory nor regulatory in nature and does not constitute a requirement. You may follow alternate FAA-approved design recommendations. c. While these guidelines are not mandatory, they are derived from extensive FAA and industry experience in determining compliance with the relevant regulations. On the other hand, if we become aware of circumstances that convince us that following this AC would not result in compliance with the applicable regulations, we will not be bound by the terms of this AC, and we may require additional substantiation or design changes as a basis for finding compliance. d. This material does not change, create any additional, authorize changes in, or permit deviations from, regulatory requirements. 3. Principal changes. This change adds material that was moved to this AC from AC 25-7B Change 1. Guidance associated with the maneuvering speed limitation was revised to reflect a change to § 25.1583(a)(3) by Amendment 25-130 to 14 CFR part 25. Additional minor changes were made to update regulatory references, distinguish between regulatory requirements and means of compliance guidance, and for editorial reasons. -

Takeoff Safety Training Aid
Training Aid U.S. Department of Transportation Federal Aviation Administration (This page intentionally left blank) TAKEOFF SAFETY TRAINING AID IMPORTANT - READ IF YOU DESIRE REVISION SERVICE, PLEASE FILL IN THE INFORMATION BELOW: COMPLETE ADDRESS (PLEASE TYPE OR PRINT) COMPANY NAME TITLE ADDRESS RETURN TO: BOEING COMMERCIAL AIRPLANE GROUP P.O. BOX 3707 SEATTLE, WASHINGTON 98124-2207 USA ATTN : MANAGER, AIRLINE SUPPORT CUSTOMER TR41NING AND FLIGHT OPERATIONS SUPPORT ORG. M-7661 MAIL STOP 2T-65 (This page intentionally left blank) t!! Office of the Administrator 800 IndependenceAve., S.W u.s.Defxfrtment Washington,D.C. 20591 of Transportation Federal Aviation Administration AUG13B92 Captain Chester L. Ekstrand Director, Flight Training Boeing Commercial Airplane Group P.O. BOX 3707, MS 2T-62 Seattle, WA 98124-2207 Dear Captain Ekstrand: It is a pleasure to recommend this “Takeoff Safety Training Aid” for use throughout the air carrier industry. This training tool is the culmination of a long, painstaking effort on the part of an industry/Government working group representing a broad segment of the U.S. and international air carrier community. In late 1990, the working group began studying specific cases of rejected takeoff (RTO) accidents and incidents and related human factors issues. Opportunities for making improvements to takeoff procedures and for increasing the levels of aircrew knowledge and skill were indicated. To test this hypothesis, the working group was expanded to include all major aircraft manufacturers, international carriers, and members of the academic community. The general consensus supports enhancing flight safety through widespread use of the material developed. I urge operators to adopt this material for use in qualification and recurring aircrew training programs. -

Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter
University of Tennessee, Knoxville TRACE: Tennessee Research and Creative Exchange Masters Theses Graduate School 12-2007 Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter Adam Joseph Cowan University of Tennessee - Knoxville Follow this and additional works at: https://trace.tennessee.edu/utk_gradthes Part of the Aerospace Engineering Commons Recommended Citation Cowan, Adam Joseph, "Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter. " Master's Thesis, University of Tennessee, 2007. https://trace.tennessee.edu/utk_gradthes/111 This Thesis is brought to you for free and open access by the Graduate School at TRACE: Tennessee Research and Creative Exchange. It has been accepted for inclusion in Masters Theses by an authorized administrator of TRACE: Tennessee Research and Creative Exchange. For more information, please contact [email protected]. To the Graduate Council: I am submitting herewith a thesis written by Adam Joseph Cowan entitled "Effects on Level Flight Performance of the Optimized Wind Deflector Modification for the MD-500 Helicopter." I have examined the final electronic copy of this thesis for form and content and recommend that it be accepted in partial fulfillment of the equirr ements for the degree of Master of Science, with a major in Aviation Systems. Stephen Corda, Major Professor We have read this thesis and recommend its acceptance: Frank G. Collins, U. Peter Solies Accepted for the Council: Carolyn R. Hodges -

CJ-3000 Turbofan Engine Design Proposal
CJ-3000 Turbofan Engine Design Proposal Team Leader: Wang Yingjun Team Member: Guo Minghao & Hu Yu Faculty Advisor: Dr. Chen Min SIGNATURE PAGE Design Team: Wang Yingjun: #921794 Guo Mingha: #921803 Hu Yu: #921800 Acknowledgements The authors would like to thank the following individuals who were instrumental in the success of this engine design: Dr. Chen Min for his tremendous help in completing this proposal. Dr. Li Lin and Dr. Fan Yu for their advice on rotor dynamics Dr. Chen Jiang for his guidance on turbomachinery aerodynamics Dr. Joachim Kurzke, Prof. Peter Jeschke, and Mr. Guo Ran for their aids on GasTurb Our colleague Zhao Jiaheng for his novel idea on cycle design Our senior Li Mingzhe for his instruction on turbine design The work site provided by our College All the teachers, students and facilities who have aided. Abstract The CJ 3000 is a triple-spool, mixed flow, middle bypass ratio turbofan engine designed as a candidate engine for the next generation supersonic transport. The performance of the CJ 3000 is shown to reach all requirements of the RFP. The CJ 3000 offers great performance gains over the requirements and baseline engine, providing required thrust levels and a significantly lower TSFC for all four main flight conditions, less total engine weight, less fuel consumption and NOx emissions, and lower exhaust noise at takeoff. The practical and advanced technologies CJ 3000 employed are presented as follows. Engine Component Technologies Employed Engine Configuration Triple-Spool Engine Inlet System Two-Dimensional