Performance Analysis of PING))) Ultrasonic Distance Sensor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Parallax 2004 Fall Product Guide Is Brought to You by Parallax, Inc
www.parallax.com The Parallax 2004 Fall Product Guide is brought to you by Parallax, Inc. and our network of 70+ distributors. This product guide is unique from all of our previous guides since the pricing is not published next to the Parallax part number and product description. Parallax, Inc. 599 Menlo Drive, #100 For pricing information, please visit your Rocklin, CA 95765, USA distributor’s web site or view the included price list (may not be applicable). Telephone: Office/Sales/Support: (916) 624-8333 The following 30 pages focus on Parallax’s Fax: (916) 624-8003 core products, including those which are most often carried by distributors. This includes Callers in the United States only: but is not limited to the following: BASIC Toll-Free Sales: 888-512-1024 Stamp microcontrollers, Programming Boards, Toll-Free Technical Support: 888-99-STAMP Starter Kits, Application Modules, Accessories, Robotics, Motor Control, Education Stamps Please Note: Sales Department, Technical in Class, Industrial, SX-Key Programming Support, and General Office hours are Monday Tools and Chips, Altera FPGA Development through Friday from 7:00 a.m. to 5:00 p.m., Tools. Additional accessories and components Pacific Standard Time. may be available from your distributor or www.parallax.com. Internet: www.parallax.com Our distributors are very responsive to customer requests and are able to procure E-mail: Parallax products that are available from our [email protected] web site. For international customers, this is [email protected] of extreme importance since distributors use [email protected] their expertise to provide you with the best pricing available after paying for overseas BASIC Stamp, Board of Education, Stamps shipping charges, duties, and taxes. -

BASIC Stamp Homework Board (Serial); Single #555-28158, 10
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 BASIC Stamp® HomeWork Board™ (Serial) Single (#555-28158) or 10-pack (#28158) This economical development platform with a surface-mount BASIC Stamp 2 microcontroller module was designed with beginners and student budgets in mind; the 10-pack perfect for outfitting a classroom. It is compatible with What’s a Microcontroller?, Robotics with the Boe-Bot, and most other Stamps in Class tutorials. See the Program Overview link at www.parallax.com/education for complete details. Features Key Specifications Built-in, surface-mount BASIC Stamp 2 Power requirements: 9 V battery; BS2 microcontroller requires 7 mA running, 50 µA in sleep BASIC Stamp I/O pins plus power Communication: Serial (RS-232) via DB9 connections are brought adjacent to a Operating temperature: 32 to 158 °F 2" x 1 3/8" breadboard. (0 to 70 °C) Built-in 220-ohm series resistors Dimensions: 3.05 x 4 in between the I/O pins and breadboard (7.75 x 10.16 cm) for a bit of protection in case of wiring errors Additional Items Required On-board regulator delivers up to 500 Serial cable (#800-00003) — OR — mA* of current for BS2 and breadboard USB to Serial Adapter with USB A to circuits (see Rev B note, page 3) Mini-B cable (#28031) LED connected to the BS2’s EEPROM 9 V battery clock line shows when a program is running PC running Windows 2K/XP/Vista/7 for the BASIC Stamp Editor software. -

OEM-BS2 – Rev A2 (#27290/#27291) □ 27290 – Assembled □ 27291 – Kit
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 OEM-BS2 – Rev A2 (#27290/#27291) □ 27290 – Assembled □ 27291 – Kit Assembly Instructions This document is a guide that will aid you in the assembly of your OEM-BS2 Rev A2. It is assumed that you have the proper equipment and possess the skills necessary to safely assemble electronic components. Generally, it is best to start with the lower profile components and then work your way to the tallest components. This is often true because in tight places lower profile components are more difficult to get at with taller components in the way. 1. The three lowest profile components on the board are the 4.7K resistors and the 10K resistor. These resistors should have color bands around them that signify their value. The color band pattern for the 4.7K resistors should be: Yellow, Violet, Red and Gold. The color band pattern for the 10K resistor should be: Brown, Black, Orange and Gold. Resistors are polarity insensitive, which means that it doesn’t matter which end goes where. Install the 4.7K resistors where designated by ‘R1’ and ‘R2’, and the 10K resistor where designated by 'R3'. 2. The next lowest profile component on the board is the 20-pin right angle SIP header. It may seem ambiguous as to which side is inserted into the PCB. The side with the angle should be inserted into the PCB as shown in the drawing to the right. -
Process Control
Process Control Student Guide VERSION 1.0 WARRANTY Parallax Inc. warrants its products against defects in materials and workmanship for a period of 90 days from receipt of product. If you discover a defect, Parallax Inc. will, at its option, repair or replace the merchandise, or refund the purchase price. Before returning the product to Parallax, call for a Return Merchandise Authorization (RMA) number. Write the RMA number on the outside of the box used to return the merchandise to Parallax. Please enclose the following along with the returned merchandise: your name, telephone number, shipping address, and a description of the problem. Parallax will return your product or its replacement using the same shipping method used to ship the product to Parallax. 14-DAY MONEY BACK GUARANTEE If, within 14 days of having received your product, you find that it does not suit your needs, you may return it for a full refund. Parallax Inc. will refund the purchase price of the product, excluding shipping/handling costs. This guarantee is void if the product has been altered or damaged. See the Warranty section above for instructions on returning a product to Parallax. COPYRIGHTS AND TRADEMARKS This documentation is copyright 2006 by Parallax Inc. By downloading or obtaining a printed copy of this documentation or software you agree that it is to be used exclusively with Parallax products. Any other uses are not permitted and may represent a violation of Parallax copyrights, legally punishable according to Federal copyright or intellectual property laws. Any duplication of this documentation for commercial uses is expressly prohibited by Parallax Inc. -

BASIC Stamp® Homework Board™
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 BASIC Stamp® HomeWork Board™ USB Single (555-28188) or 10-pack (#28188) This economical development platform with a surface-mount BASIC Stamp 2 microcontroller module was designed with beginners and student budgets in mind; the 10-pack perfect for outfitting a classroom. It is compatible with What’s a Microcontroller?, Robotics with the Boe-Bot, and most other Stamps in Class tutorials. See the Program Overview link at www.parallax.com/education for complete details. Features Key Specifications Built-in, surface-mount BASIC Stamp 2 Power requirements: 9 V battery; BS2 microcontroller requires 7 mA running, 50 µA in sleep BASIC Stamp I/O pins plus power Communication: USB mini-B to onboard connections are brought adjacent to a USB to RS-232 converter 2" x 1 3/8" breadboard. Operating temperature: 32 to 158 °F Built-in 220-ohm series resistors (0 to 70 °C) between the I/O pins and breadboard Dimensions: 3.05 x 4 in for a bit of protection in case of wiring (7.75 x 10.16 cm) errors On-board regulator delivers up to Additional Items Required 500 mA of current for BS2 and USB A to Mini-B cable (#805-00006) breadboard circuits 9 V battery LED connected to the BS2’s EEPROM clock line shows when a program is PC running Windows 2K/XP/Vista/7 for running the BASIC Stamp Editor software. -

Programming Editor Software 1
THE PROGRAMMING EDITOR SOFTWARE 1 PROGRAMMING EDITOR The Programming Editor software is a very powerful software tool. This datasheet is designed to explain the different software and hardware options for use with the Programming Editor software. The software is primarily designed for use with the pICAXE system, but can also be used with the older Stamp 1 system or with assembler code. Programming Options The Programming Editor allows control programs to be generated for microcontrollers. Programs can be created in three ways - drawn as flowcharts, written in a simple textual BASIC language, or written in the much more advanced assembler code language. When programs are created as flowcharts, the flowchart can be simulated on screen, but is then automatically converted into a BASIC listing for downloading. Therefore the rest of this explanation sheet refers to ‘BASIC’ as the generic term for both ‘flowchart drawing’ and direct ‘BASIC command’ programming. Hardware Options There are four main ways the Programming Editor software can be used to download a program into a microcontroller system: 1. Program a Stamp 1 module in BASIC via a direct cable link. 2. Program a PICAXE microcontroller in BASIC via a direct cable link. 3. Program a microcontroller to replace a Stamp chip using a PIC programmer. 4. Program a microcontroller in assembler code using a PIC programmer. 1) Stamp System The BASIC Stamp system was developed by a company called Parallax in the USA in the early 1990’s. The system uses two chips – a pre-programmed microcontroller and a separate memory chip (EEPROM). This means that programs can be downloaded (via a direct cable link) to the Stamp without the need for a programmer, because the program is actually downloaded into the external memory chip rather than into the microcontroller itself. -
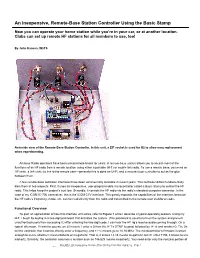
An Inexpensive, Remote-Base Station Controller Using the Basic Stamp
An Inexpensive, Remote-Base Station Controller Using the Basic Stamp Now you can operate your home station while you’re in your car, or at another location. Clubs can set up remote HF stations for all members to use, too! By John Hansen, W2FS An inside view of the Remote-Base Station Controller. In this unit, a ZIF socket is used for U2 to allow easy replacement when experimenting. Amateur Radio operators have been using remote bases for years. A remote-base station allows you to access most of the functions of an HF radio from a remote location using either a portable (H-T) or mobile link radio. To use a remote base, you need an HF radio, a link radio (to link to the remote user—generally this is done on UHF) and a remote-base controller to act as the glue between them. A few remote-base controller interfaces have been commercially available in recent years. This controller differs fundamentally from them in two respects: First, it uses an inexpensive, user-programmable microcontroller called a Basic Stamp to control the HF radio. This helps keep the project’s cost low. Secondly, it controls the HF radio via the radio’s standard computer connector. In the case of my ICOM IC-706 transceiver, this is the ICOM CI-V interface. This greatly expands the capabilities of the interface, because the HF radio’s frequency, mode, etc, can be read directly from the radio and transmitted to the remote user via Morse code. Functional Overview To gain an appreciation of how this interface unit works, refer to Figure 1 while I describe a typical operating session. -

Development of a Microcontroller Course for Mechanical Engineers
Mechanical Engineering Faculty Publications Mechanical Engineering 2001 Meeting the Needs of Industry: Development of a Microcontroller Course for Mechanical Engineers W. G. Culbreth Follow this and additional works at: https://digitalscholarship.unlv.edu/me_fac_articles Part of the Curriculum and Instruction Commons, Higher Education Commons, Mechanical Engineering Commons, and the Science and Mathematics Education Commons Repository Citation Culbreth, W. G. (2001). Meeting the Needs of Industry: Development of a Microcontroller Course for Mechanical Engineers. Proceedings of the 2001 American Society for Engineering Education Annual Conference & Exposition 7123-7131. American Society for Engineering Education. https://digitalscholarship.unlv.edu/me_fac_articles/280 This Conference Proceeding is protected by copyright and/or related rights. It has been brought to you by Digital Scholarship@UNLV with permission from the rights-holder(s). You are free to use this Conference Proceeding in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you need to obtain permission from the rights-holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/or on the work itself. This Conference Proceeding has been accepted for inclusion in Mechanical Engineering Faculty Publications by an authorized administrator of Digital Scholarship@UNLV. For more information, please contact [email protected]. Session ____ Meeting the Needs of Industry: Development of a Microcontroller Course for Mechanical Engineers William G. Culbreth University of Nevada, Las Vegas Abstract A course was developed at the UNLV to address the needs of local industry. The course was designed to acquaint mechanical engineering students with the principles and use of microcontrollers for measurement and control. -

BASIC Stamp Programming Manual Version 1.9
® BASIC Stamp Programming Manual Version 1.9 ® Warranty Parallax warrants its products against defects in materials and workmanship for a period of 90 days. If you discover a defect, Parallax will, at its option, repair, replace, or refund the purchase price. Simply return the product with a description of the problem and a copy of your invoice (if you do not have your invoice, please include your name and telephone number). We will return your product, or its replacement, using the same shipping method used to ship the product to Parallax (for instance, if you ship your product via overnight express, we will do the same). This warranty does not apply if the product has been modified or damaged by accident, abuse, or misuse. 14-Day Money-Back Guarantee If, within 14 days of having received your product, you find that it does not suit your needs, you may return it for a refund. Parallax will refund the purchase price of the product, excluding shipping/handling costs. This does not apply if the product has been altered or damaged. Copyrights and Trademarks Copyright © 1998 by Parallax, Inc. All rights reserved. PBASIC is a trademark and Parallax, the Parallax logo, and BASIC Stamp are registered trademarks of Parallax, Inc. PIC is a registered trademark of Microchip Technology, Inc. Other brand and product names are trademarks or registered trademarks of their respective holders. Disclaimer of Liability Parallax, Inc. is not responsible for special, incidental, or consequential damages resulting from any breach of warranty, or under any legal theory, including lost profits, downtime, goodwill, damage to or replacement of equipment or property, and any costs or recovering, reprogramming, or reproducing any data stored in or used with Parallax products. -

BASIC Stamp® Homework Board™
599 Menlo Drive, Suite 100 Rocklin, California 95765, Technical: [email protected] USA Education: [email protected] Office: (916) 624-8333 Web Site: www.parallax.com Fax: (916) 624-8003 BASIC Stamp® HomeWork Board ™ #29158 10-pack Introduction It’s not often that we start technical documentation with a bit of marketing punch. If you like the low cost of a BASIC Stamp Rev. Dx (retails ~$34) and the idea of a half-price BASIC Stamp 2 / Board of Education (retails ~$100) then the BASIC Stamp HomeWork board is the ticket for your classroom. This is the least expensive way to get a large educational group started with the BASIC Stamp microcontroller. The HomeWork Board was created specifically for educators to send home with students with these uses in mind: • BASIC Stamp-related homework assignments • Dedicated science-fair, contest or hobby projects • Students who express personal interest in further developing their BASIC Stamp projects but can’t have their own Board of Education / BS2 due to its higher cost. Since it is less expensive than the Board of Education / BS2 module, can the board be used for Stamps in Class experiments? Most likely, with the following considerations: • Servo connection ports for robotics are not included on the HomeWork Board platform. It’s possible to use male/male headers for servo connections with a second power supply jumpered to the HomeWork Board to control servos. • 220 ohm resistors are built into each of the 16 I/O pins for current protection so the PBASIC interpreter cannot be easily damaged. This protects the BASIC Stamp from over-current conditions but also slightly changes the behavior of the Stamps in Class experiments when certain commands are used, such as RCTIME. -

Professional Development Board (#28138)
Web Site: www.parallax.com Office: (916) 624-8333 Forums: forums.parallax.com Fax: (916) 624-8003 Sales: [email protected] Sales: (888) 512-1024 Technical: [email protected] Tech Support: (888) 997-8267 Professional Development Board (#28138) The Parallax Professional Development Board (PDB) is high-quality, fully-integrated development platform for BASIC Stamp®, Javelin Stamp™, and SX28AC/DP microcontrollers. A wide variety of typical I/O (LEDs, LCD interface, buttons, etc.) devices and circuitry are built into the PDB, providing the developer with an ideal platform for rapid microcontroller project development. Features 40-pin DIP socket (for BASIC Stamp 2 series and Javelin Stamp modules) 14-pin SIP socket (for BS1-IC) 28-pin “skinny” DIP socket (for SX28AC/DP) USB, DB-9, BS1, and SX-Key programming connectors 2.1 mm, center-positive connector for DC power 5 volt, 1.0 amp power-supply with power switch 16 discrete LEDs Five 7-segment (with decimal point), common-cathode LED displays Parallel LCD interface may be configured in 4-bit or 8-bit mode Two servo-compatible headers Two 10 k potentiometers Audio amplifier with built-in speaker; with switch for external speaker L293D high-current driver for motors, solenoids, etc. Eight, normally-open pushbuttons (I/O lines protected, and pulled-up to Vdd via 10K) Eight DIP switches (I/O lines protected, and pulled-up to Vdd via 10K) Pulse generator with selectable frequency (1 Hz, 10 Hz, 100 Hz, or 1 kHz) RJ-11 connector; configurable for X-10 and 1-Wire® communications RS-232 DCE port with MAX232E transceiver DS1307 (I2C®) real-time-clock with 3v back-up battery (pre-installed) Copyright © Parallax, Inc. -

BOE-USB Manual V1.4
Sales: [email protected] 599 Menlo Drive, Suite 100 1-888-512-1024 Rocklin, California 95765, USA Tech Support: [email protected] Office: (916) 624-8333 1-888-99-STAMP Fax: (916) 624-8003 Web Site: www.parallax.com Board Of Education® USB (#28850) Development / Education Platform for the BASIC Stamp® and Javelin Stamp Microcontrollers The Board Of Education USB (BOE-USB) is a complete, low-cost development platform designed for those interested in learning and using Parallax's 24-pin BASIC Stamp or Javelin Stamp modules. Its compact size, convenient features, and low price make it an ideal tool for the student and educator. For educators, the Board of Education provides a clean, efficient platform for our Stamps In Class Parts and Text Kits, or your own BASIC Stamp-based curriculum. Features y 2.1 mm center-positive plug and 9-volt battery power supply connections (mechanically interlocked to prevent dual connection). Note: The Board of Education USB is not powered from the USB connection. y Three-position power switch allows BASIC Stamp IC programming without providing power to servo connectors. y Jumper selection of servo power: regulated (Vdd) or unregulated (Vin). y Mini USB connector for BASIC Stamp IC programming and serial communication during run-time. y On-board regulator delivers up to 1 amp of power for larger projects. y P0 - P15 I/O pins, Vdd, Vin, and Vss connections brought adjacent to 2" x 1 3/8" breadboard area. y Female 10-pin dual row connector for optional AppMods. Packing List y Board of Education USB y 3" jumper wires - pack of 10 y PCB rubber feet Note: the necessary FTDI VCP drivers may be downloaded from www.parallax.com; see the Software and Hardware Installation section on page 3.