Microcontrollers for Ham Radio Part 1 - BASIC Stamp by Terry G
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Parallax 2004 Fall Product Guide Is Brought to You by Parallax, Inc
www.parallax.com The Parallax 2004 Fall Product Guide is brought to you by Parallax, Inc. and our network of 70+ distributors. This product guide is unique from all of our previous guides since the pricing is not published next to the Parallax part number and product description. Parallax, Inc. 599 Menlo Drive, #100 For pricing information, please visit your Rocklin, CA 95765, USA distributor’s web site or view the included price list (may not be applicable). Telephone: Office/Sales/Support: (916) 624-8333 The following 30 pages focus on Parallax’s Fax: (916) 624-8003 core products, including those which are most often carried by distributors. This includes Callers in the United States only: but is not limited to the following: BASIC Toll-Free Sales: 888-512-1024 Stamp microcontrollers, Programming Boards, Toll-Free Technical Support: 888-99-STAMP Starter Kits, Application Modules, Accessories, Robotics, Motor Control, Education Stamps Please Note: Sales Department, Technical in Class, Industrial, SX-Key Programming Support, and General Office hours are Monday Tools and Chips, Altera FPGA Development through Friday from 7:00 a.m. to 5:00 p.m., Tools. Additional accessories and components Pacific Standard Time. may be available from your distributor or www.parallax.com. Internet: www.parallax.com Our distributors are very responsive to customer requests and are able to procure E-mail: Parallax products that are available from our [email protected] web site. For international customers, this is [email protected] of extreme importance since distributors use [email protected] their expertise to provide you with the best pricing available after paying for overseas BASIC Stamp, Board of Education, Stamps shipping charges, duties, and taxes. -

BASIC Stamp Homework Board (Serial); Single #555-28158, 10
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 BASIC Stamp® HomeWork Board™ (Serial) Single (#555-28158) or 10-pack (#28158) This economical development platform with a surface-mount BASIC Stamp 2 microcontroller module was designed with beginners and student budgets in mind; the 10-pack perfect for outfitting a classroom. It is compatible with What’s a Microcontroller?, Robotics with the Boe-Bot, and most other Stamps in Class tutorials. See the Program Overview link at www.parallax.com/education for complete details. Features Key Specifications Built-in, surface-mount BASIC Stamp 2 Power requirements: 9 V battery; BS2 microcontroller requires 7 mA running, 50 µA in sleep BASIC Stamp I/O pins plus power Communication: Serial (RS-232) via DB9 connections are brought adjacent to a Operating temperature: 32 to 158 °F 2" x 1 3/8" breadboard. (0 to 70 °C) Built-in 220-ohm series resistors Dimensions: 3.05 x 4 in between the I/O pins and breadboard (7.75 x 10.16 cm) for a bit of protection in case of wiring errors Additional Items Required On-board regulator delivers up to 500 Serial cable (#800-00003) — OR — mA* of current for BS2 and breadboard USB to Serial Adapter with USB A to circuits (see Rev B note, page 3) Mini-B cable (#28031) LED connected to the BS2’s EEPROM 9 V battery clock line shows when a program is running PC running Windows 2K/XP/Vista/7 for the BASIC Stamp Editor software. -

OEM-BS2 – Rev A2 (#27290/#27291) □ 27290 – Assembled □ 27291 – Kit
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 OEM-BS2 – Rev A2 (#27290/#27291) □ 27290 – Assembled □ 27291 – Kit Assembly Instructions This document is a guide that will aid you in the assembly of your OEM-BS2 Rev A2. It is assumed that you have the proper equipment and possess the skills necessary to safely assemble electronic components. Generally, it is best to start with the lower profile components and then work your way to the tallest components. This is often true because in tight places lower profile components are more difficult to get at with taller components in the way. 1. The three lowest profile components on the board are the 4.7K resistors and the 10K resistor. These resistors should have color bands around them that signify their value. The color band pattern for the 4.7K resistors should be: Yellow, Violet, Red and Gold. The color band pattern for the 10K resistor should be: Brown, Black, Orange and Gold. Resistors are polarity insensitive, which means that it doesn’t matter which end goes where. Install the 4.7K resistors where designated by ‘R1’ and ‘R2’, and the 10K resistor where designated by 'R3'. 2. The next lowest profile component on the board is the 20-pin right angle SIP header. It may seem ambiguous as to which side is inserted into the PCB. The side with the angle should be inserted into the PCB as shown in the drawing to the right. -

Short Range Object Detection and Avoidance
Short Range Object Detection and Avoidance N.F. Jansen CST 2010.068 Traineeship report Coach(es): dr. E. García Canseco, TU/e dr. ing. S. Lichiardopol, TU/e ing. R. Niesten, Wingz BV Supervisor: prof.dr.ir. M. Steinbuch Eindhoven University of Technology Department of Mechanical Engineering Control Systems Technology Eindhoven, November, 2010 Abstract The scope of this internship is to investigate, model, simulate and experiment with a sensor for close range object detection for the purpose of the Tele-Service Robot (TSR) robot. The TSR robot will be implemented in care institutions for the care of elderly and/or disabled. The sensor system should have a supporting role in navigation and mapping of the environment of the robot. Several sensors are investigated, whereas the sonar system is the optimal solution for this application. It’s cost, wide field-of-view, sufficient minimal and maximal distance and networking capabilities of the Devantech SRF-08 sonar sensor is decisive to ultimately choose this sensor system. The positioning, orientation and tilting of the sonar devices is calculated and simulations are made to obtain knowledge about the behavior and characteristics of the sensors working in a ring. Issues surrounding the sensors are mainly erroneous ranging results due to specular reflection, cross-talk and incorrect mounting. Cross- talk can be suppressed by operating in groups, but induces the decrease of refresh rate of the entire robot’s surroundings. Experiments are carried out to investigate the accuracy and sensitivity to ranging errors and cross-talk. Eventually, due to the existing cross-talk, experiments should be carried out to decrease the range and timing to increase the refresh rate because the sensors cannot be fired more than only two at a time. -

Architecture of 8051 & Their Pin Details
SESHASAYEE INSTITUTE OF TECHNOLOGY ARIYAMANGALAM , TRICHY – 620 010 ARCHITECTURE OF 8051 & THEIR PIN DETAILS UNIT I WELCOME ARCHITECTURE OF 8051 & THEIR PIN DETAILS U1.1 : Introduction to microprocessor & microcontroller : Architecture of 8085 -Functions of each block. Comparison of Microprocessor & Microcontroller - Features of microcontroller -Advantages of microcontroller -Applications Of microcontroller -Manufactures of microcontroller. U1.2 : Architecture of 8051 : Block diagram of Microcontroller – Functions of each block. Pin details of 8051 -Oscillator and Clock -Clock Cycle -State - Machine Cycle -Instruction cycle –Reset - Power on Reset - Special function registers :Program Counter -PSW register -Stack - I/O Ports . U1.3 : Memory Organisation & I/O port configuration: ROM RAM - Memory Organization of 8051,Interfacing external memory to 8051 Microcontroller vs. Microprocessors 1. CPU for Computers 1. A smaller computer 2. No RAM, ROM, I/O on CPU chip 2. On-chip RAM, ROM, I/O itself ports... 3. Example:Intel’s x86, Motorola’s 3. Example:Motorola’s 6811, 680x0 Intel’s 8051, Zilog’s Z8 and PIC Microcontroller vs. Microprocessors Microprocessor Microcontroller 1. CPU is stand-alone, RAM, ROM, I/O, timer are separate 1. CPU, RAM, ROM, I/O and timer are all on a single 2. designer can decide on the chip amount of ROM, RAM and I/O ports. 2. fix amount of on-chip ROM, RAM, I/O ports 3. expansive 3. for applications in which 4. versatility cost, power and space are 5. general-purpose critical 4. single-purpose uP vs. uC – cont. Applications – uCs are suitable to control of I/O devices in designs requiring a minimum component – uPs are suitable to processing information in computer systems. -
SERVO MAGAZINE TEAM DARE’S ROBOT BAND • RADIO for ROBOTS • BUILDING MAXWELL June 2012 Full Page Full Page.Qxd 5/7/2012 6:41 PM Page 2
0 0 06 . 7 4 $ A D A N A C 0 5 . 5 $ 71486 02422 . $5.50US $7.00CAN S . 0 U CoverNews_Layout 1 5/9/2012 3:21 PM Page 1 Vol. 10 No. 6 SERVO MAGAZINE TEAM DARE’S ROBOT BAND • RADIO FOR ROBOTS • BUILDING MAXWELL June 2012 Full Page_Full Page.qxd 5/7/2012 6:41 PM Page 2 HS-430BH HS-5585MH HS-5685MH HS-7245MH DELUXE BALL BEARING HV CORELESS METAL GEAR HIGH TORQUE HIGH TORQUE CORELESS MINI 6.0 Volts 7.4 Volts 6.0 Volts 7.4 Volts 6.0 Volts 7.4 Volts 6.0 Volts 7.4 Volts Torque: 57 oz-in 69 oz-in Torque: 194 oz-in 236 oz-in Torque: 157 oz-in 179 oz-in Torque: 72 oz-in 89 oz-in Speed: 0.16 sec/60° 0.14 sec/60° Speed: 0.17 sec/60° 0.14 sec/60° Speed: 0.20 sec/60° 0.17 sec/60° Speed: 0.13 sec/60° 0.11 sec/60° HS-7950THHS-7950TH HS-7955TG HS-M7990TH HS-5646WP ULTRA TORQUE CORELESS HIGH TORQUE CORELESS MEGA TORQUE HV MAGNETIC ENCODER WATERPROOF HIGH TORQUE 6.0 Volts 7.4 Volts 4.8 Volts 6.0 Volts 6.0 Volts 7.4 Volts 6.0 Volts 7.4 Volts Torque: 403 oz-in 486 oz-in Torque: 250 oz-in 333 oz-in Torque: 500 oz-in 611 oz-in Torque: 157 oz-in 179 oz-in Speed: 0.17 sec/60° 0.14 sec/60° Speed: 0.19 sec/60° 0.15 sec/60° Speed: 0.21 sec/60° 0.17 sec/60° Speed: 0.20 sec/60° 0.18 sec/60° DIY Projects: Programmable Controllers: Wild Thumper-Based Robot Wixel and Wixel Shield #1702: Premium Jumper #1336: Wixel programmable Wire Assortment M-M 6" microcontroller module with #1372: Pololu Simple Motor integrated USB and a 2.4 Controller 18v7 GHz radio. -
Process Control
Process Control Student Guide VERSION 1.0 WARRANTY Parallax Inc. warrants its products against defects in materials and workmanship for a period of 90 days from receipt of product. If you discover a defect, Parallax Inc. will, at its option, repair or replace the merchandise, or refund the purchase price. Before returning the product to Parallax, call for a Return Merchandise Authorization (RMA) number. Write the RMA number on the outside of the box used to return the merchandise to Parallax. Please enclose the following along with the returned merchandise: your name, telephone number, shipping address, and a description of the problem. Parallax will return your product or its replacement using the same shipping method used to ship the product to Parallax. 14-DAY MONEY BACK GUARANTEE If, within 14 days of having received your product, you find that it does not suit your needs, you may return it for a full refund. Parallax Inc. will refund the purchase price of the product, excluding shipping/handling costs. This guarantee is void if the product has been altered or damaged. See the Warranty section above for instructions on returning a product to Parallax. COPYRIGHTS AND TRADEMARKS This documentation is copyright 2006 by Parallax Inc. By downloading or obtaining a printed copy of this documentation or software you agree that it is to be used exclusively with Parallax products. Any other uses are not permitted and may represent a violation of Parallax copyrights, legally punishable according to Federal copyright or intellectual property laws. Any duplication of this documentation for commercial uses is expressly prohibited by Parallax Inc. -
Programming and Customizing the Multicore Propeller
PROGRAMMING AND CUSTOMIZING THE MULTICORE PROPELLERTM MICROCONTROLLER This page intentionally left blank PROGRAMMING AND CUSTOMIZING THE MULTICORE PROPELLERTM MICROCONTROLLER THE OFFICIAL GUIDE PARALLAX INC. Shane Avery Chip Gracey Vern Graner Martin Hebel Joshua Hintze André LaMothe Andy Lindsay Jeff Martin Hanno Sander New York Chicago San Francisco Lisbon London Madrid Mexico City Milan New Delhi San Juan Seoul Singapore Sydney Toronto Copyright © 2010 by The McGraw-Hill Companies, Inc. All rights reserved. Except as permitted under the United States Copyright Act of 1976, no part of this publication may be reproduced or distributed in any form or by any means, or stored in a database or retrieval system, without the prior written permission of the publisher. ISBN: 978-0-07-166451-6 MHID: 0-07-166451-3 The material in this eBook also appears in the print version of this title: ISBN: 978-0-07-166450-9, MHID: 0-07-166450-5. All trademarks are trademarks of their respective owners. Rather than put a trademark symbol after every occurrence of a trademarked name, we use names in an editorial fashion only, and to the benefit of the trademark owner, with no intention of infringement of the trademark. Where such designations appear in this book, they have been printed with initial caps. McGraw-Hill eBooks are available at special quantity discounts to use as premiums and sales promotions, or for use in corporate training programs. To contact a representative please e-mail us at [email protected]. Information contained in this work has been obtained by The McGraw-Hill Companies, Inc. -

BASIC Stamp® Homework Board™
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 BASIC Stamp® HomeWork Board™ USB Single (555-28188) or 10-pack (#28188) This economical development platform with a surface-mount BASIC Stamp 2 microcontroller module was designed with beginners and student budgets in mind; the 10-pack perfect for outfitting a classroom. It is compatible with What’s a Microcontroller?, Robotics with the Boe-Bot, and most other Stamps in Class tutorials. See the Program Overview link at www.parallax.com/education for complete details. Features Key Specifications Built-in, surface-mount BASIC Stamp 2 Power requirements: 9 V battery; BS2 microcontroller requires 7 mA running, 50 µA in sleep BASIC Stamp I/O pins plus power Communication: USB mini-B to onboard connections are brought adjacent to a USB to RS-232 converter 2" x 1 3/8" breadboard. Operating temperature: 32 to 158 °F Built-in 220-ohm series resistors (0 to 70 °C) between the I/O pins and breadboard Dimensions: 3.05 x 4 in for a bit of protection in case of wiring (7.75 x 10.16 cm) errors On-board regulator delivers up to Additional Items Required 500 mA of current for BS2 and USB A to Mini-B cable (#805-00006) breadboard circuits 9 V battery LED connected to the BS2’s EEPROM clock line shows when a program is PC running Windows 2K/XP/Vista/7 for running the BASIC Stamp Editor software. -

Programming Editor Software 1
THE PROGRAMMING EDITOR SOFTWARE 1 PROGRAMMING EDITOR The Programming Editor software is a very powerful software tool. This datasheet is designed to explain the different software and hardware options for use with the Programming Editor software. The software is primarily designed for use with the pICAXE system, but can also be used with the older Stamp 1 system or with assembler code. Programming Options The Programming Editor allows control programs to be generated for microcontrollers. Programs can be created in three ways - drawn as flowcharts, written in a simple textual BASIC language, or written in the much more advanced assembler code language. When programs are created as flowcharts, the flowchart can be simulated on screen, but is then automatically converted into a BASIC listing for downloading. Therefore the rest of this explanation sheet refers to ‘BASIC’ as the generic term for both ‘flowchart drawing’ and direct ‘BASIC command’ programming. Hardware Options There are four main ways the Programming Editor software can be used to download a program into a microcontroller system: 1. Program a Stamp 1 module in BASIC via a direct cable link. 2. Program a PICAXE microcontroller in BASIC via a direct cable link. 3. Program a microcontroller to replace a Stamp chip using a PIC programmer. 4. Program a microcontroller in assembler code using a PIC programmer. 1) Stamp System The BASIC Stamp system was developed by a company called Parallax in the USA in the early 1990’s. The system uses two chips – a pre-programmed microcontroller and a separate memory chip (EEPROM). This means that programs can be downloaded (via a direct cable link) to the Stamp without the need for a programmer, because the program is actually downloaded into the external memory chip rather than into the microcontroller itself. -

Performance Analysis of PING))) Ultrasonic Distance Sensor
Performance Analysis of PING))) Ultrasonic Distance Sensor Elaine Cole, elainemcole (at) wustl.edu (A paper written under the guidance of Prof. Raj Jain) Download Abstract: The concept of a robot refers to a machine or device with the capacity to perform complex actions [MerriamWebster01]. In this current era of technology, robotics serves as more than just a branch of science [Wikipedia02], but a field with opportunity to improve the lives of people around the world. From designing a self-driving wheelchair for those in retirement communities struggling with mobility [Teo17] to building a robotic system to monitor neurons with a success rate comparable to manual performance of highly trained scientists [Trafton17], roboticists have made massive leaps in both the mechanical and electrical components of a robot. Today, robotic kits can be purchased for all ages, but as the use of robots in various industries increases, so does the need for precision in robotic systems; delay and error are unacceptable in certain real-time systems. The objective of this study is to measure and analyze the precision of a particular home-built robot's ability to recognize objects using a Parallax PING))) Ultrasonic Distance Sensor (PING))) sensor) with a 2^k*r factorial design, beginning with an overview of key methods and terms used in this study's system and experiment, subsequently detailing the performance evaluation, and finally explaining the results and analyzing what they mean as it relates to the precision of the robot. The results show that the PING))) sensor for the given factors and workloads has an error large enough that, while this may be acceptable for a hobby robot project, this robotic system should not be used in the real world for measuring distance in critical situations. -
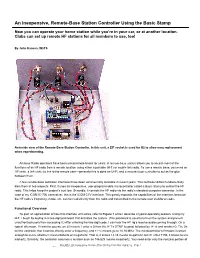
An Inexpensive, Remote-Base Station Controller Using the Basic Stamp
An Inexpensive, Remote-Base Station Controller Using the Basic Stamp Now you can operate your home station while you’re in your car, or at another location. Clubs can set up remote HF stations for all members to use, too! By John Hansen, W2FS An inside view of the Remote-Base Station Controller. In this unit, a ZIF socket is used for U2 to allow easy replacement when experimenting. Amateur Radio operators have been using remote bases for years. A remote-base station allows you to access most of the functions of an HF radio from a remote location using either a portable (H-T) or mobile link radio. To use a remote base, you need an HF radio, a link radio (to link to the remote user—generally this is done on UHF) and a remote-base controller to act as the glue between them. A few remote-base controller interfaces have been commercially available in recent years. This controller differs fundamentally from them in two respects: First, it uses an inexpensive, user-programmable microcontroller called a Basic Stamp to control the HF radio. This helps keep the project’s cost low. Secondly, it controls the HF radio via the radio’s standard computer connector. In the case of my ICOM IC-706 transceiver, this is the ICOM CI-V interface. This greatly expands the capabilities of the interface, because the HF radio’s frequency, mode, etc, can be read directly from the radio and transmitted to the remote user via Morse code. Functional Overview To gain an appreciation of how this interface unit works, refer to Figure 1 while I describe a typical operating session.