Link to Publication
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

DFN Mitteilungen Ausgabe 80 | Mai 2011
Deutsches Forschungsnetz Mitteilungen Ausgabe 80 | Mai 2011 www.dfn.de Mitteilungen Reine E-Mail DFN-Verein plant Dienst gegen Spam und Malware Speicherdienste im Wissenschaftsnetz Supercomputer und Exportkontrolle DFN vermittelt Hinweise zu internationalen gegenseitigen Support wissenschaftlichen Kooperationen Impressum Herausgeber: Verein zur Förderung eines Deutschen Forschungsnetzes e. V. DFN-Verein Alexanderplatz 1, 10178 Berlin Tel: 030 - 88 42 99 - 0 Fax: 030 - 88 42 99 - 70 Mail: [email protected] Web: www.dfn.de ISSN 0177-6894 Redaktion: Kai Hoelzner (kh) Fotos: Torsten Kersting Gestaltung: Labor3 | www.labor3.com Druck: Rüss, Potsdam ©DFN-Verein 05/2011 Fotonachweis: Titel © fotolia Seite 8/9 © denis cherim, fotolia Seite 38/39 © Claudiad, Istockphoto Vorwort Dr. Thomas Eickermann Abteilungsleiter Kommunikationssysteme Jülich Supercomputing Centre in der Forschungszentrum Jülich GmbH und Projekt Manager PRACE Am 25. März 2011 verstarb plötzlich und unerwartet unser langjähriger Geschäftsfüh- rer, Freund und Kollege Klaus Ullmann. Seit der Gründung des DFN-Vereins im Jahr 1984 hat sich Klaus Ullmann sehr erfolgreich für das Deutsche Forschungsnetz engagiert. Als Geschäftsführer des Deutschen For- schungsnetzes, als Chairman der europäischen Netzwerkorganisation DANTE und Vor- sitzender des GÉANT Executive Committee hat Klaus Ullmann den Aufbau einer Netz- infrastruktur für die Wissenschaft in Deutschland und Europa maßgeblich gestaltet. Sein internationales Ansehen als Wissenschaftler im Bereich der Datennetze und sein engagiertes und weitsichtiges Wirken haben das Ansehen und die Leistungsfähigkeit des Deutschen Forschungsnetzes dabei über fast drei Jahrzehnte geprägt. Kein Zweifel: Ohne Klaus Ullmann sähe die Welt der Wissenschaftsnetze heute anders aus. Das Deutsche Forschungsnetz und zu einem guten Teil auch der paneuropäische Forschungsnetz-Verbund stellen in gewisser Weise sein Lebenswerk dar, an dem er mit Teamgeist und großer Freude gewirkt hat. -

DFN Mitteilungen 64 Druck
DFN MitteilungenAusgabe 65 · Juni 2004 20 Jahre Deutsches Forschungsnetz Ein Rückblick auf die Entstehungsgeschichte des DFN Viola Testbed Ausbau und Weiterentwicklung von Netztechnologie für das X-WiN DFN-PKI Strategie Neustrukturierung der Public-Key-Infrastruktur im Deutschen Forschungsnetz Quantenkryptographie EU-Projekt zur Entwicklung sicherer Netzwerke mittels Quanten- kryptographie eröffnet neue Perspektiven der Datensicherheit INHALT VORWORT 20 Jahre Deutsches Forschungsnetz 3 Prof. Dr. Eike Jessen, Vorsitzender des DFN-Vereins SPEZIAL „20 JAHRE DFN“ Ein Blick zurück, einmal ohne Zorn 4 Zum 20-jährigen Bestehen des DFN-Vereins Peter Grosse FORSCHUNG UND Testbed Viola 7 ENTWICKLUNG Ausbau und Weiterentwicklung von Netztechnologie für das X-WiN Dr. Peter Kaufmann Search’n Share mit DFN Science-To-Science 11 Erste Erfahrungen mit Peer-To-Peer-Suchtechnologie für die Wissenschaft Ron Wertlen NETZE UND Trends in der Quantenkryptographie 13 NETZTECHNIK EU-Projekt zur Entwicklung sicherer Netzwerke mittels Quantenkryptographie eröffnet neue Perspektiven der Datensicherheit Kai Hoelzner, Jens Nestvogel SERENATE 16 Europäische Forschungsnetze Heute und Morgen Jens Nestvogel Technologien für optische Netzwerke 18 Dr. Ing. Georges E. Mityko IMPRESSUM Herausgeber Verein zur Förderung eines SICHERHEIT DFN-PKI-Strategie 23 Deutschen Forschungsnetzes e.V. Neustrukturierung der Public-Key-Infrastruktur im – DFN-Verein – Deutschen Forschungsnetz Stresemannstr. 78, 10963 Berlin Dr. Marcus Pattloch Tel 030 - 88 42 99 - 24 Fax 030 - 88 42 99 - 70 -

Seismic Risk Mapping for Germany
Nat. Hazards Earth Syst. Sci., 6, 573–586, 2006 www.nat-hazards-earth-syst-sci.net/6/573/2006/ Natural Hazards © Author(s) 2006. This work is licensed and Earth under a Creative Commons License. System Sciences Seismic risk mapping for Germany S. Tyagunov1,3, G. Grunthal¨ 2, R. Wahlstrom¨ 2,3, L. Stempniewski1, and J. Zschau2 1University of Karlsruhe (TH), Kaiserstrasse 12, 76128 Karlsruhe, Germany 2GeoForschungsZentrum Potsdam, Telegrafenberg, 14473 Potsdam, Germany 3Center for Disaster Management and Risk Reduction Technology (CEDIM), Am Fasanengarten, 76128 Karlsruhe, Germany Received: 12 January 2006 – Revised: 20 April 2006 – Accepted: 20 April 2006 – Published: 29 June 2006 Abstract. The aim of this study is to assess and map the part of the country is related to earthquake prone zones with seismic risk for Germany, restricted to the expected losses shallow foci. These have impact on the disaster preparedness of damage to residential buildings. There are several earth- and risk mitigation activities. Destructive seismic events are quake prone regions in the country which have produced Mw infrequent, however. The past seismic history (Table 1) has magnitudes above 6 and up to 6.7 corresponding to observed manifested the serious threat from earthquakes. Current esti- ground shaking intensity up to VIII–IX (EMS-98). Com- mates relate about one quarter of the total area of the country, bined with the fact that some of the earthquake prone areas with about one third of the population, to zones where the are densely populated and highly industrialized and where level of seismic intensity is degree VI (which corresponds to therefore the hazard coincides with high concentration of ex- slight damage to normal buildings) or higher with a proba- posed assets, the damaging implications from earthquakes bility of non-exceedence of 90% in 50 years, i.e., the hazard must be taken seriously. -

In-Grid – Engineering Applications
This publication gives a detailed overview of the current Heike Neuroth, Martina Kerzel, state of the German Grid Initative with emphasis on the long-term strategic grid research and development activities and Wolfgang Gentzsch (Ed.) for academia and industry. German Grid Initiative BauVOGrid German Grid Iniative Iniative Grid German (Ed.) WIKINGER Im Wissensnetz Vernetzte Informationsprozesse in Foschungsverbünden Wolfgang Gentzsch Wolfgang and and Heike Neuroth, Martina Kerzel, Kerzel, Martina Neuroth, Heike ISBN 978-3-938616-99-4 Universitätsverlag Göttingen Universitätsverlag Göttingen Heike Neuroth, Martina Kerzel, and Wolfgang Gentzsch (Ed.) German Grid Initiative D-Grid, September 2007 Except where otherwise noted, this work is licensed under a Creative Commons License published by Universitätsverlag Göttingen 2007 Heike Neuroth, Martina Kerzel, and Wolfgang Gentzsch (Ed.) German Grid Initiative D-Grid Universitätsverlag Göttingen 2007 Bibliographical information of the German National Library This publication is recorded by the German National Library; detailed bibliographical data are available here: <http://dnb.ddb.de>. Printed with financial support of the Federal Ministry of Education and Research (BMBF). This work is protected by the German Intellectual Property Right Law. It is also available as an Open Access version through the pub- lisher’s homepage and the Online Catalogue of the State and Univer- sity Library of Göttingen (http://www.sub.uni-goettingen.de). Users of the free online version are invited to read, download and distribute it under the licence agreement shown in the online version. Users may also print a small number for educational or private use. However, they may not sell print versions of the online book. The electronic version of this document is available at these persistent identifiers: urn:nbn:de:gbv:7-webdoc-1521-2 (Resolving with http://www.nbn-resolving.de/) and http://resolver.sub.uni-goettingen.de/purl/?webdoc-1521-2 This publication is also available in German (ISBN: 978-3-940344-01-4). -

Professor H. Edward Seidel, Vice President for Economic Development and Innovation
Professor H. Edward Seidel, Vice President for Economic Development and Innovation Rev. Oct 2019 346 Henry Admin Building, MC-356 506 S Wright St Urbana Illinois 61801 Phone: +1 (217) 265-5440 (work) e-mail: [email protected] (work) +1 (225) 302-0612 (mobile) [email protected] (personal) CURRENT University of Illinois (2016 - ). Vice President for Economic Development and Innovation POSITIONS (VPEDI) (Also previously VP for Research); Founder Professor, Department of Physics, Professor, Departments of Astronomy and Computer Science, Institute for Sustainability, Energy, and Environment (iSEE), UIUC; Senior Research Scientist (former Director), National Center for Supercomputing Applications (NCSA). Leader of the Illinois Innovation Network (IIN), an academic consortium of 15 sites, including the Discovery Partners Institute and all 4-year public universities in Illinois. PREVIOUS Founding Interim Director, Discovery Partners Institute (DPI), Oct 2017 – Aug 2018. SENIOR Initiated, conceived, and spearheaded a new billion-dollar interdisciplinary campus of the POSITIONS University of Illinois System and other partners worldwide until it could be launched with a full-time director in 2018. I continue to oversee DPI in my VPEDI role. Director, National Center for Supercomputing Applications (NCSA), January 2014 – May 2017 (concurrent with above); Directed leading national center for applications of scientific computing and interdisciplinary research and education. Founder Professor of Physics, Professor of Astronomy, University of Illinois, Urbana-Champaign, January 2014 – present. Senior Vice-President for Research and Innovation and Professor, Skolkovo Institute of Science and Technology, Moscow, Russia, September, 2012 – Jan 2014. The senior academic leader to build a new, private university in Russia in collaboration with the Massachusetts Institute of Technology and the Russian Federation. -
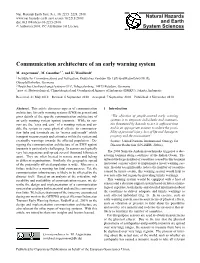
Communication Architecture of an Early Warning System
Nat. Hazards Earth Syst. Sci., 10, 2215–2228, 2010 www.nat-hazards-earth-syst-sci.net/10/2215/2010/ Natural Hazards doi:10.5194/nhess-10-2215-2010 and Earth © Author(s) 2010. CC Attribution 3.0 License. System Sciences Communication architecture of an early warning system M. Angermann1, M. Guenther2,*, and K. Wendlandt1 1Institute for Communications and Navigation, Deutsches Zentrum fur¨ Luft- und Raumfahrt (DLR), Oberpfaffenhofen, Germany 2Deutsches GeoForschungsZentrum GFZ, Telegrafenberg, 14473 Potsdam, Germany *now at: Meteorological, Climatological and Geophysical Agency of Indonesia (BMKG), Jakarta, Indonesia Received: 21 May 2010 – Revised: 6 September 2010 – Accepted: 7 September 2010 – Published: 2 November 2010 Abstract. This article discusses aspects of communication 1 Introduction architecture for early warning systems (EWS) in general and gives details of the specific communication architecture of “The objective of people-centred early warning an early warning system against tsunamis. While its sen- systems is to empower individuals and communi- sors are the “eyes and ears” of a warning system and en- ties threatened by hazards to act in sufficient time able the system to sense physical effects, its communica- and in an appropriate manner to reduce the possi- tion links and terminals are its “nerves and mouth” which bility of personal injury, loss of life and damage to transport measurements and estimates within the system and property and the environment”. eventually warnings towards the affected population. De- Source: United Nations International Strategy for signing the communication architecture of an EWS against Disaster Reduction (UN-ISDR, 2006a). tsunamis is particularly challenging. Its sensors are typically very heterogeneous and spread several thousand kilometers The 2004 Sumatra-Andaman earthquake triggered a dev- apart. -
Biennial 2004 05 Engl FINAL.Indd
Report Report by the Managing Director This report surveys the activities of the Max Planck Institute for Gravi- tational Physics (Albert Einstein Institute, AEI) in the years 2004 and 2005. The 10th anniversary of our institute last year and the coinciding 100th anniversary of Einstein’s annus mirabilis has focused attention of both the scientifi c community and the general public onto the re- search areas of the institute: From the geometrical and analytical as- pects of General Relativity, String Theory and other unifi ed theories to the astrophysics of gravitational waves and to the laser interferometry and quantum optics used to detect them, Einstein’s heritage is present in much of the current research of the institute. The two years covered by this report have seen scientifi c advances in all sections of the institute that are detailed in the reports of the individual sections. They have also brought a further strengthening of the international role and recognition of the institute: We are very pleased that several recipients of prizes from the Alexander von Hum- boldt Foundation chose the AEI as host institution for their research. I also mention the conference on “Geometry and Physics after 100 years of Einstein’s Relativity” in Golm in April 2005 where a distinguished group of speakers covered all aspects of gravitation in front of an in- ternational audience of leading researchers and younger scientists, see the detailed report in this volume. Several specifi c new developments have taken shape. The Internation- al Max Planck Research School in “Geometric Analysis, Gravitation and String Theory” has already attracted many new graduate students from around the world to the AEI and the participating university re- search groups. -

Otsdam Nstitut Für Limafolgenforschung Weijahresbericht
zwjb2002-03d.book Page 1 Friday, July 23, 2004 11:16 PM OTSDAM NSTITUT FÜR LIMAFOLGENFORSCHUNG WEIJAHRESBERICHT zwjb2002-03d.book Page 2 Friday, July 23, 2004 11:16 PM Impressum Herausgeber Potsdam-Institut für Klimafolgenforschung e. V. (PIK) Postadresse Postfach 601203 14412 Potsdam Deutschland Besucheradresse Telegrafenberg 14473 Potsdam Deutschland Telefon +49-(0)331-288-2500 Fax +49-(0)331-288-2600 E-Mail [email protected] Internet http://www.pik-potsdam.de Projektleitung Rupert Klein, Heike Zimmermann-Timm Redaktion Anja Wirsing, Heike Zimmermann-Timm Technische Leitung Dietmar Gibietz-Rheinbay Layout Dietmar Gibietz-Rheinbay (Produktion), Ursula Werner (Produktionsassistenz), Anja Wirsing (Konzept) Assistenz Gabriele Dress, Johann Grüneweg, Gesine Herzog, Ulrike Koch, Michael Lüken, Alison Schlums Druck neue odersche Verlag und Medien GmbH Bildnachweise Titelbilder Titel, Vorderseite: Pol de Limbourg, “Très Riches Heures du duc de Berry”, August: Hawking, vellum, 15th Century, Calendrier, Ms. 65/1284 f.8v, Musée Condé, Chantilly, France, © Giraudon/Brigdeman Art Library. Titel, Rückseite: Pol de Limbourg, “Très Riches Heures du duc de Berry”, April: Courtly Figures in the Castle Grounds, vellum, 15th Century, Calendrier, Ms. 65/1284 f.4v. Musée Condé, Chantilly, France, © Giraudon/Bridgeman Art Library. Abbildungen Alle Abbildungen sind von PIK-Wissenschaftlern oder stammen aus Publikationen, an denen PIK-Wissenschaftler beteiligt waren. Die Fotos und Fotomanipulationen auf den Seiten 9/49/57/61/65/73/77/83/89/97 wurden von Hannah Förster (www.photorealistica.net) für den Bericht zur Verfügung gestellt. Fotos S. 5/11/17/21/25/29/33/37/56/59/63-64/79/85/86 Matthias Krüger (www.matthias-krueger-fotografie.de), S. -

Niko Marcel Waesche Submitted for the Ph.D
Global Opportunity and National Political Economy: The Development of Internet Ventures in Germany Niko Marcel Waesche Submitted for the Ph.D. Degree (80,113 words, without appendices) International Relations Department The London School of Economics and Political Science University of London May 2001 Corrected November 2oo1 UMI Number: U161968 All rights reserved INFORMATION TO ALL USERS The quality of this reproduction is dependent upon the quality of the copy submitted. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if material had to be removed, a note will indicate the deletion. Dissertation Publishing UMI U161968 Published by ProQuest LLC 2014. Copyright in the Dissertation held by the Author. Microform Edition © ProQuest LLC. All rights reserved. This work is protected against unauthorized copying under Title 17, United States Code. ProQuest LLC 789 East Eisenhower Parkway P.O. Box 1346 Ann Arbor, Ml 48106-1346 ~ fl4 £ S £ S F 7938 Vs * OF pOLVF'C^L, * ano M> ‘‘W # SZ+if Abstract In the late 1990s, the internet was heralded as a global opportunity for new ventures. One aspect of this opportunity was the innovation of including small firms and consumers in seamless ‘business webs.’ The second aspect was the distance insensitivity and intemationality of the internet. New ventures appeared in different countries responding to this seemingly global opportunity. In Germany, this response appeared especially strong against the background of years of slow development of the domestic information technology (IT) sector. This thesis examines the role of national government policy in a world being transformed by technology.