1 Volumetric Energy Density of Compressed Air and Compressed
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A Review of Energy Storage Technologies' Application
sustainability Review A Review of Energy Storage Technologies’ Application Potentials in Renewable Energy Sources Grid Integration Henok Ayele Behabtu 1,2,* , Maarten Messagie 1, Thierry Coosemans 1, Maitane Berecibar 1, Kinde Anlay Fante 2 , Abraham Alem Kebede 1,2 and Joeri Van Mierlo 1 1 Mobility, Logistics, and Automotive Technology Research Centre, Vrije Universiteit Brussels, Pleinlaan 2, 1050 Brussels, Belgium; [email protected] (M.M.); [email protected] (T.C.); [email protected] (M.B.); [email protected] (A.A.K.); [email protected] (J.V.M.) 2 Faculty of Electrical and Computer Engineering, Jimma Institute of Technology, Jimma University, Jimma P.O. Box 378, Ethiopia; [email protected] * Correspondence: [email protected]; Tel.: +32-485659951 or +251-926434658 Received: 12 November 2020; Accepted: 11 December 2020; Published: 15 December 2020 Abstract: Renewable energy sources (RESs) such as wind and solar are frequently hit by fluctuations due to, for example, insufficient wind or sunshine. Energy storage technologies (ESTs) mitigate the problem by storing excess energy generated and then making it accessible on demand. While there are various EST studies, the literature remains isolated and dated. The comparison of the characteristics of ESTs and their potential applications is also short. This paper fills this gap. Using selected criteria, it identifies key ESTs and provides an updated review of the literature on ESTs and their application potential to the renewable energy sector. The critical review shows a high potential application for Li-ion batteries and most fit to mitigate the fluctuation of RESs in utility grid integration sector. -

Fuel Properties Comparison
Alternative Fuels Data Center Fuel Properties Comparison Compressed Liquefied Low Sulfur Gasoline/E10 Biodiesel Propane (LPG) Natural Gas Natural Gas Ethanol/E100 Methanol Hydrogen Electricity Diesel (CNG) (LNG) Chemical C4 to C12 and C8 to C25 Methyl esters of C3H8 (majority) CH4 (majority), CH4 same as CNG CH3CH2OH CH3OH H2 N/A Structure [1] Ethanol ≤ to C12 to C22 fatty acids and C4H10 C2H6 and inert with inert gasses 10% (minority) gases <0.5% (a) Fuel Material Crude Oil Crude Oil Fats and oils from A by-product of Underground Underground Corn, grains, or Natural gas, coal, Natural gas, Natural gas, coal, (feedstocks) sources such as petroleum reserves and reserves and agricultural waste or woody biomass methanol, and nuclear, wind, soybeans, waste refining or renewable renewable (cellulose) electrolysis of hydro, solar, and cooking oil, animal natural gas biogas biogas water small percentages fats, and rapeseed processing of geothermal and biomass Gasoline or 1 gal = 1.00 1 gal = 1.12 B100 1 gal = 0.74 GGE 1 lb. = 0.18 GGE 1 lb. = 0.19 GGE 1 gal = 0.67 GGE 1 gal = 0.50 GGE 1 lb. = 0.45 1 kWh = 0.030 Diesel Gallon GGE GGE 1 gal = 1.05 GGE 1 gal = 0.66 DGE 1 lb. = 0.16 DGE 1 lb. = 0.17 DGE 1 gal = 0.59 DGE 1 gal = 0.45 DGE GGE GGE Equivalent 1 gal = 0.88 1 gal = 1.00 1 gal = 0.93 DGE 1 lb. = 0.40 1 kWh = 0.027 (GGE or DGE) DGE DGE B20 DGE DGE 1 gal = 1.11 GGE 1 kg = 1 GGE 1 gal = 0.99 DGE 1 kg = 0.9 DGE Energy 1 gallon of 1 gallon of 1 gallon of B100 1 gallon of 5.66 lb., or 5.37 lb. -

Re-Examining the Role of Nuclear Fusion in a Renewables-Based Energy Mix
Re-examining the Role of Nuclear Fusion in a Renewables-Based Energy Mix T. E. G. Nicholasa,∗, T. P. Davisb, F. Federicia, J. E. Lelandc, B. S. Patela, C. Vincentd, S. H. Warda a York Plasma Institute, Department of Physics, University of York, Heslington, York YO10 5DD, UK b Department of Materials, University of Oxford, Parks Road, Oxford, OX1 3PH c Department of Electrical Engineering and Electronics, University of Liverpool, Liverpool, L69 3GJ, UK d Centre for Advanced Instrumentation, Department of Physics, Durham University, Durham DH1 3LS, UK Abstract Fusion energy is often regarded as a long-term solution to the world's energy needs. However, even after solving the critical research challenges, engineer- ing and materials science will still impose significant constraints on the char- acteristics of a fusion power plant. Meanwhile, the global energy grid must transition to low-carbon sources by 2050 to prevent the worst effects of climate change. We review three factors affecting fusion's future trajectory: (1) the sig- nificant drop in the price of renewable energy, (2) the intermittency of renewable sources and implications for future energy grids, and (3) the recent proposition of intermediate-level nuclear waste as a product of fusion. Within the scenario assumed by our premises, we find that while there remains a clear motivation to develop fusion power plants, this motivation is likely weakened by the time they become available. We also conclude that most current fusion reactor designs do not take these factors into account and, to increase market penetration, fu- sion research should consider relaxed nuclear waste design criteria, raw material availability constraints and load-following designs with pulsed operation. -

Ammonia, Anhydrous Ama
AMMONIA, ANHYDROUS AMA CAUTIONARY RESPONSE INFORMATION 4. FIRE HAZARDS 7. SHIPPING INFORMATION 4.1 Flash Point: 7.1 Grades of Purity: Commercial, industrial, Common Synonyms Liquefied compressed Colorless Ammonia odor Not flammable under conditions likely to refrigeration, electronic, and metaflurgical Liquid ammonia gas be encountered grades all have purity greater than 99.5% 4.2 Flammable Limits in Air: 15.50%- 7.2 Storage Temperature: Ambient for pressurized 27.00% ammonia; low temperature for ammonia at Floats and boils on water. Poisonous, visible vapor cloud is produced. 4.3 Fire Extinguishing Agents: Stop flow of atmospheric pressure Avoid contact with liquid and vapor. Keep people away. gas or liquid. Let fire burn. 7.3 Inert Atmosphere: No requirement Wear goggles, self-contained breathing apparatus, and rubber overclothing (including gloves). 4.4 Fire Extinguishing Agents Not to Be 7.4 Venting: Safety relief 250 psi for ammonia Stop discharge if possible. Used: None under pressure. Pressure-vacuum for Stay upwind and use water spray to ``knock down'' vapor. 4.5 Special Hazards of Combustion ammonia at atmospheric pressure. Call fire department. Products: Not pertinent Isolate and remove discharged material. 7.5 IMO Pollution Category: Currently not available 4.6 Behavior in Fire: Not pertinent Notify local health and pollution control agencies. 7.6 Ship Type: 2 4.7 Auto Ignition Temperature: 1204°F Protect water intakes. 7.7 Barge Hull Type: 2 4.8 Electrical Hazards: Class I, Group D Combustible. 4.9 Burning Rate: 1 mm/min. Fire 8. HAZARD CLASSIFICATIONS Wear goggles, self-contained breathing apparatus, and rubber over- 4.10 Adiabatic Flame Temperature: Currently clothing (including gloves). -

HEATS of COMBUSTION of DIAMOND and of GRAPHITE by Ralph S
r---------------___........,._ . _____~ ~_ U. S. DEPARTMENT OF COMMERCE NATIONAL BUREAU OF STANDARDS RESEARCH PAPER RP1140 Part of Journal of Research of the }.{ational Bureau of Standards, Volume 21, October 1938 HEATS OF COMBUSTION OF DIAMOND AND OF GRAPHITE By Ralph S. Jessup ABSTRACT Measurements were made of the heats of combustion of one artificial graphite, two natural graphites, and two samples of diamond. The bomb calorimeter used was calibrated electrically and by means of benzoic acid. The amount of reaction in each combustion experiment was determined from the mass of carbon dioxide formed. This method of determining the amount of reaction automatically eliminates the effect of unburned carbon and of some impurities. It was found, however, that results for different samples did not agree unless the samples were purified. Two methods of purification were used: (a) heating in vacuo to 1,800° C and (b) treatment with hydrochloric and hydrofluoric acids and subsequent heating in vacuo to 200° C to remove traces of the acids. Both methods yielded graphite containing only small amounts of impurities. The mean value obtained for the heat of combustion (-/lH) of the purified graphites in oxygen at 25° C and a constant pressure of 1 atmosphere to form gaseous carbon dioxide at the same temperature and pressure was 393.396 international kilojoules per mole (44.010 g of CO2). The maximum deviation of the mean value for anyone of the purified samples from this value was 0.021 percent. The two samples of diamond, purified by treatment with aqueous hydrochloric and hydrofluoric acids and subsequently heated in vacuo to about 570° C, had average particle sizes of 2.5 I'- and 39.5 1'-, respectively, and yielded the following respective mean values for the heat of combustion (-/lH) at 25° C and 1 atmos phere, in oxygen to form gaseous carbon dioxide: 395.771 and 395.287 interna tional kilojoules per mole. -

Energy and the Hydrogen Economy
Energy and the Hydrogen Economy Ulf Bossel Fuel Cell Consultant Morgenacherstrasse 2F CH-5452 Oberrohrdorf / Switzerland +41-56-496-7292 and Baldur Eliasson ABB Switzerland Ltd. Corporate Research CH-5405 Baden-Dättwil / Switzerland Abstract Between production and use any commercial product is subject to the following processes: packaging, transportation, storage and transfer. The same is true for hydrogen in a “Hydrogen Economy”. Hydrogen has to be packaged by compression or liquefaction, it has to be transported by surface vehicles or pipelines, it has to be stored and transferred. Generated by electrolysis or chemistry, the fuel gas has to go through theses market procedures before it can be used by the customer, even if it is produced locally at filling stations. As there are no environmental or energetic advantages in producing hydrogen from natural gas or other hydrocarbons, we do not consider this option, although hydrogen can be chemically synthesized at relative low cost. In the past, hydrogen production and hydrogen use have been addressed by many, assuming that hydrogen gas is just another gaseous energy carrier and that it can be handled much like natural gas in today’s energy economy. With this study we present an analysis of the energy required to operate a pure hydrogen economy. High-grade electricity from renewable or nuclear sources is needed not only to generate hydrogen, but also for all other essential steps of a hydrogen economy. But because of the molecular structure of hydrogen, a hydrogen infrastructure is much more energy-intensive than a natural gas economy. In this study, the energy consumed by each stage is related to the energy content (higher heating value HHV) of the delivered hydrogen itself. -

Thermochemistry of Heteroatomic Compounds:Calculation of the Heat
Open Journal of Physical Chemistry, 2011, 1, 1-5 doi:10.4236/ojpc.2011.11001 Published Online May 2011 (http://www.SciRP.org/journal/ojpc) Thermochemistry of Heteroatomic Compounds: Calculation of the heat of Combustion and the heat of Formation of some Bioorganic Molecules with Different Hydrophenanthrene Rows Vitaly V. Ovchinnikov Tupolev Kazan State Technical University, St- K. Marks 10, 420111 Kazan, Russian Federation E-mail: [email protected] Received March 23rd, 2011; revised April 10th, 2011; accepted May 10th, 2011. Abstract On the basis of the known experimental heats of combustions of the seventeen alkanes in condensed state, the general equation comb HifNg has been deduced, in which i and f are correlation coefficients, N and g are a numbers of valence electrons and lone electron pairs of heteroatoms in molecule. The pre- sented dependence has been used for the calculation of the heats of combustion of thirteen organic molecules with biochemical properties: holestan, cholesterol, methyl-cholesterol, ergosterol, vitamin-D2, estradiol, an- drostenone, testosterone, androstanedione, morphine, morphinanone, codeine and pentasozine. It is noted that good convergence was obtained within the limits of errors of thermochemical experiments known in the literature and calculations of the heats of combustion for some of them were conducted. With the application of Hess law and the heats of vaporization vap H , which has been calculated with the use of a topological 1 s solvation index of the first order x , the heats of formation f H for condensed and gaseous phases were calculated for the listed bioorganic molecules. Keywords: Alkanes, Biochemical Molecules, the Heat of Combustion, Heat of Formation, Heat of Vaporiza- tion, Topological Solvation Index 1. -
Ces-Collins-Pp-Ev-Conundrum
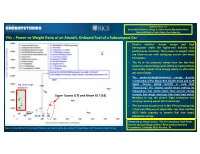
Gabriel Collins, J.D. Baker Botts Fellow for Energy & Environmental Regulatory Affairs Baker Institute for Public Policy, Rice University EVs = Power-to-WeigHt Ratio of an Aircraft, Onboard Fuel of a Subcompact Car • Electric veHicles’ instant torque and higH horsepower make the higher-end editions true performance monsters. Their power-to-weigHt ratios are often on par witH turboprop aircraft and many helicopters. • The fly in the ointment comes from the fact that batteries remain heavy and relative to hydrocarbons and simply cannot store energy nearly as efficiently per unit of mass. • The power-to-weigHt/onboard energy density relationsHip of the Rivian R1T electric truck and A-29 Big, long-range Super Tucano attack aircraft is sucH that platforms “Rivianizing” the Tucano would mean making its onboard jet fuel stores retain their current energy Super Tucano (17) and Rivian R1T (14) content, but weigH more per liter than lead metal. Needless to say, the plane’s fligHt endurance and carrying capacity would fall dramatically. • This estimate assumes the A-29’s PT-6 turboprop has a thermal efficiency of about 35%--less than half the R1T’s likely capacity to convert fuel into actual propulsive energy. Please cite as: Gabriel Collins, “The EV Conundrum: High Power Density and Low Energy Density,” Baker Institute ResearcH Source: Beechcraft, Car & Driver, EIA, EV Database, GE, Global Security, Man, Nikola, Peterbuilt, Rivian, SNC, Trucks.com, USAF, US Navy Presentation, 8 January 2020, Houston, TX Gabriel Collins, J.D. Baker Botts Fellow for Energy & Environmental Regulatory Affairs Baker Institute for Public Policy, Rice University Electric Vehicles’ Onboard Energy Still Significantly Trails ICE Vehicles On an Efficiency-Adjusted Basis Efficiency-Adjusted Comparison • To make the energy density comparison a bit more fair, we adjust the onboard fuel based on the fact that EVs convert nearly 80% of their battery energy into tractive power at the wheels, while IC vehicles feature efficiencies closer to 20%. -

Thermal Properties of Petroleum Products
UNITED STATES DEPARTMENT OF COMMERCE BUREAU OF STANDARDS THERMAL PROPERTIES OF PETROLEUM PRODUCTS MISCELLANEOUS PUBLICATION OF THE BUREAU OF STANDARDS, No. 97 UNITED STATES DEPARTMENT OF COMMERCE R. P. LAMONT, Secretary BUREAU OF STANDARDS GEORGE K. BURGESS, Director MISCELLANEOUS PUBLICATION No. 97 THERMAL PROPERTIES OF PETROLEUM PRODUCTS NOVEMBER 9, 1929 UNITED STATES GOVERNMENT PRINTING OFFICE WASHINGTON : 1929 F<ir isale by tfttf^uperintendent of Dotmrtients, Washington, D. C. - - - Price IS cants THERMAL PROPERTIES OF PETROLEUM PRODUCTS By C. S. Cragoe ABSTRACT Various thermal properties of petroleum products are given in numerous tables which embody the results of a critical study of the data in the literature, together with unpublished data obtained at the Bureau of Standards. The tables contain what appear to be the most reliable values at present available. The experimental basis for each table, and the agreement of the tabulated values with experimental results, are given. Accompanying each table is a statement regarding the esti- mated accuracy of the data and a practical example of the use of the data. The tables have been prepared in forms convenient for use in engineering. CONTENTS Page I. Introduction 1 II. Fundamental units and constants 2 III. Thermal expansion t 4 1. Thermal expansion of petroleum asphalts and fluxes 6 2. Thermal expansion of volatile petroleum liquids 8 3. Thermal expansion of gasoline-benzol mixtures 10 IV. Heats of combustion : 14 1. Heats of combustion of crude oils, fuel oils, and kerosenes 16 2. Heats of combustion of volatile petroleum products 18 3. Heats of combustion of gasoline-benzol mixtures 20 V. -

Sodium‐Ion Batteries Paving the Way for Grid Energy Storage
ESSAY 10th Anniversary Article www.advenergymat.de Sodium-Ion Batteries Paving the Way for Grid Energy Storage Hayley S. Hirsh, Yixuan Li, Darren H. S. Tan, Minghao Zhang, Enyue Zhao, and Y. Shirley Meng* Dedicated to the pioneering scientists whose work have made sodium-ion batteries possible bridge the disconnect between renewables The recent proliferation of renewable energy generation offers mankind hope, generation and distribution for consump- with regard to combatting global climate change. However, reaping the full tion. While stationary storage such as benefits of these renewable energy sources requires the ability to store and pumped hydroelectric and compressed air exist, their lack of flexible form factors and distribute any renewable energy generated in a cost-effective, safe, and sus- lower energy efficiencies limit their scal- tainable manner. As such, sodium-ion batteries (NIBs) have been touted as able adoption for urban communities.[2] an attractive storage technology due to their elemental abundance, promising Thus, batteries are believed to be more electrochemical performance and environmentally benign nature. Moreover, practical for large-scale energy storage new developments in sodium battery materials have enabled the adoption of capable of deployment in homes, cities, high-voltage and high-capacity cathodes free of rare earth elements such as Li, and locations far from the grid where the traditional electrical infrastructure does Co, Ni, offering pathways for low-cost NIBs that match their lithium coun- not reach. terparts in energy density while serving the needs for large-scale grid energy Today’s battery technologies are domi- storage. In this essay, a range of battery chemistries are discussed alongside nated by lithium ion batteries (LIBs) and their respective battery properties while keeping metrics for grid storage in lead acid batteries. -

Chapter Two Properties of Ammonia
Chapter Two Properties of Ammonia Physical Properties General Anhydrous ammonia exists as either a colorless gas, colorless liquid, or white solid, depending on its pressure and temperature. In nearly all commonly encountered situations, it exists as either a liquid or a gas. The gas is less dense than air and the liquid is less dense than water at standard conditions. Ammonia gas (vapor) diffuses readily in air and the liquid is highly soluble in water with an accompanying release of heat. Ammonia exhibits classical saturation relationships whereby pressure and temperature are directly related so long as both the vapor and liquid phase are present. It does have a critical pressure and temperature. At atmospheric pressure, a closed container of ammonia vapor and liquid will be in equilibrium at a temperature of –28°F [–33°C]. It should be noted however that if liquid ammonia is spilled or released to the atmosphere at normal temperatures, the resultant pool of boiling liquid will be significantly colder than –28°F due to the law of partial pressures (the partial pressure of the ammonia vapor in the air near the liquid surface will be less than atmospheric pressure). The following table provides some of the important physical properties of ammonia. TABLE 2-1 Physical Properties of Ammonia Property Condition Value (IP) Value (SI) Molecular Weight 17.03 17.03 Color None None Physical State Room Temp Gas Gas Freezing Point P=1 atm –108°F –78°C Boiling Point P=1 atm –28.1°F –33.3°C Critical Pressure 1657 psia 11,410 kPa Critical Temp 271°F -

Grid Energy Storage
Grid Energy Storage U.S. Department of Energy December 2013 Acknowledgements We would like to acknowledge the members of the core team dedicated to developing this report on grid energy storage: Imre Gyuk (OE), Mark Johnson (ARPA-E), John Vetrano (Office of Science), Kevin Lynn (EERE), William Parks (OE), Rachna Handa (OE), Landis Kannberg (PNNL), Sean Hearne & Karen Waldrip (SNL), Ralph Braccio (Booz Allen Hamilton). Table of Contents Acknowledgements ....................................................................................................................................... 1 Executive Summary ....................................................................................................................................... 4 1.0 Introduction .......................................................................................................................................... 7 2.0 State of Energy Storage in US and Abroad .......................................................................................... 11 3.0 Grid Scale Energy Storage Applications .............................................................................................. 20 4.0 Summary of Key Barriers ..................................................................................................................... 30 5.0Energy Storage Strategic Goals .......................................................................................................... 32 6.0 Implementation of its Goals ...............................................................................................................