Wild Stallion Distortion Pedal …………….………………………
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2013 Full Line Catalog 2013
Electric Guitars, Electric Basses, Acoustic Guitars, Amplifiers, Effects & Accessories 2013 Accessories Effects & Amplifiers, Guitars, Electric Acoustic Electric Basses, Guitars, www.ibanez.com 1726 Winchester Road, Bensalem, PA 19020 · U.S.A. · ©2012 Printed in Japan NOV12928 (U) For Authorized Dealers Only - All finishes shown are as close as four-color printing allows. CATALOG - All specifications and prices are subject to change without notice. 2013 FULL LINE Table of Contents Solid Body Electric Guitars Signature Models 6-10 Iron Label RG/S 11-13 RG/GRG/GRX/MIKRO 13-26 RGA 26 RGD 27 S 28-31 X 32-33 FR 33 ARZ 34 AR 34-35 ART 35-36 Jumpstart 37 Hollow Body Electric Guitars Signature Models 40-41 Artstar 41 Artcore Expressionist 42-44 Artcore 44-47 Electric Basses Signature Models 50-51 SR 51-61 Grooveline 62-63 BTB 64-65 ATK 66-67 Artcore 67-68 GSR/MIKRO 68-73 Jumpstart 73 Acoustic Guitars Signature Models 76 Artwood 77-81 PF 82-85 SAGE 85 AEG 86 AEL 87 AEF 88-89 EW 90-91 Talman 91-92 AEB 92 SAGE Bass 93 Classical 93-95 Ukulele 95-96 Banjo 96 Resonator 96 Mandolin 97 Jampack 98 Amplifiers/Effects/Accessories Tube Screamer Amplifier 100-101 Wholetone 101 Promethean 102-103 Sound Wave 103 Troubadour 104-105 IBZ 105 Tube Screamer 106 9 Series 107 Echo Shifter 108 Signature Effect Pedal 109 Wah Pedals 109 Tuners 110 Cables & Adapter 110 Stand 111 Tremolo Arm 111 Picks 111 Cases/Straps 112 Bags/Microphone Stand 113 02 for more information visit www.Ibanez.com for more information visit www.Ibanez.com 03 04 for more information visit www.Ibanez.com -

Line 6 HX Stomp XL Cheat Sheet-Rev A, English
® 3.0 OWNER’S MANUAL 40-00-0500 Rev A (For use with HX Stomp XL Firmware v3.0) © 2021 Yamaha Guitar Group, Inc. All rights reserved. 0•1 Contents Welcome to HX Stomp XL 4 The Blocks 25 Command Center 50 What’s In the Box? 4 Input 25 Assigning a Command 50 Common Terminology 4 Outputs 25 Copying and Pasting a Command 53 HX Edit Application 5 Signal Present and Clip Indicators 26 Copying and Pasting All Commands 53 Updating HX Stomp XL Firmware 5 Effects 26 Clearing a Command 53 Marketplace 5 Amp+Cab 32 Clearing All Commands 53 The Hardware 6 Amp 34 Global EQ 54 Quick Start 9 Preamp 34 Cab 34 Resetting Global EQ 54 Hooking It All Up 9 Impulse Response (IR) 36 Global Settings 55 Play View 12 Send/Return 37 Looper 38 Setting Proper Levels 55 Stomp Footswitch Mode 12 Split 40 Resetting All Global Settings 55 Preset List 13 Mixer 40 Global Settings > Ins/Outs 56 Preset Footswitch Mode 13 U.S. Registered Trademarks 41 Global Settings > Preferences 57 Snapshot Footswitch Mode 14 Global Settings > Footswitches 58 Pedal Edit Mode 14 Snapshots 42 Global Settings > EXP Pedals 59 Edit View 16 Using Snapshots 42 Global Settings > MIDI/Tempo 60 SnapshotBlockBypassOn/Off 43 Global Settings > Displays 60 Selecting Blocks/Adjusting Parameters 17 Copying/Pasting a Snapshot 44 USB Audio 61 Bypassing a Block 17 Swapping Snapshots 44 Bypassing HX Stomp XL Completely 17 Saving Snapshots 44 Hardware Monitoring vs. DAW Software Monitoring 61 Choosing a Block’s Model 18 Determining Snapshot Edit Behavior 44 DI Recording and Re-amping 62 Moving Blocks 18 Core Audio -

“WW 2,873,387 United States Patent Rice Patented Feb
Feb. 10, 1959 M. c. KIDD 2,873,387 CONTROLLABLE.‘ TRANSISTOR CLIPPING CIRCUIT Filed Dec. 17, '1956 INVENTOR. v MARSHALL [.KIDD “WW 2,873,387 United States Patent rice Patented Feb. 10, 1959. 2 tap 34 on a second source of energizing potential, here illustrated as a battery 30, through a load resistor 32. 2,873,387 The battery 30 has a ground tap 31 at an intermediate point thereon, and the variable tap 34 allows the ener CONTROLLABLE TRANSISTOR CLIPPING gizing potential supplied to the collector electrode 14 to cmcurr be varied from a positive to a negative value. Output Marshall vC. Kidd, Haddon Heights, N. J., assignor to signals are derived between an output terminal 36, which Radio Corporation of America, a corporation of Dela is connected directly to the collector electrode 14 of the ware ‘ ‘ transistor 16, and a ground terminal 37. One type of 10 clipped or limited output signal that is available at the Application December 17, 1956, Serial No. 628,807 output terminals 36 is illustrated by the waveform 38, 5 ‘Claims. (Cl. 307-885) and the manner in which it is derived is hereinafter de scribed. , In order to describe the operation of the circuit, as This invention relates to signal translating circuits and 15 sume that the variable tap 34 on the battery 30 is set more particularly to transistor circuits for limiting or so that a small positive voltage, negative, however, with clipping a translated signal; - respect to base electrode voltage, appears on the collector In many types of electronic equipment, such as tele electrode 14, and that a sine wave is applied to the input vision, radar, computer and like equipment, it may be terminal 10, as illustrated by the waveform 18. -
Tektronix Cookbook of Standard Audio Tests
( Copyright © 1975, Tektronix, Inc. AI! rig hts re served P ri nt ed· in U .S.A. ForeIg n and U .S.A. Products of Tektronix , Inc. are covered by Fore ign and U .S.A . Patents and /o r Patents Pending. Inform ation in thi s publi ca tion supersedes all previously published material. Specification and price c hange pr ivileges reserve d . TEKTRON I X, SCOPE-MOBILE, TELEOU IPMENT, and @ are registered trademarks of Tekt ro nix, Inc., P. O. Box 500, Beaverlon, Oregon 97077, Phone : (Area Code 503) 644-0161, TWX : 910-467-8708, Cabl e : TEKTRON IX. Overseas Di stributors in over 40 Counlries. 1 STANDARD AUDIO TESTS BY CLIFFORD SCHROCK ACKNOWLEDGEMENTS The author would like to thank Linley Gumm and Gordon Long for their excellent technical assistance in the prepara tion of this paper. In addition, I would like to thank Joyce Lekas for her editorial assistance and Jeanne Galick for the illustrations and layout. CONTENTS PRELIMINARY INFORMATION Test Setups ________________ page 2 Input- Output Load Matching ________ page 3 TESTS Power Output _______________ page 4 Frequency Response ____________ page 5 Harmonic Distortion _____________ page 7 Intermodulation Distortion __________ page 9 Distortion vs Output _____________ page 11 Power Bandwidth page 11 Damping Factor page 12 Signal to Noise Ratio page 12 Square Wave Response page 15 Crosstalk page 16 Sensitivity page 16 Transient Intermodulation Distortion page 17 SERVICING HINTS___________ page19 PRELIMINARY INFORMATION Maintaining a modern High-Fidelity-Stereo system to day requires much more than a "trained ear." The high specifications of receivers and amplifiers can only be maintained by performing some of the standard measure ments such as : 1. -

Topaz Sr10 / Sr20 Stereo Receivers Top-Tips
TOPAZ SR10 / SR20 STEREO RECEIVERS TOP-TIPS Incredible performance, connectivity and value for money… The most powerful amplifiers in the Topaz range are designed to on the back allow you to connect traditional sources such as be the heart of your separates hi-fi system. The SR10 offers a CD players and even Blu-ray players. Thanks to a high quality room-filling 85 watts per channel and is backed by a dedicated Wolfson DAC, the SR20 goes one step further and provides three subwoofer output as well as two sets of speaker outputs - so you additional digital audio inputs, allowing the connection of digital can listen in two rooms at once or bi-wire your main speakers for sources such as streamers, TVs or set top boxes. a true audiophile performance. The SR20 steps things up a notch The SR10 and SR20’s playback capabilities also include a built- by offering the same flexible connectivity, but with an even more in FM/AM tuner, giving you access to all of your favourite radio powerful 100 watts per channel, driving virtually any loudspeaker stations with ease. We only use pure audiophile components, including discreet However you listen to your music, the SR10 and SR20 have it amplifiers, full metal chassis’ and high-performance toroidal covered. They boast a built-in phono stage so you can instantly transformers. The Topaz SR10 and SR20 are a winning connect a turntable, and a direct front panel input for iPods, combination of power, connectivity and purity, putting far more smart phones or MP3 players. -
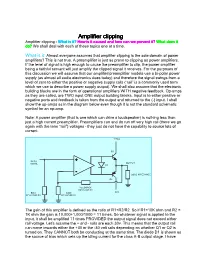
Amplifier Clipping
Amplifier clipping Amplifier clipping – What is it? How is it caused and how can we prevent itit???? What does it do? We shall deal with each of these topics one at a time. What is it: Almost everyone assumes that amplifier clipping is the sole domain of power amplifiers? This is not true. A preamplifier is just as prone to clipping as power amplifiers. If the level of signal is high enough to cause the preamplifier to clip, the power amplifier being a faithful servant will just amplify the clipped signal it receives. For the purposes of this discussion we will assume that our amplifier/preamplifier models use a bi-polar power supply (as almost all audio electronics does today) and therefore the signal swings from a level of zero to either the positive or negative supply rails (“rail” is a commonly used term which we use to describe a power supply output). We shall also assume that the electronic building blocks are in the form of operational amplifiers WITH negative feedback. Op-amps as they are called, are TWO input ONE output building blocks. Input is to either positive or negative ports and feedback is taken from the output and returned to the (-) input. I shall show the op-amps as in the diagram below even though it is not the standard schematic symbol for an op-amp. Note: A power amplifier (that is one which can drive a loudspeaker) is nothing less than just a high current preamplifier. Preamplifiers can and do run off very high rail (there we go again with the term “rail”) voltages – they just do not have the capability to source lots of current. -

Aliasing Reduction in Clipped Signals
This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Author(s): Fabián Esqueda, Stefan Bilbao and Vesa Välimäki Title: Aliasing reduction in clipped signals Year: 2016 Version: Author accepted / Post print version Please cite the original version: Fabián Esqueda, Stefan Bilbao and Vesa Välimäki. Aliasing reduction in clipped signals. IEEE Transactions on Signal Processing, Vol. 64, No. 20, pp. 5255-5267, October 2016. DOI: 10.1109/TSP.2016.2585091 Rights: © 2016 IEEE. Reprinted with permission. In reference to IEEE copyrighted material which is used with permission in this thesis, the IEEE does not endorse any of Aalto University's products or services. Internal or personal use of this material is permitted. If interested in reprinting/republishing IEEE copyrighted material for advertising or promotional purposes or for creating new collective works for resale or redistribution, please go to http://www.ieee.org/publications_standards/publications/rights/rights_link.html to learn how to obtain a License from RightsLink. This publication is included in the electronic version of the article dissertation: Esqueda, Fabián. Aliasing Reduction in Nonlinear Audio Signal Processing. Aalto University publication series DOCTORAL DISSERTATIONS, 74/2018. All material supplied via Aaltodoc is protected by copyright and other intellectual property rights, and duplication or sale of all or part of any of the repository collections is not permitted, except that material may be duplicated by you for your research use or educational purposes in electronic or print form. You must obtain permission for any other use. Electronic or print copies may not be offered, whether for sale or otherwise to anyone who is not an authorised user. -

“Flawless Audiophile Performance and a Design with The
Mc501 Monoblock Power Amplifier The MC501 Monoblock Power Amplifier has been designed to meet the expectations of “flawless audiophile the most demanding audiophile. Delegating an individual amplifier to each speaker eliminates any chance of interaction between channels and expanding into multi-channel performance and a formats is as easy as adding additional amplifiers. design with the future Quad-Differential Circuitry, exclusive to McIntosh, reduces noise and distortion to their in mind” lowest possible level. While the MC501 delivers a massive 500 watts continuous power Quad Balanced Design into 2, 4 or 8-Ohms and over 1200 watts of peak power into low impedances, its noise levels are 124dB below rated output. This means that the MC501 combines super-high Exclusive McIntosh Power Assurance System power with record-low levels of noise…nearly an impossible combination! High Output Current Capability The MC501 has a bold look yet is unmistakably a McIntosh. It features a 2-dimensional Wide Bandwidth glass front panel containing a large peak-responding true-wattmeter, all illuminated with cool running, ultra long-life LED fiber-optic lighting. The chassis gleams in polished stain- Fiber-Optic Illuminated 3D Glass Front Panel less steel and vertically mounted connectors at the back make attaching cables easier and takes up less shelf space. Both unbalanced and balanced inputs are provided along with three sets of huge, gold-plated speaker binding posts for high-performance speaker cables. l e g e n d a r y Mc501 Monoblock Power Amplifier EXCLUSIVE MCINTOSH POWER ASSURANCE SYSTEM A collection of technologies that enhance performance and reliability while protecting the amplifier and loudspeakers. -

Ibanez Tube Screamer® 808 History
© PDF by Plautz Ibanez Tube Screamer® 808 History The Ibanez Tube Screamer is an overdrive pedal. The most popular use of a tube screamer is to push a tube amp to make it overdrive more. The pedal has a characteristic mid-boosted tone popular with blues players. The "legendary" Tube Screamer has been used by guitarists such as Stevie Ray Vaughan to create their signature sound, and is one of the most popular and most copied overdrive pedals. Description When used with a tube amplifier the Tube Screamer increases the gain of the input signal, overloading the preamp and further distorting the signal. When used with a cranked master-volume type tube amplifier, this can result in much higher volumes than before the pedal is engaged if the preamp is not already turned up fairly high. Provided the preamp gain is already turned up, the Tube Screamer will saturate the signal, creating a thickly overdriven tone. The pedal has an overdrive knob, a tone knob, and a level knob. The drive knob controls the level of distortion, the tone knob adjusts the amount of treble in the sound, and the level knob controls the output volume of the pedal. The pedal can be used on a solid-state amp to try to mimic the sound of a vintage tube amp, although many guitarists prefer to use it to push a tube amp's pre-amp into an overdriven state. The classic Tube Screamer sound includes a "mid-hump," which means that the circuit accentuates frequencies between the bass and treble ranges (mid-frequencies). -

Guitar Effects System
Guitar Effects System 6.101 Final Project Spring 2020 Matt Johnston Table of Contents Overview ……………………………………… 1 Pedals Compression …………………………... 3 Overdrive ……………………………… 5 4-Band Equalization …………………... 7 PCB Layout …………………………………… 8 Lessons Learned ………………………………. 9 Conclusion ……………………………………. 10 1 Overview The design of the guitar pedal was motivated by the history of rock ‘n’ roll. When people first began playing electric guitar in the 1930’s, there were no specialized guitar amplifiers, so they simply hooked up the electrical signal from the guitar to an audio amplifier that would have otherwise been used for vocals. Thus, the sound that came from these speakers would be clean and accurate, which is great for vocals, but guitarists wanted to get more from their instruments. Using the early tube-style amplifiers, guitar players would turn up the volume all the way in order to force the output audio waveform beyond the limits of the amplifier, resulting in clipping of the waveform and a “crunchy” sound characteristic of rock music. While players loved the overdriven effect they achieved by turning the amp “up to 11,” this technique posed a risk of breaking the tubes in the amp and also resulted in a lot of angry neighbors. Moreover, as guitar and amplifier technology developed throughout the 1950’s and 1960’s, many amplifiers featured additional built-in effects such as reverb, vibrato, and echo. These effects gave guitarists access to a new mode of creativity, but the technology was cumbersome to use and often lacked the quality necessary to be put in to practice in a studio or live performance setting. -

Institutionen För Systemteknik Department of Electrical Engineering
Institutionen för systemteknik Department of Electrical Engineering Examensarbete Digital compensation of distortion in audio systems Examensarbete utfört i elektroniksystem vid Tekniska högskolan i Linköping av Fredrik Bengtsson, Rikard Berglund LiTH-ISY-EX--10/4367--SE Linköping 2010 Department of Electrical Engineering Linköpings tekniska högskola Linköpings universitet Linköpings universitet SE-581 83 Linköping, Sweden 581 83 Linköping Digital compensation of distortion in audio systems Examensarbete utfört i elektroniksystem vid Tekniska högskolan i Linköping av Fredrik Bengtsson, Rikard Berglund LiTH-ISY-EX--10/4367--SE Handledare: Kent Palmkvist isy, Linköpings universitet Pär Gunnars Risberg Actiwave AB Examinator: Kent Palmkvist isy, Linköpings universitet Linköping, 6 May, 2010 Avdelning, Institution Datum Division, Department Date Elektroniksystem Department of Electrical Engineering 2010-05-06 Linköpings universitet SE-581 83 Linköping, Sweden Språk Rapporttyp ISBN Language Report category — Svenska/Swedish Licentiatavhandling ISRN Engelska/English Examensarbete LiTH-ISY-EX--10/4367--SE C-uppsats Serietitel och serienummer ISSN D-uppsats Title of series, numbering — Övrig rapport URL för elektronisk version http://www.es.isy.liu.se http://www.ep.liu.se Titel Digital kompensering av distorsion i ljudsystem Title Digital compensation of distortion in audio systems Författare Fredrik Bengtsson, Rikard Berglund Author Sammanfattning Abstract The advancements of computational power in low cost FPGAs are giving the op- portunity to implement real-time compensation of loudspeakers and audio systems. The need for expensive commercial audio systems is reduced when the fidelity of much cheaper audio systems easily can be improved by real-time compensation. The topic of this thesis is to investigate and evaluate methods for digital com- pensation of distortion in audio systems. -

Restoration of Clipped Sound Signals - a Weighted Fourier Series and AR Approach
KTH May 19, 2013 Restoration of clipped sound signals - a weighted Fourier series and AR approach A bachelor thesis on Optimization Anders Gidmark Helena Olofson [email protected] [email protected] Supervisor: Per Enqvist SA104X Degree Project in Engineering Physics, First Level Department of Mathematics, Optimization and Systems Theory Royal Institute of Technology (KTH) Stockholm, Sweden Abstract Sound signals can be distorted in many dierent ways, one of them is called clipping. A clipped sound signal diers from a non-clipped signal in the way that the amplitudes of the sound wave that are higher than a certain amplitude threshold has been partially lowered or completely lowered to the threshold, the latter is called hard clipping. Since data is lost when a signal is clipped, there is an interest in restoring the signal. For a hard clipped signal, it is often impossible to perfectly restore the signal. In this thesis two dierent methods for partially restoring a symmetrically hard clipped signal are suggested. The two methods considered are a weighted Fourier series (WFS) t and an autoregressive (AR) model approach. Both methods attempt to restore the signal by solving optimization problems designed to min- imize the errors of the respective model. Evaluation and comparison of the two methods showed that the AR method typically performed better than the WFS method. The AR method was eec- tive at restoring the signal, while the WFS method stuck close to the clipped signal, which might be due to dierences in their optimization problems. Restoration of clipped sound signals Contents Contents 1 Introduction 1 2 Theory 1 2.1 Clipping in a loudspeaker system .