Dynamic Modelling for the Path Tracking Control of a Four-Wheel
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

From the Intelligent Wheel Bearing to the Robot Wheel: Schaeffler
29 Robot Wheel 29 Robot Wheel Robot Wheel 29 From the intelligent wheel bearing to the “robot wheel” Bernd Gombert 29 378 Schaeffl er SYMPOSIUM 2010 Schaeffl er SYMPOSIUM 2010 379 29 Robot Wheel Robot Wheel 29 ered as well. Mechanical steering and braking ele- The increasing ments are being replaced by mechatronic compo- nents thereby leading to higher functi onality with requirements placed increased safety. When referring to the further developments in on motor vehicles safety, the vision of “zero accidents” (autonomous and accident-free driving) has to be menti oned. Why is the trend heading Aft er slip control braking and driving stability sys- towards electromobility? tems, driver assistance systems known as ADAS (Advanced Driver Assistance Systems) are now be- Environmentally-friendly electrical mobility is the ing created as a further requirement for making expected trend and will become a real alternati ve this vision a reality. Figure 2 The fi rst electric vehicle, built in 1835 [1] Figure 4 Lohner-Porsche with four wheel hub motors to the current state of the art. Innovati ve technolo- By-wire technology, amongst others, is one of the in 1900 [1] gies, high oil prices and the increasing ecological nate the transmission and drive shaft since the prerequisites for the implementati on of ADAS. It awareness of many people are reasons, why elec- wheel rotated as the rotor of the direct current In order to compensate for the lack of range, of- monitors the current traffi c situati on and acti vely tromobility is increasingly gaining worldwide ac- motor around the stator, that was fixed to the fered by a vehicle only powered by electricity, supports the driver. -
2 Forward Vehicle Dynamics
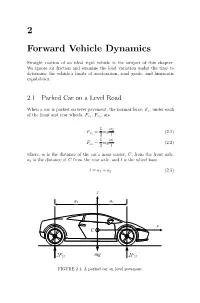
2 Forward Vehicle Dynamics Straight motion of an ideal rigid vehicle is the subject of this chapter. We ignore air friction and examine the load variation under the tires to determine the vehicle’s limits of acceleration, road grade, and kinematic capabilities. 2.1 Parked Car on a Level Road When a car is parked on level pavement, the normal force, Fz, under each of the front and rear wheels, Fz1 , Fz2 ,are 1 a F = mg 2 (2.1) z1 2 l 1 a F = mg 1 (2.2) z2 2 l where, a1 is the distance of the car’s mass center, C,fromthefrontaxle, a2 is the distance of C from the rear axle, and l is the wheel base. l = a1 + a2 (2.3) z a2 a1 x C 2Fz2 mg 2Fz1 FIGURE 2.1. A parked car on level pavement. 40 2. Forward Vehicle Dynamics Proof. Consider a longitudinally symmetrical car as shown in Figure 2.1. It can be modeled as a two-axel vehicle. A symmetric two-axel vehicle is equivalent to a rigid beam having two supports. The vertical force under the front and rear wheels can be determined using planar static equilibrium equations. Fz =0 (2.4) XMy =0 (2.5) Applying the equilibrium equationsX 2Fz +2Fz mg =0 (2.6) 1 2 − 2Fz a1 +2Fz a2 =0 (2.7) − 1 2 provide the reaction forces under the front and rear tires. 1 a2 Fz1 = mg 2 a1 + a2 1 a = mg 2 (2.8) 2 l 1 a1 Fz2 = mg 2 a1 + a2 1 a = mg 1 (2.9) 2 l Example 39 Reaction forces under wheels. -

2014 Nissan Altima Sedan | Owner's Manual
2014 NISSAN ® ALTIMA SEDAN 2014 ALTIMA SEDAN OWNER’S MANUAL L33-D Printing : June 2013 (06) Publication No.: OM0EOM14E 0L32U2 0L33U0 For your safety, read carefully and keep in this vehicle. Printed in U.S.A. L33-D FOREWORD READ FIRST—THEN DRIVE SAFELY Welcome to the growing family of new NISSAN In addition to factory installed options, your ve- Before driving your vehicle, please read this owners. This vehicle is delivered to you with hicle may also be equipped with additional ac- Owner’s Manual carefully. This will ensure famil- confidence. It was produced using the latest cessories installed by NISSAN or by your iarity with controls and maintenance require- techniques and strict quality control. NISSAN dealer prior to delivery. It is important ments, assisting you in the safe operation of your that you familiarize yourself with all disclosures, vehicle. This manual was prepared to help you under- warnings, cautions and instructions concerning stand the operation and maintenance of your proper use of such accessories prior to operating WARNING vehicle so that you may enjoy many miles (kilome- the vehicle and/or accessory. See a NISSAN ters) of driving pleasure. Please read through this dealer for details concerning the particular ac- IMPORTANT SAFETY INFORMATION RE- manual before operating your vehicle. cessories with which your vehicle is equipped. MINDERS FOR SAFETY! A separate Warranty Information Booklet Follow these important driving rules to explains details about the warranties cov- help ensure a safe and comfortable trip ering your vehicle. The “NISSAN Service for you and your passengers! and Maintenance Guide” explains details ● NEVER drive under the influence of al- about maintaining and servicing your ve- cohol or drugs. -
“I Hate This Chair!” Translating Common Power Wheelchair Challenges Into Practice Solutions
“I Hate This Chair!” Translating Common Power Wheelchair Challenges into Practice Solutions Emma M. Smith, MScOT, ATP/SMS Brenlee Mogul-Rotman, OT, ATP/SMS Tricia Garven, MPT, ATP PhD Candidate, Rehab Sciences National Clinical Education Manager Regional Clinical Education Manager University of British Columbia Permobil Canada Permobil USA 34th International Seating Symposium Westin Bayshore, Vancouver, Canada March 6, 2018 Disclosure Emma Smith has no affiliations, financial or otherwise, to disclose. Brenlee Mogul-Rotman and Tricia Garven are employees of Permobil Inc. Overview • Introductions • Drive Configuration • Seating and Positioning • Drive Controls • Proportional v. Non-Proportional • Programming Parameters • Clinical Relevance • Case Study Stations (4) • Discussion and wrap-up Getting to know you… http://etc.ch/7anN Drive Configuration And how it impacts your clients.. Selecting the most appropriate wheelchair base 1. Understanding Consumer’s Needs 2. Objectively Compare and Contrast Features of Power Wheelchair • Goals and Lifestyle Bases • Environment and • Real life information Transportation • Realistic expectation • Medical Issues Rear-Wheel Drive (RWD) – general perceptions • Good tracking for higher speeds • Most sensitive to changes in weight distribution • Typically has good suspension • Obstacle climbing – needs to be straight on • Front swiveling casters • LE positioning/stand pivot transfers • Largest Turning Radius Mid-Wheel Drive (MWD) – general perceptions • Good stability for power seating • Intuitive Driving -

Drive Train Selection
Selecting the best drivetrains for your fleet vehicles Drivetrain Basics FWD RWD AWD 4WD Front-wheel drive Rear-wheel drive All-wheel drive (AWD) 4WD generally (FWD) is the most (RWD) is regaining vehicles drive all four requires manually common form of popularity due to wheels. AWD is used switching between engine/transmission consumer demand to market vehicles two-wheel drive for layout; the engine for performance; the that switch from two streets and a drives only the front engine drives only drive wheels to four four-wheel drive for wheels. the rear wheels. as needed. low traction areas. Two-wheel drive (2WD) is used to describe vehicles able to power two wheels at most. For vehicles with part-time four-wheel drive (4WD), the term refers to the mode when 4WD is deactivated and power is applied to only two wheels. Sedans | Minivans | Crossovers Pickups | Full-Size Vans | SUVs Generally FWD, RWD and AWD Generally 2WD and 4WD Element Fleet Management ® Acquisition Cost FWD RWD AWD 2WD 4WD FWD less expensive RWD can be more AWD generally most due to fewer expensive due to more expensive due to more 4WD is more expensive than 2WD due to components and more components and parts than FWD and heavier-duty components efficient manufacturing additional time to RWD assemble Select vehicles based on intended function and operating environment rather than acquisition cost, as these factors largely dictate operating costs Operating Expenses: Fuel Efficiency FWD RWD AWD 2WD 4WD FWD more efficient More parts for RWD More parts for AWD 2WD gets better -

LPG In-Service Vehicle Emissions Study in Australia
MOTOR VEHICLE POLLUTION IN AUSTRALIA Supplementary Report No. 1 LPG In-Service Vehicle Emissions Study prepared by the NSW Environment Protection Authority for Environment Australia & Federal Office of Road Safety May 1997 GPO Box 594 Tel: +61 6 274 7111 Canberra ACT 2601 Fax: +61 6 274 7714 Australia ACKNOWLEDGMENTS Environment Australia commissioned the NSW EPA to undertake the LPG In-service Vehicle Emissions Study. The Federal Office of Road Safety was responsible for overall financial and project management of the Study. The NSW EPA Project Team wishes to acknowledge the considerable support given by a number of organisations over the duration of the study. Particular thanks are extended to the following contributors: · the thirteen householders who entrusted their private vehicles to the emissions laboratories for testing; · ALPGA, for providing advice on technical matters, supplying information on the LPG vehicle fleet characteristics and arranging industry support through the coordination of its members; · DASFleet, for providing new-model ‘replacement’ vehicles at nominal rates for use by the private vehicle owners who agreed to let us test their cars; · ELGAS Ltd., for supplying and delivering the test fuel (free of charge) to both laboratories; · NSW Taxi Council and the Victorian Taxi Council for assisting with arrangements to test a variety of taxis from a number of the members; · NRMA Limited, for providing comprehensive insurance coverage for all ‘replacement’ vehicles and for the provision of roadside service coverage -

Commercial Driver's License Manual
Commercial Driver License Manual 2005 CDL Testing System Version: July 2017 CDL Driver’s Manual COPYRIGHT © 2005 AAMVA All Rights Reserved This material is based upon work supported by the Federal Motor Carrier Safety Administration under Cooperative Agreement No. DTFH61-97-X-00017. Any opinions, findings, conclusions or recommendations expressed in this publication are those of the Author(s) and do not necessarily reflect the view of the Federal Motor Carrier Safety Administration. COPYRIGHT © 2005 AAMVA. All rights reserved This material has been created for and provided to State Driver License Agencies (SDLAs) by AAMVA for the purpose of educating Driver License applicants (Commercial or Non-Commercial). Permission to reproduce, use, distribute or sell this material has been granted to SDLAs only. No part of this book may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying, recording, or by any information storage and retrieval system without express written permission from the author / publisher. Any unauthorized reprint, use, distribution or sale of this material is prohibited. Human trafficking is modern-day slavery. Traffickers use force, fraud and coercion to control their victims. Any minor engaged in commercial sex is a victim of human trafficking. Trafficking can occur in many locations, including truck stops, restaurants, rest areas, brothels, strip clubs, private homes, etc. Truckers are the eyes and the ears of our nation’s highways. If you see a minor working any of those areas or suspect pimp control, call the National Hotline and report your tip: 1-888-3737-888 (US) 1-800-222-TIPS (Canada) For law enforcement to open an investigation on your tip, they need “actionable information.” Specific tips helpful when reporting to the hotline would include: Descriptions of cars (make, model, color, license plate number, etc.) and people (height, weight, hair color, eye color, age, etc.) Take a picture if you can. -

Keyways for Drive Wheels & Custom Specials Wheels
Wheels: Keyways for Drive wheels & Custom Specials Durable Superior Casters® Drive wheels can be made out of a variety of steel core wheels; most drive wheels have a molded tread (Polyurethane or Rubber) for traction, to grab and drive the desired materials. A Keyway is a machined notch in a wheel bore allowing the wheel to be locked onto a drive shaft using a “key” that slides into correlating notches between the wheel bore and a drive shaft, the shaft is then able turn or drive the wheel. Keyways can be machined into steel wheel bores with sufficient material thickness; sleeves can also be pressed into wheel bores to provide a keyway for smaller shaft sizes and are anchored by the means of set screws. Due to the stress & friction associated with drive wheel application, wheel capacities will be reduced by 50% and tread life of Polyurethane & Rubber will be shorter depending on speed, weight and duration of driving activity. Normal warranties do not apply to any drive wheels other than guaranteeing specification characteristics. Below chart shows guidelines for standard dimensions, actual part numbers may vary according to desired dimensions. Some wheel bores / shaft sizes and keyway configurations may not be available for certain wheel diameters, tread width and materials, please inquire with our customer service or engineering department for details. Standard Keyways, Key O.D. Sizes & Set Screws Wheel Bore or Diameter of Keyway **Keyway Part# **Keyway Part# with *Shaft. Use plain bore part# for *Key O.D. **Keyway Part# with 1 Set Screw 2 Set Screws (1 over standard sizes, please contact us Width Depth Dimensions. -

Influence of In-Wheel Motors on the Ride Comfort of Electric Vehicles
Influence of in-wheel motors on the ride comfort of electric vehicles R. Vos D&C 2010.041 Master’s thesis Coach(es): dr.ir. I.J.M. Besselink Supervisor: prof.dr. H. Nijmeijer Eindhoven University of Technology Department of Mechanical Engineering Dynamics & Control Eindhoven, July, 2010 Acknowledgements I would like to thank my supervisors, dr.ir. I.J.M. Besselink and prof.dr. H. Nijmeijer, for giving me the opportunity to work on this interesting subject and for their valuable advice and guidance throughout the project. I am grateful to Erwin Meinders, Paul van Oorschot and Toon van Gils for their aid and assistance during the experiments. Finally, I would like to thank my family, my girlfriend and all my friends for their support and encourage- ment to make this achievement possible. i ii Acknowledgements Abstract This report describes the influence of in-wheel motors on the ride comfort and road holding of electric ve- hicles. To this end, on-road experiments are performed using an ICE vehicle and simulations are performed with a model representing a battery electric vehicle. The experiments and simulations are performed by adding a mass of 15 kg to each individual wheel. This is determined based on the assumption that the ve- hicle has to be equipped with drive motors that have a combined power of 30 kW in order to overcome the road load during normal driving and based on the assumption that a specific motor output of approximately 1 kW/kg can be considered to be an appropriate guideline for permanent magnet brushless dc motors. -

Overview and Prospects on Distributed Drive Electric Vehicles and Its Energy Saving Strategy
Hao LIU, Xinbo CHEN, Xinjian WANG Department of Electric Drive System, Clean Energy Vehicle Engineering Centre, Tongji University Overview and Prospects on Distributed Drive Electric Vehicles and Its Energy Saving Strategy Abstract. Significant research has been directed towards developing the electric vehicle (EV) to reduce the energy consumption and exhaust emissions. Focusing on the distributed drive electric vehicles (DDEVs) offering flexible chassis arrangement and brief drive lines, this paper gives an overview about the basic topologies and characteristics. The energy saving strategy to increase driving range is also discussed. Existing problems and prospects for future research on improvements of topologies, optimized torque distribution and drive system efficiency are analysed as well. Streszczenie. W artykule zaprezentowano przegląd wiedzy na temat nowej generacji samochodów elektrycznych – samochodów z wieloma napędami elektrycznymi – DDEV (distributed drive electric vehicles). Omówiono topologię i charakterystyki tego typu pojazdów oraz strategie oszczędności energii. (Nowa generacja samochodów elektrycznych z wieloma napędami – DDEV (distributed drive electric vehicles)) Keywords: distributed drive electric vehicles, topologies, torque distribution, efficiency. Słowa kluczowe: pojazdy elektryczne, pojazdy DDEV Introduction Sequel’s “Electric AWD” architecture [13-15], which has a Along with the development of the society and the single electric motor (60kw) to drive the front wheels and in- science technology, not only has vehicle become the wheel motors (2*25kw) to drive each of the rear wheels, indispensable transportation in people’s daily life but also makes the total power up to 110 kW. And with fuel cell and has led to excess energy consumption and environmental high voltage lithium ion battery system, Sequel provides contamination, which attracts much more concerns of the satisfying acceleration ability and driving range for more world. -

Analysis of Wheel Hub Motor Drive Application in Electric Vehicles
100 MATEC Web of Conferences , 01004 (2017)DOI: 10.1051/matecconf/201 710001004 GCMM 2016 Analysis of Wheel Hub Motor Drive Application in Electric Vehicles Yuechao Sun*, Man Li and Cong Liao Mechanical and Electrical Engineering Department, Lingnan Normal University, Zhanjiang 524048 , China Corresponding Email: [email protected] Abstract. Based on the comparative analysis of the performance characteristics of centralized and distributed drive electric vehicles, we found that the wheel hub motor drive mode of the electric vehicles with distributed drive have compact structure, high utilization ratio of interior vehicle space, lower center of vehicle gravity, good driving stability, easy intelligent control and many other advantages, hence in line with the new requirements for the development of drive performance of electric vehicles, and distributed drive will be the ultimate mode of electric vehicles in the future. Keywords Electric Vehicle, Drive Mode, Wheel Hub Motor, Development Analysis. 1 Foreword Compared with conventional vehicles, electric vehicles have the advantages of high efficiency of energy conversion, low noise, zero emission, etc., and the load-carrying property and wide range speed control characteristics of motors can remove the mechanical devices such as clutch and gearbox, simplifying the structure and facilitating maintenance [1, 2]. Driven by the dual pressures of energy and environment nowadays, the world’s major automobile producing countries are developing electric vehicle industry with unprecedented efforts. Electric vehicles are creating a new pattern of the automobile industry, which will sure lead the main direction of the automobile industry development. As the core component of an electric vehicle, the quality of driving motor has a great influence on the power, economical efficiency and safety of the electric vehicle. -

Download Manual
OPERATOR’S MANUAL STHM Model: STHM-23CV Congratulations on owning a Scag mower! This manual contains the operating instructions and safety information for your Scag mower. Reading this manual can provide you with assistance in maintenance and adjustment procedures to keep your mower performing to maximum efficiency. The specific models that this book covers are listed on the inside cover. Before operating your machine, please read all the information enclosed. © 2008 PART NO. 03223 Rev. 1 Scag Power Equipment PRINTED 3/2008 Division of Metalcraft of Mayville, Inc. PRINTED IN USA WARNING FAILURE TO FOLLOW SAFE OPERATING PRACTICES MAY RESULT IN SERIOUS INJURY OR DEATH. • Read this manual completely as well as other manuals that came with your mower. • DO NOT operate on steep slopes. To check a slope, attempt to back up it (with the cutter deck down). If the machine can back up the slope without the wheels slipping, reduce speed and use extreme caution. • Under no circumstances should the machine be operated on slopes greater than 15 degrees. ALWAYS FOLLOW OSHA APPROVED OPERATION. • DO NOT mow on wet grass. Wet grass reduces traction and steering control. • Keep all shields in place, especially the grass discharge chute. • Before performing any maintenance or service, stop the machine and remove the spark plug wire and ignition key. • If a mechanism becomes clogged, stop the engine before cleaning. • Keep hands, feet and clothing away from power-driven parts. • Keep others off the mower (only one person at a time) REMEMBER - YOUR MOWER IS ONLY AS SAFE AS THE OPERATOR! HAZARD control AND accident PREVENTION ARE DEPENDENT UPON THE awareness, concern, prudence, and proper training of the personnel inVolVed in the operation, transport, MAINTENANCE, AND storage OF THE EQUIPMENT.