Mirror Size and Lane-Change Crashes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metra: 70-1858
Metra: 70-1858 Product Details GM 1988 - 2005 Harness Description • Plugs into car harness at radio (21 pin) • 5 inches long Applications • BUICK Century 1990 1996 • BUICK Century 1988 1989 • BUICK Electra 1990 1990 • BUICK Electra 1988 1989 • BUICK Le Sabre 1991 1994 • BUICK Le Sabre 1990 1990 • BUICK Le Sabre 1988 1989 • BUICK Park Avenue 1991 1994 • BUICK Park Avenue 1988 1990 • BUICK Riviera 1990 1995 • BUICK Riviera 1986 1989 • BUICK Roadmaster 1991 1994 • BUICK Skylark 1987 1995 • BUICK Skyhawk 1988 1989 • CADILLAC Coupe DeVille 1990 1993 • CADILLAC Coupe DeVille 1988 1989 • CADILLAC DeVille 1994 1995 • CADILLAC DeVille 1990 1993 • CADILLAC DeVille 1988 1989 • CADILLAC Eldorado 1988 1991 • CADILLAC Escalade (ESV and EXT included) 1999 2002 • CADILLAC Seville 1988 1991 • CHEVROLET Astro Van 1996 2005 • CHEVROLET Astro Van 1991 1995 • CHEVROLET Avalanche 2002 2002 • CHEVROLET Beretta 1991 1996 • CHEVROLET Beretta (AC) 1988 1990 • CHEVROLET Beretta (NON-AC) 1988 1990 • CHEVROLET Blazer (Full Size) 1992 1994 • CHEVROLET Blazer With DIN & 1/2 Radio 2002 2002 • CHEVROLET Blazer 1998 2001 • CHEVROLET Camaro 1997 2002 • CHEVROLET Camaro 1993 1996 • CHEVROLET Camaro 1990 1992 • CHEVROLET Caprice 1994 1996 • CHEVROLET Caprice 1991 1993 • CHEVROLET Cavalier 1995 1999 • CHEVROLET Cavalier 1991 1994 • CHEVROLET Celebrity 1990 1990 • CHEVROLET Corsica 1991 1996 • CHEVROLET Corsica (AC) 1988 1990 • CHEVROLET Corsica (NON-AC) 1988 1990 • CHEVROLET Express van (full size) 1996 2000 • CHEVROLET Impala SS 1994 1996 • CHEVROLET Lumina 1995 2001 • CHEVROLET -

TEQ® Correct Professional Brake Pads
Most Popular Numbers ‐ TEQ® Correct Professional Brake Pads Line Rank Part # Vehicle Applications Code •Cadillac - Escalade (2002-2006) Front, Escalade ESV (2003-2006) Front, Escalade EXT (2002-2006) Front•Chevrolet - Astro (2003-2005) Front, Avalanche 1500 (2002-2006) Front, Avalanche 2500 (2002-2006) Rear, Express Vans (2003-2008) Front, Silverado Pickups (1999-2007) Front, Silverado Pickups (1999-2010) Rear, Silverado Pickups V8 5.3 (2005-2007) Front, Suburbans (2000-2006) Front, Suburbans (2000-2013) Rear, Tahoe (2000-2006) Front•GMC - C-Series Pickups 1 PDP PXD785H (2000) Rear, C/K Series Pickups (2000) Rear, Safari (2003-2005) Front, Savana Vans (2003-2008) Front, Sierra Pickups (1999-2007) Front, Sierra Pickups (1999-2010) Rear, Sierra Pickups V8 6.6 (2001-2002) Front, Sierra Pickups V8 8.1 (2002) Front, Sierra Pickups V8 6.0 (2005) Front, Sierra Pickups V8 6.0 (2005) Rear, Sierra Pickups V8 6.6 (2005) Rear, Yukons (2000-2006) Front, Yukons (2000-2013) Rear•Hummer - H2 (2003-2009) Rear •Cadillac - Escalade (2008-2014) Front, Escalade ESV (2008-2014) Front, Escalade EXT (2008-2013) Front, XTS (2013) Front•Chevrolet - Avalanche (2008-2013) Front, Express Vans (2009-2014) Front, Silverado Pickups (2005-2013) Front, Silverado Pickups V6 4.3 (2005-2007) Front, Silverado Pickups V8 4.8 (2005-2007) Front, Silverado Pickups V8 5.3 (2005- 2 PDP PXD1363H 2007) Front, Silverado Pickups V8 6.0 (2007) Front, Suburbans (2007-2014) Front, Tahoe (2008-2014) Front, Tahoe V8 4.8 (2008) Front, Tahoe V8 5.3 (2008) Front•GMC - Savana Vans (2009-2013) -

COLD START RATTLE NOISE - (Dec 1, 1996)
#57-71-06A: COLD START RATTLE NOISE - (Dec 1, 1996) REVISION: 12/16/96 THIS BULLETIN IS BEING REVISED TO ADD MODELS AND 1996-97 MODEL YEARS. PLEASE DISCARD CORPORATE BULLETIN 57-71-06 (SECTION 7 - TRANSMISSION). ---------------------------------------------------------------------- SUBJECT: COLD START RATTLE NOISE (DIAGNOSIS/SERVICE PROCEDURE) MODELS: 1991 BUICK REATTA 1991-96 BUICK RIVIERA 1991-96 BUICK PARK AVENUE, ULTRA 1991-97 BUICK REGAL 1992-97 BUICK LE SABRE 1994-96 BUICK CENTURY 1994-97 BUICK SKYLARK 1991-93 CADILLAC ELDORADO, SEVILLE, SIXTY SPECIAL AND FLEETWOOD (FWD) 1991-95 CADILLAC DE VILLE 1991-97 CHEVROLET LUMINA 1992-96 CHEVROLET LUMINA APV 1997 CHEVROLET VENTURE 1994-95 CHEVROLET BERETTA, CORSICA 1995-97 CHEVROLET MONTE CARLO 1991-92 OLDSMOBILE TORONADO, TROFEO 1991-95 OLDSMOBILE NINETY EIGHT 1991-97 OLDSMOBILE CUTLASS SUPREME 1992-97 OLDSMOBILE EIGHTY EIGHT, SILHOUETTE 1994-96 OLDSMOBILE CUTLASS CIERA 1994-97 OLDSMOBILE ACHIEVA 1991-97 PONTIAC GRAND PRIX 1992- 97 PONTIAC BONNEVILLE, TRANS SPORT 1994-97 PONTIAC GRAND AM WITH HYDRA-MATIC 4T60-E (RPO M13) CONDITION: SOME OWNERS MAY NOTICE A RATTLE NOISE FROM THE ENGINE COMPARTMENT AFTER A COLD START THAT LASTS FOR LESS THAN ONE MINUTE. THIS CONDITION WILL USUALLY ONLY OCCUR ONCE PER DAY AFTER THE VEHICLE IS STARTED AFTER SITTING OVERNIGHT OR AN EXTENDED PERIOD OF TIME. CAUSE: THIS RATTLE NOISE MAY BE ASSUMED TO BE AN ENGINE RELATED NOISE (PISTON SLAP, BEARING KNOCK, LIFTER RATTLE, ETC.) BUT MAY ACTUALLY BE A 4T60-E TRANSAXLE NOISE CAUSED BY A COMBINATION OF OIL PUMP STARVATION/ CAVITATION AND PRESSURE REGULATOR VALVE INSTABILITY. THIS TRANSAXLE NOISE CONDITION DOES NOT DAMAGE THE TRANSAXLE AND DOES NOT CAUSE A DURABILITY CONCERN. -
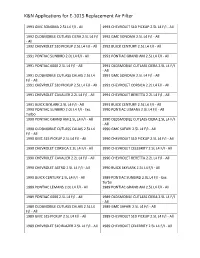
Applications E-1015
K&N Applications for E-1015 Replacement Air Filter 1993 GMC SONOMA 2.5L L4 F/I - All 1993 CHEVROLET S10 PICKUP 2.5L L4 F/I - All 1992 OLDSMOBILE CUTLASS CIERA 2.5L L4 F/I 1992 GMC SONOMA 2.5L L4 F/I - All - All 1992 CHEVROLET S10 PICKUP 2.5L L4 F/I - All 1992 BUICK CENTURY 2.5L L4 F/I - All 1991 PONTIAC SUNBIRD 2.0L L4 F/I - All 1991 PONTIAC GRAND AM 2.5L L4 F/I - All 1991 PONTIAC 6000 2.5L L4 F/I - All 1991 OLDSMOBILE CUTLASS CIERA 2.5L L4 F/I - All 1991 OLDSMOBILE CUTLASS CALAIS 2.5L L4 1991 GMC SONOMA 2.5L L4 F/I - All F/I - All 1991 CHEVROLET S10 PICKUP 2.5L L4 F/I - All 1991 CHEVROLET CORSICA 2.2L L4 F/I - All 1991 CHEVROLET CAVALIER 2.2L L4 F/I - All 1991 CHEVROLET BERETTA 2.2L L4 F/I - All 1991 BUICK SKYLARK 2.5L L4 F/I - All 1991 BUICK CENTURY 2.5L L4 F/I - All 1990 PONTIAC SUNBIRD 2.0L L4 F/I - Exc. 1990 PONTIAC LEMANS 2.0L L4 F/I - All Turbo 1990 PONTIAC GRAND AM 2.5L L4 F/I - All 1990 OLDSMOBILE CUTLASS CIERA 2.5L L4 F/I - All 1990 OLDSMOBILE CUTLASS CALAIS 2.5L L4 1990 GMC SAFARI 2.5L L4 F/I - All F/I - All 1990 GMC S15 PICKUP 2.5L L4 F/I - All 1990 CHEVROLET S10 PICKUP 2.5L L4 F/I - All 1990 CHEVROLET CORSICA 2.2L L4 F/I - All 1990 CHEVROLET CELEBRITY 2.5L L4 F/I - All 1990 CHEVROLET CAVALIER 2.2L L4 F/I - All 1990 CHEVROLET BERETTA 2.2L L4 F/I - All 1990 CHEVROLET ASTRO 2.5L L4 F/I - All 1990 BUICK SKYLARK 2.5L L4 F/I - All 1990 BUICK CENTURY 2.5L L4 F/I - All 1989 PONTIAC SUNBIRD 2.0L L4 F/I - Exc. -

INSURANCE THEFT REPORT Passenger Cars, Vans, Pickups, and Utility Vehicles
If you have issues viewing or accessing this file contact us at NCJRS.gov. .. ,.~ INSURANCE THEFT REPORT Passenger Cars, Vans, Pickups, and Utility Vehicles Highway Loss Data Institute T86-1 105686 U.S. Department of Justice National Institute of Justice This document has been reproduced exactly as received from the person or organization originating it. points of view or opinions stated in this document are those of the authors and do not necessarily represent the official position or policies of the National Institute of Justice. Permission to reproduce this c.o~ed material has been qranted by • . PublJ.C Domalll Hlghway LOss Data Instltute to the National Criminal Justice Reference Service (NCJRS). Further reproduction outside of the NCJRS system requires permis sion of the cOflV~ner. NCJRS JUN Z4 1~81 .. ':/~ug!h~Nay loss [)a~tal ~ril$tn~(Ult~ ~nSlUlralnc<e Thsf~ lAepor~ Passenger Cars, Vans, Pickups, and Utiltty Vehicles 1986 Models During Their First Year 1985 Models During Their First Two Years 1984 Models During Their First Three Years Permission to quote from or to reproduce material from this publication is granted when due acknowledgement is made. Highway Loss Data Institute - Watergate Six Hundred - Washington, DC 20037 Research Report HLDI T86-1; May 1987 © 1987/HLDI The membership of the Highway Loss Data Institute Board of Directors and the Technical Resource Com mittee represents insurance companies that are sup plying data to HLDI. Financial support for HLDI is pro vided through the Insurance Institute for Highway Safety, which in tum is supported by most automobile insurers either directly or through their trade associations. -

An Investigation of the Mechanics of Rollover for Cars and Light Trucks Yvonne Irene Katherine Lund Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 1995 An investigation of the mechanics of rollover for cars and light trucks Yvonne Irene Katherine Lund Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Applied Mechanics Commons Recommended Citation Lund, Yvonne Irene Katherine, "An investigation of the mechanics of rollover for cars and light trucks " (1995). Retrospective Theses and Dissertations. 10930. https://lib.dr.iastate.edu/rtd/10930 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. INFORMATION TO USERS This manuscript has been reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from aity type of computer printer. The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margins, and improper alignment can adversely affect reproduction. In the imlikely event that the author did not send UMI a complete manuscript and ±ere are missing pages, these vtrill be noted. Also, if unauthorized copyright material had to be removed, a note wiD indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning ±e original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overlaps. -

Page 1 Of.Tif
( Page 1 of 2) State of California AIR RESOURCES BOARD EXECUTIVE ORDER A-6-503 Relating to Certification of New Motor Vehicles GENERAL MOTORS CORPORATION Pursuant to the authority vested in the Air Resources Board by the Health and Safety Code, Division 26, Part 5, Chapter 2; and Pursuant to the authority vested in the undersigned by Health and Safety Code Sections 39515 and 39516 and Executive Orders G-45-3 and G-45-4; IT IS ORDERED AND RESOLVED: That 1991 model-year General Motors Corporation exhaust emission control systems are certified as described below for gasoline-powered passenger cars: Engine Family: MIG2. 5W5TPG1 Displacement: 2.5 Liters (151 Cu. In. ) Exhaust Emission Control Systems (Special Features) : Three-Way Catalyst Oxygen Sensor Exhaust Gas Recirculation Throttle Body Electronic Fuel Injection Vehicle models, transmissions, engine codes and evaporative emission control families are listed on attachments. The following are the emission standards for this engine family: Hydrocarbons Carbon Monoxide Nitrogen Oxides (Grams per Mile) (Grams_per Mile) (Grams per Mile) 0 . 41 7.0 0 . 4 The following are the certification emission values for this engine family: Hydrocarbons Carbon Monoxide Nitrogen Oxides (Grams per Mile) (Grams per Mile) (Grams per Mile) 0. 27 2.7 ). 2 BE IT FURTHER RESOLVED: That the listed vehicle models also comply with "California Evaporative Emission Standards and Test Procedures for 1978 and Subsequent Model Gasoline-Powered Motor Vehicles". GENERAL MOTORS CORPORATION EXECUTIVE ORDER A-6-503 (Page 2 of 2) BE IT FURTHER RESOLVED: That the listed vehicle models also comply with the Board's "Specifications for Fill Pipes and Openings of Motor Vehicle Fuel Tanks" (Title 13, California Code of Regulations, Section 2290) for the aforementioned model-year. -

Federal Register/Vol. 63, No. 135/Wednesday, July 15, 1998
38096 Federal Register / Vol. 63, No. 135 / Wednesday, July 15, 1998 / Rules and Regulations DEPARTMENT OF TRANSPORTATION vehicles. The standard seeks to facilitate manufactured for sale in the United such tracing by requiring that vehicle States. Therefore, those two vehicle National Highway Traffic Safety identification numbers (VINs), VIN lines were not properly included on the Administration derivative numbers, or other symbols be list in Appendix A, and have been placed on major component vehicle deleted. In addition, two other General 49 CFR Part 541 parts. The theft prevention standard Motors car lines, the Chevrolet Corsica [Docket No. NHTSA±98±3752] requires motor vehicle manufacturers to and the Oldsmobile Cutlass Ciera inscribe or affix VINs onto covered underwent name and platform changes RIN 2127±AH06 original equipment major component for model year 1997. The new names Federal Motor Vehicle Theft Prevention parts, and to inscribe or affix a symbol have been substituted in Appendix A, Standard; Final Listing of Model Year identifying the manufacturer and a with a footnote indicating the former 1999 High-Theft Vehicle Lines common symbol identifying the name and the date of the change. replacement component parts for those On July 31, 1997, the final listing of AGENCY: National Highway Traffic original equipment parts, on all vehicle high-theft lines for the MY 1998 vehicle Safety Administration (NHTSA), lines selected as high-theft. lines was published in the Federal Department of Transportation. The Anti Car Theft Act also amended Register (62 FR 40949). The final listing ACTION: Final rule. 49 U.S.C. § 33103 to require NHTSA to identified vehicle lines that were listed promulgate a parts-marking standard for the first time and became subject to SUMMARY: This final rule announces applicable to major parts installed by the theft prevention standard beginning NHTSA's determination for model year manufacturers of ``passenger motor with the 1998 model year. -

Oldsmobile Alero 99-04
OLDSMOBILE ALERO 99-04 OM04012BA OM04012BB OM04013BB OM10019AL OM20013A OM20013B OM31012A OM31012B C. Certified Parts *. ADD Products C * ITEM NO. DESCRIPTION YEAR PART NO PARTS LINK MEASURE OM04012BA FRT BUMPER MAT-COLOR BLACK 99-04 PEFORMANCE GM1000654 5pc / 37.55 COM04012BB FRT BUMPER PRIMED BLACK 99-04 22610697 GM1000575 5pc / 37.55 COM04013BB RR BUMPER PRIMED BLACK 99-04 22610700 GM1100569 5pc / 43.98 COM10019AR FENDER RH . 99-04 22667900 GM1241269 1pc / 2.10 COM10019AL FENDER LH . 99-04 22667901 GM1240269 1pc / 2.10 COM20013A HOOD . 99-04 22603355 GM1230250 1pc / 6.10 C* OM20013B HOOD . 01-04 22634114 1pc / 6.10 OM31012A HEADER PANEL MAT-COLOR BLACK 99-04 22619078 GM1221114 3pc / 5.32 COM31012B HEADER PANEL MAT-COLOR BLACK 99-04 22619078 GM1221114 1pc / 2.84 CCV39035A CONDENSER GRAN AM/ALRO '99-'02 16/7.7mm 99-01 52495849 GM3030240 1pc / 2.55 CV39035B CONDENSER CLASIC '04-'05 16mm/F/h 7.7mm 02-05 22719427 GM3030239 1pc / 2.55 CV60004B RAD FAN ASSY LH . 99-05 M:88986474 GM3115109 1pc / 0.91 CV66004A DUAL FAN ASSY . 99-04 M:88986473/88986474 GM3115105 1pc / 2.11 CNO 330 - 1 OLDSMOBILE CUTLASS CIERA 82-96 OM05001VA OM07003GA OM07004GA OM07004GB C. Certified Parts *. ADD Products C * ITEM NO. DESCRIPTION YEAR PART NO PARTS LINK MEASURE OM05001VA FRT APRON MAT-COLOR BLACK 82-94 22520343 GM1092133 5pc / 3.20 OM07003GA GRILLE CHRM-PAINTED BLK/DK GRAY 87-88 22531708 GM1200148 5pc / 1.00 OM07003GC GRILLE CHRM-PAINTED BLACK 87-88 22532033 GM1200149 5pc / 1.00 COM07004GA GRILLE CHRM-PAINTED SILVER/BLACK 89-92 10068949 GM1200106 5pc / 1.05 OM07004GB GRILLE CHRM-PAINTED BLACK 89-96 10068950 GM1200107 5pc / 1.05 (10205025) BK37002A RADIATOR L4/V6/2.2/3.1/3.3 W/TWO TRANS 92-96 52458473 1pc / 3.58 BK37003A RADIATOR L4/V6/2.2/3.1/3.3 W/SINGLE OC 92-96 52458474 1pc / 3.58 CNO 331 - 1 OLDSMOBILE CUTLASS CIERA 97-99 C. -

1994 Combined Car Base Price Information
1994 ACURA SAMPLE VIN: JH4DC2384RC000000 1994 AUDI (Continued) SAMPLE VIN: WAUBJ58C2RA000000 MODEL: DC238 MODEL: BJ BODY TYPE MODEL BASE PRICE BODY TYPE MODEL BASE PRICE ACURA INTEGRA GS-R AUDI 100S 2 Door Coupe DC238 $19,650 4 Door Sedan/5 Speed Transmission BJ, BK 35,120 4 Door Sedan DB858 19,980 4 Door Sedan/Automatic Transmission BJ, BK 35,920 Station Wagon CK 38,070 ACURA INTEGRA LS 2 Door Coupe/5 Speed Transmission DC435 17,450 AUDI CABRIOLET 2 Door Coupe/Automatic Transmission DC445 18,200 Convertible BL 38,950 4 Door Sedan/5 Speed Transmission DB755 17,450 4 Door Sedan/Automatic Transmission DB765 18,200 AUDI S4 QUATTRO ) 4 x 4 4 Door Sedan HR 49,070 ACURA INTEGRA RS 2 Door Coupe/5 Speed Transmission DC434 14,820 AUDI V8 QUATTRO 2 Door Coupe/Automatic Transmission DC444 15,570 4 Door Sedan BW 58,700 4 Door Sedan/5 Speed Transmission DB754 15,580 4 Door Sedan/Automatic Transmission DB764 16,330 ACURA LEGEND GS 4 Door Sedan/6 Speed Transmission KA758 40,700 4 Door Sedan/Automatic Transmission KA768 40,700 1994 BMW SAMPLE VIN: WBABE5302RJ000000 MODEL: BE ACURA LEGEND L 2 Door Coupe/6 Speed Transmission KA816 37,700 BODY TYPE MODEL BASE PRICE 2 Door Coupe/Automatic Transmission KA826 37,700 4 Door Sedan/5 Speed Transmission (Cloth) KA755 33,800 BMW 318i 4 Door Sedan/Automatic Transmission (Cloth) KA765 34,600 2 Door Sedan/S BE $25,800 4 Door Sedan/5 Speed Transmission (Leather) KA756 35,300 4 Door Sedan CA 24,675 4 Door Sedan/Automatic Transmission (Leather) KA766 36,100 BMW 325i ACURA LEGEND LS 2 Door Sedan/S BF 32,200 2 Door Coupe/6