Intelligent Gyro Compass (Igc)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ISDN TA PC Card User Manual INTRODUCTION the ISDN TA PC Card Brings the Latest in Mobile Communication Technology with Flexibility and Convenience
ISDN TA PC Card User Manual INTRODUCTION The ISDN TA PC Card brings the latest in mobile communication technology with flexibility and convenience. With the wide range ISDN signaling protocols switches supports, mobile experts may enjoy the mobile communication across the world and the high speed digital service. System Requirements Pentium 75 or above At least 30MB free hard disk space At least 16MB RAM PCMCIA Type II/III slot PCMCIA Card Services and Socket Services v.2.1 or higher pre-installed Windows 95/98/2000 or Windows NT pre-installed Specifications Standard PCMCIA 2.1 & JEIDA 4.1 compliant ISDN standards Basic Rate Access (2B+D) S/T-Interface: Compliant with ITU-T I.430 D-channel: ITU-T Q.921, Q.931 ETSI NET3 B-channel: V.120, V.110, X.75/T.70NL/ISO8208 Async-to-Sync PPP conversion Multilink PPP, 56 K Modem (CAPI only) G3 fax (CAPI only) - 1 - Voice (CAPI only) Line Rate 64/56 Kbps on 1 B-channel 128/112 Kbps on 2 B-channel (PPP/MP) 64/56Kbps on 1 B-channel 16Kbps on D-channel ISDN Network & Switch Compatibility National ISDN-1 (NI-1) AT&T 5ESS Custom Northen Telecom DMS-100 Custom DSS1 (Euro-ISDN) INS-Net 64 Application Program Interface Supported VCOMM WinISDN CAPI 2.0 NDIS WAN Operating System Supported Windows 95 and OSR2 Windows 98 Windows 2000 Windows NT 4.0 Physical Specifications RJ-45 ISDN line interface Dimension: 85.6 x 54 x 5 (mm) PCMCIA Type II - 2 - Parts Names 15-pin PC Card Connector ISDN Network Connection Cable - 3 - HARDWARE INSTALLATION If you are using the ISDN TA PC Card under Windows 95/98/2000, Do NOT insert the PCMCIA card until after the software installation is completed. -
Front Matter + Functional
Infortrend External RAID Controller & Subsystem Generic Operation Manual Revision 1.62 Firmware Version: 3.31h Asia Pacific Americas (International headquarter) Infortrend Technology, Inc. Infortrend Corporation 8F, No. 102 Chung-Shan Rd., Sec. 3 3150 Coronado Drive, Unit C Chung-Ho City, Taipei Hsien, Taiwan Santa Clara, CA 95054, USA Tel: (886)-2-2226-0126 Tel: (408) 988-5088 Fax: (886)-2-2226-0020 Fax: (408) 988-6288 [email protected] [email protected] [email protected] [email protected] www.infortrend.com.tw www.infortrend.com China Europe (EMEA) Infortrend Technology, Limited Infortrend Europe Limited Room 1210, West Wing, Tower One, 5 Elmwood, Crockford Lane Junefield Plaza, No. 6 Xuanwumen Street, Chineham Business Park Xuanwu District, Beijing, China. Basingstoke, Hampshire Post code: 100052 RG24 8WG, UK Tel: 8610-63106168 Tel: +44-1256-70-77-00 Fax: 8610-63106188 Fax:+44-1256-70-78-89 [email protected] [email protected] [email protected] [email protected] www.infortrend.com.cn www.infortrend-europe.com Copyright © 2003 This Edition First Published 2003 All rights reserved. No part of this publication may be reproduced, transmitted, transcribed, stored in a retrieval system, or translated into any language or computer language, in any form or by any means, electronic, mechanical, magnetic, optical, chemical, manual or otherwise, without the prior written consent of Infortrend Technology, Inc. Disclaimer Infortrend Technology makes no representations or warranties with respect to the contents hereof and specifically disclaims any implied warranties of merchantability or fitness for any particular purpose. Furthermore, Infortrend Technology reserves the right to revise this publication and to make changes from time to time in the content hereof without oblig- ation to notify any person of such revisions or changes. -
The PC Weasel PCI
The PC Weasel PCI Making servers run headless since 1999 User Documentation - Version 1.01 PC Weasel PCI Table of Contents Section . .Page Contact Information . 3 Documentation Revision History . 3 Introduction . 5 Installation Guide . 7 PC Weasel User Guide . 11 Loading the PC Weasel firmware . 29 Application notes . 33 Appendix 1: Motorola Format . 39 Copyright 2002 Middle Digital Incorporated 1 PC Weasel PCI User Documentation - Version 1.01 Blank page alert. 2 Copyright 2002 Middle Digital Incorporated User Documentation - Version 1.01 PC Weasel PCI Contact Information Web Page http://www.realweasel.com/ FTP Server ftp://ftp.realweasel.com/pub/realweasel/ Demo System PCI: telnet://pci-demo.realweasel.com ISA: telnet://isa-demo.realweasel.com Technical Support [email protected] Sales [email protected] Documentation [email protected] (for comments & corrections) Mailing Address Middle Digital Incorporated PO Box 2621, Station M Calgary, Alberta, Canada T2P 3C1 Address for Courier Service Middle Digital Incorporated not Post 238 11th Avenue SE Calgary, Alberta, Canada T2G 0X8 Vox 403-705-2025 Fax 403-705-2026 Documentation Revision History First release: 1.00 (somewhat premature) December 15th, 2001. Second release: 1.01 (minor corrections) March 4th, 2002. Copyright 2002 Middle Digital Incorporated 3 PC Weasel PCI User Documentation - Version 1.01 Blank page test. 4 Copyright 2002 Middle Digital Incorporated User Documentation - Version 1.01 PC Weasel PCI 1. Introduction The PC Weasel PCI is the mutant bastard child of Big Blue, open-source computing, and an inbred mass-murdering hillbilly. Depending on your point of view, it's either: a) a video board with serial output instead of a monitor and a keyboard with serial input instead of keys, or b) a serial board that emulates a video board and a keyboard. -

Science and the Instrument-Maker
r f ^ Science and the Instrument-maker MICHELSON, SPERRY, AND THE SPEED OF LIGHT Thomas Parke Hughes SMITHSONIAN STUDIES IN HISTORY AND TECHNOLOGY • NUMBER 37 Science and the Instrument-maker MICHELSON, SPERRY, AND THE SPEED OF LIGHT Thomas Parke Hughes Qmit/isoDian Ij;i^titution 'PJ^SS City of Washington 1976 ABSTRACT Hughes, Thomas Parke. Science and the Instrument-maker: Michelson, Sperry, and the Speed of Light. Smithsonian Studies in History and Technology, number 37, 18 pages, 9 figures, 2 tables, 1976.-This essay focuses on the cooperative efforts between A. A. Michelson, physicist, and Elmer Ambrose Sperry, inventor, to produce the instr.umentation for the determination of the speed of light. At the conclusion of experiments made in 1926, Michelson assigned the Sperry in struments the highest marks for accuracy. The value of the speed of light accepted by many today (299,792.5 km/sec) varies only 2.5 km/sec from that obtained using the Sperry octagonal steel mirror. The main problems of producing the instrumentation, human error in the communication of ideas to effect that in strumentation, a brief description of the experiments to determine the speed of light, and the analysis and evaluation of the results are discussed. OFFICIAL PUBLICATION DATE is handstamped in a limited number of initial copies and is recorded in the Institution's report, Smithsonian Year. Si PRESS NUMBER 6I41. COVER: A. A. Michelson and Elmer Ambrose Sperry. Library of Congress Cataloging in Publication Data Hughes, Thomas Parke. Science and the instrument-maker. (Smithsonian studies in histoi7 and technology ; no. 37) Supt. -
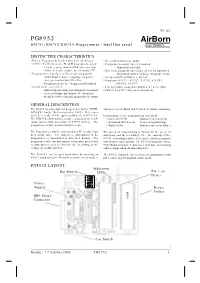
PG8952 89C51/89C52/89C55 Programmer - Intel Hex Serial ELECTRONICS
V1.01 ELECTRONICS PG8952 89C51/89C52/89C55 Programmer - Intel Hex serial ELECTRONICS DISTINCTIVE CHARACTERISTICS • Erases, Programs & Verifies Atmel 40 pin micros • Green/Red Indicator LEDs • 89C51/52 Devices use FLASH program memory • Programs Security bits, if required - Can be reprogrammed 1000 times per chip - Dipswitch selectable - 10ms electronic erasure, vs. 30 minute UV • One Step program operation, as set by dipswitch • Programmer interface is PC serial compatible - Download starts Test/Erase/Program/Verify - 9600 Baud, 8 data, 2 stop bits, no parity • No special PC software required - Accepts standard Intel Hex files • Programs 89C51, 89C52, 89C55, 89LV51, - Programs on the fly - during serial download 89LV52, 89C55 • Stand-alone test switch • Fast operation - programs 4kbytes in 12 sec (typ) - Allows chip operating test without PC download • Powered by DC plug pack (supplied) - Tests for blank chip without PC download - Reads & Verifies chip data against last checksum GENERAL DESCRIPTION The PG8952 is a development programmer for the ATMEL indicates Tested, Blank and Verified checksum conditions. AT89C51 family, - Referred to as the 89C51. References made here to the 89C51 apply equally to the 89C52/55. In normal use device programming consists of: The PG8952 allows testing, erasure, programming, verifi- • Insert an 89C51 (Manual Test if desired) cation and security protection of 89C51 devices. The • Download intel hex file (Causes programming) programmer is fast, small and simple to use. • Watch LEDs (Indicates success or failure) The Programmer may be connected to a PC or other host The speed of programming is limited by the speed of by a serial cable. The data to be downloaded to the download, and for a 4 kilobyte file - the capacity of the programmer is transmitted in Intel Hex format. -
Front Matter + Functional
Infortrend External RAID Controller & Subsystem Generic Operation Manual Revision 1.61 Firmware Version: 3.31 Asia Pacific Americas (International headquarter) Infortrend Technology, Inc. Infortrend Corporation 8F, No. 102 Chung-Shan Rd., Sec. 3 3150 Coronado Drive, Unit C Chung-Ho City, Taipei Hsien, Taiwan Santa Clara, CA 95054, USA Tel: (886)-2-2226-0126 Tel: (408) 988-5088 Fax: (886)-2-2226-0020 Fax: (408) 988-6288 [email protected] [email protected] [email protected] [email protected] www.infortrend.com.tw www.infortrend.com China Europe Infortrend Technology, Limited Infortrend Europe Limited Room 1236 Tower C Corporate Square Ground Floor, Chancery House No. 35 Financial Street Xicheng District St. Nicholas Way, Sutton, Beijing China 100032 Surrey, SM1 1JB, United Kingdom Tel: (86)-10-88091540 Tel:+44-(0)20 8770 1838 Fax: (86)-10-88092126 Fax:+44-(0)20 8770 7409 [email protected] [email protected] [email protected] [email protected] www.infortrend.com.cn www.infortrend-europe.com Copyright © 2003 This Edition First Published 2003 All rights reserved. No part of this publication may be reproduced, transmitted, transcribed, stored in a retrieval system, or translated into any language or computer language, in any form or by any means, electronic, mechanical, magnetic, optical, chemical, manual or otherwise, without the prior written consent of Infortrend Technology, Inc. Disclaimer Infortrend Technology makes no representations or warranties with respect to the contents hereof and specifically disclaims any implied warranties of merchantability or fitness for any particular purpose. Furthermore, Infortrend Technology reserves the right to revise this publication and to make changes from time to time in the content hereof without oblig- ation to notify any person of such revisions or changes. -

3D Rigid Body Dynamics: Tops and Gyroscopes
J. Peraire, S. Widnall 16.07 Dynamics Fall 2008 Version 2.0 Lecture L30 - 3D Rigid Body Dynamics: Tops and Gyroscopes 3D Rigid Body Dynamics: Euler Equations in Euler Angles In lecture 29, we introduced the Euler angles as a framework for formulating and solving the equations for conservation of angular momentum. We applied this framework to the free-body motion of a symmetrical body whose angular momentum vector was not aligned with a principal axis. The angular moment was however constant. We now apply Euler angles and Euler’s equations to a slightly more general case, a top or gyroscope in the presence of gravity. We consider a top rotating about a fixed point O on a flat plane in the presence of gravity. Unlike our previous example of free-body motion, the angular momentum vector is not aligned with the Z axis, but precesses about the Z axis due to the applied moment. Whether we take the origin at the center of mass G or the fixed point O, the applied moment about the x axis is Mx = MgzGsinθ, where zG is the distance to the center of mass.. Initially, we shall not assume steady motion, but will develop Euler’s equations in the Euler angle variables ψ (spin), φ (precession) and θ (nutation). 1 Referring to the figure showing the Euler angles, and referring to our study of free-body motion, we have the following relationships between the angular velocities along the x, y, z axes and the time rate of change of the Euler angles. The angular velocity vectors for θ˙, φ˙ and ψ˙ are shown in the figure. -

PUBLIC NOTICE Us* - FEDERAL COMMUNICATIONS COMMISSION 1919 M STREET N.W
PUBLIC NOTICE us* - FEDERAL COMMUNICATIONS COMMISSION 1919 M STREET N.W. WASHINGTON, D.C. 20554 News media information 202/4184500 Recorded listing of releases and texts 202/418-2222. DA 96-588 April 15,1996 CORRECTION TO PUBLIC NOTICE DA 96-586 "FCC Announces Winning Bidders in the Auction of 1,020 Licenses to Provide 900 MHz SMR in Major Trading Areas" FCC Form 159 For the "License No." designation in Block 18 of FCC Form 159, winning bidders should list the "License No." as it appears in Attachment C of the Bidder Information Package, e.g. YSMO51A. Examples of Down Payment Calculations Example 1 Upfront Payment Amount $5,000 Withdrawal Payment Amount $0 Amount of Upfront to be Counted Towards Down Payment $5,000 Small Business Status Small business under the $15 million definition High Bid Net High Down ProRata% Amtfrom Balance Amount BidAmt Payment ofDown Upfront Due Amount Payment Payment Lie. A $80,000 $72,000 $3,600 25% $1,250 $2350 Lic.B $100,000 $90,000 $4,500 75% $3,750 $750 (100%) 18636 Attachment D- Electronic Filing The Commission recently implemented a remote access system which will allow applicants to submit their FCC applications electronically. FCC applications that are filed electronically using this remote access system must be submitted and confirmed by April 29, 1996. An FCC application may be submitted only once; no changes will be permitted after the submission of an FCC application. More detailed filing instructions will be provided in the Help facility and in the Readme.txt file associated with the FCC Electronic Filing/Application Review Software. -

User's Manual Is Accurate; PLANET Disclaims Liability for Any Inaccuracies Or Omissions That May Have Occurred
User’s Manual of IGSW-24040T Trademarks Copyright © PLANET Technology Corp. 2016. Contents are subject to revision without prior notice. PLANET is a registered trademark of PLANET Technology Corp. All other trademarks belong to their respective owners. Disclaimer PLANET Technology does not warrant that the hardware will work properly in all environments and applications, and makes no warranty and representation, either implied or expressed, with respect to the quality, performance, merchantability, or fitness for a particular purpose. PLANET has made every effort to ensure that this User's Manual is accurate; PLANET disclaims liability for any inaccuracies or omissions that may have occurred. Information in this User's Manual is subject to change without notice and does not represent a commitment on the part of PLANET. PLANET assumes no responsibility for any inaccuracies that may be contained in this User's Manual. PLANET makes no commitment to update or keep current the information in this User's Manual, and reserves the right to make improvements to this User's Manual and/or to the products described in this User's Manual, at any time without notice. If you find information in this manual that is incorrect, misleading, or incomplete, we would appreciate your comments and suggestions. FCC Warning This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the Instruction manual, may cause harmful interference to radio communications. -
Chapter 7 – Autopilot Models for Course and Heading Control
Chapter 7 – Autopilot Models for Course and Heading Control 7.1 Autopilot Models for Course Control 7.2 Autopilot Models for Heading Control Automatic pilot, “also called autopilot, or autohelmsman, device for controlling an aircraft or other vehicle without constant human intervention.” Ref. Encyclopedia Britannica The first aircraft autopilot was developed by Sperry Corporation in 1912. It permitted the aircraft to fly straight and level on a compass course without a pilot's attention, greatly reducing the pilot's workload. Elmer Ambrose Sperry, Sr. (1860–1930) Lawrence Sperry (the son of famous inventor Elmer Sperry) demonstrated it in 1914 at an aviation safety contest held in Paris. Sperry demonstrated the credibility of the invention by flying the aircraft with his hands away from the controls. He was killed in 1923 when his aircraft crashed in the English channel. In the early 1920s, the Standard Oil tanker J.A. Moffet became the first ship to use an autopilot. Ref. Wikipedia Lawrence Burst Sperry (1892—1923) 1 Lecture Notes TTK 4190 Guidance, Navigation and Control of Vehicles (T. I. Fossen) Chapter Goals • Be able to explain the differences of course and heading controlled marine craft. In what applications are they used. • Understand what the crab angle is for a marine craft: • Understand why heading control is used instead of course control during stationkeeping. • Be able to compute the COG using two waypoints • Know what kind of sensors that give you a direct measurement of SOG and COG under water and on the surface. • Understand the well-celebrated Nomoto models for heading and course control, and it is extension to nonlinear theory (maneuvering characteristics) • Be able to explain what the pivot point is. -

Basic Instruments Introduction Instruments Mechanically Measure Physical Quantities Or Properties with Varying Degrees of Accuracy
Chapter 3 Basic Instruments Introduction Instruments mechanically measure physical quantities or properties with varying degrees of accuracy. Much of a navigator’s work consists of applying corrections to the indications of various instruments and interpreting the results. Therefore, navigators must be familiar with the capabilities and limitations of the instruments available to them. A navigator obtains the following flight information from basic instruments: direction, altitude, temperature, airspeed, drift, and groundspeed (GS). Some of the basic instruments are discussed in this chapter. The more complex instruments that make accurate and long distance navigation possible are discussed in later chapters. 3-1 Direction The force of the magnetic field of the earth can be divided into two components: the vertical and the horizontal. The Basic Instruments relative intensity of these two components varies over the The navigator must have a fundamental background in earth so that, at the magnetic poles, the vertical component navigation to ensure accurate positioning of the aircraft. Dead is at maximum strength and the horizontal component is reckoning (DR) procedures aided by basic instruments give minimum strength. At approximately the midpoint between the navigator the tools to solve the three basic problems of the poles, the horizontal component is at maximum strength navigation: position of the aircraft, direction to destination, and the vertical component is at minimum strength. Only and time of arrival. Using only a basic instrument, such as the the horizontal component is used as a directive force for a compass and drift information, you can navigate directly to magnetic compass. Therefore, a magnetic compass loses its any place in the world. -

GYROCOMPASS CMZ 900 Series
GYROCOMPASS CMZ 900 series Bulletin 80B10M09E 2nd Edition CMZ 900 GYROCOMPASS is highly reliable and long life. CONTROL BOX (MKC 326/327) MASTER COMPASS (MKM 026) A gyrocompass detects the true north by means of a fast-spinning rotor, which is suspended with no friction and is influenced by gravity and rotation of the Earth. A gyrocompass consequently indicates a ship's heading. CMZ 900 series has been type approved in accordance with International Maritime Organization (IMO) standards, resolution A.424(XI) as well as JIS-F9602, class A standards. FEATURES -A modular design saves the space. MASTER COMPASS can be integrated in the autopilot steering stand. -Manual and automatic speed error correction -External heading sensor can back up the heading outputs. -Serial data output IEC 61162-2 (high-speed transmission) -An unique anti-vibration mechanism enhanced by the velocity damping effect of high viscous oil, provides superior damping of vibration and decoupling of shock at sea. -A small and lightweight container enhances the follow up speed. The gyrocompass reading changes smoothly and does not lag when a small ship rapidly changes course. -Easy maintenance and long maintenance periods Titanium capsule and electrodes are employed for GYROSPHERE. Purity is maintained inside of the container, and maintenance interval is then longer-dated. The container is divided into two pieces at bottom when overhauled. Ship's crew can replace GYROSPHERE in case of emergency. Easy maintenance Titanium capsule PERFORMANCE and electrodes SPECIFICATIONS (lower hemisphere) -Accuracy: Static:±0.25° x sec Lat. Dynamic:±0.75° x sec Lat. -Settling time:Within 5 hours -Follow up accuracy:0.1° or less -Max.