Package 'Calculus'
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Curl and Divergence
Sections 15.5-15.8: Divergence, Curl, Surface Integrals, Stokes' and Divergence Theorems Reeve Garrett 1 Curl and Divergence Definition 1.1 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the divergence of F on D is @ @ @ div F := r · F = ; ; · hf; g; hi = f + g + h ; @x @y @z x y z @ @ @ where r = h @x ; @y ; @z i is the del operator. If div F = 0, we say that F is source free. Note that these definitions (divergence and source free) completely agrees with their 2D analogues in 15.4. Theorem 1.2 Suppose that F is a radial vector field, i.e. if r = hx; y; zi, then for some real number p, r hx;y;zi 3−p F = jrjp = (x2+y2+z2)p=2 , then div F = jrjp . Theorem 1.3 Let F = hf; g; hi be a differentiable vector field defined on a region D of R3. Then, the curl of F on D is curl F := r × F = hhy − gz; fz − hx; gx − fyi: If curl F = 0, then we say F is irrotational. Note that gx − fy is the 2D curl as defined in section 15.4. Therefore, if we fix a point (a; b; c), [gx − fy](a; b; c), measures the rotation of F at the point (a; b; c) in the plane z = c. Similarly, [hy − gz](a; b; c) measures the rotation of F in the plane x = a at (a; b; c), and [fz − hx](a; b; c) measures the rotation of F in the plane y = b at the point (a; b; c). -

1.2 Topological Tensor Calculus
PH211 Physical Mathematics Fall 2019 1.2 Topological tensor calculus 1.2.1 Tensor fields Finite displacements in Euclidean space can be represented by arrows and have a natural vector space structure, but finite displacements in more general curved spaces, such as on the surface of a sphere, do not. However, an infinitesimal neighborhood of a point in a smooth curved space1 looks like an infinitesimal neighborhood of Euclidean space, and infinitesimal displacements dx~ retain the vector space structure of displacements in Euclidean space. An infinitesimal neighborhood of a point can be infinitely rescaled to generate a finite vector space, called the tangent space, at the point. A vector lives in the tangent space of a point. Note that vectors do not stretch from one point to vector tangent space at p p space Figure 1.2.1: A vector in the tangent space of a point. another, and vectors at different points live in different tangent spaces and so cannot be added. For example, rescaling the infinitesimal displacement dx~ by dividing it by the in- finitesimal scalar dt gives the velocity dx~ ~v = (1.2.1) dt which is a vector. Similarly, we can picture the covector rφ as the infinitesimal contours of φ in a neighborhood of a point, infinitely rescaled to generate a finite covector in the point's cotangent space. More generally, infinitely rescaling the neighborhood of a point generates the tensor space and its algebra at the point. The tensor space contains the tangent and cotangent spaces as a vector subspaces. A tensor field is something that takes tensor values at every point in a space. -

Curl, Divergence and Laplacian
Curl, Divergence and Laplacian What to know: 1. The definition of curl and it two properties, that is, theorem 1, and be able to predict qualitatively how the curl of a vector field behaves from a picture. 2. The definition of divergence and it two properties, that is, if div F~ 6= 0 then F~ can't be written as the curl of another field, and be able to tell a vector field of clearly nonzero,positive or negative divergence from the picture. 3. Know the definition of the Laplace operator 4. Know what kind of objects those operator take as input and what they give as output. The curl operator Let's look at two plots of vector fields: Figure 1: The vector field Figure 2: The vector field h−y; x; 0i: h1; 1; 0i We can observe that the second one looks like it is rotating around the z axis. We'd like to be able to predict this kind of behavior without having to look at a picture. We also promised to find a criterion that checks whether a vector field is conservative in R3. Both of those goals are accomplished using a tool called the curl operator, even though neither of those two properties is exactly obvious from the definition we'll give. Definition 1. Let F~ = hP; Q; Ri be a vector field in R3, where P , Q and R are continuously differentiable. We define the curl operator: @R @Q @P @R @Q @P curl F~ = − ~i + − ~j + − ~k: (1) @y @z @z @x @x @y Remarks: 1. -

A Some Basic Rules of Tensor Calculus
A Some Basic Rules of Tensor Calculus The tensor calculus is a powerful tool for the description of the fundamentals in con- tinuum mechanics and the derivation of the governing equations for applied prob- lems. In general, there are two possibilities for the representation of the tensors and the tensorial equations: – the direct (symbolic) notation and – the index (component) notation The direct notation operates with scalars, vectors and tensors as physical objects defined in the three dimensional space. A vector (first rank tensor) a is considered as a directed line segment rather than a triple of numbers (coordinates). A second rank tensor A is any finite sum of ordered vector pairs A = a b + ... +c d. The scalars, vectors and tensors are handled as invariant (independent⊗ from the choice⊗ of the coordinate system) objects. This is the reason for the use of the direct notation in the modern literature of mechanics and rheology, e.g. [29, 32, 49, 123, 131, 199, 246, 313, 334] among others. The index notation deals with components or coordinates of vectors and tensors. For a selected basis, e.g. gi, i = 1, 2, 3 one can write a = aig , A = aibj + ... + cidj g g i i ⊗ j Here the Einstein’s summation convention is used: in one expression the twice re- peated indices are summed up from 1 to 3, e.g. 3 3 k k ik ik a gk ∑ a gk, A bk ∑ A bk ≡ k=1 ≡ k=1 In the above examples k is a so-called dummy index. Within the index notation the basic operations with tensors are defined with respect to their coordinates, e. -

Tensor Calculus and Differential Geometry
Course Notes Tensor Calculus and Differential Geometry 2WAH0 Luc Florack March 10, 2021 Cover illustration: papyrus fragment from Euclid’s Elements of Geometry, Book II [8]. Contents Preface iii Notation 1 1 Prerequisites from Linear Algebra 3 2 Tensor Calculus 7 2.1 Vector Spaces and Bases . .7 2.2 Dual Vector Spaces and Dual Bases . .8 2.3 The Kronecker Tensor . 10 2.4 Inner Products . 11 2.5 Reciprocal Bases . 14 2.6 Bases, Dual Bases, Reciprocal Bases: Mutual Relations . 16 2.7 Examples of Vectors and Covectors . 17 2.8 Tensors . 18 2.8.1 Tensors in all Generality . 18 2.8.2 Tensors Subject to Symmetries . 22 2.8.3 Symmetry and Antisymmetry Preserving Product Operators . 24 2.8.4 Vector Spaces with an Oriented Volume . 31 2.8.5 Tensors on an Inner Product Space . 34 2.8.6 Tensor Transformations . 36 2.8.6.1 “Absolute Tensors” . 37 CONTENTS i 2.8.6.2 “Relative Tensors” . 38 2.8.6.3 “Pseudo Tensors” . 41 2.8.7 Contractions . 43 2.9 The Hodge Star Operator . 43 3 Differential Geometry 47 3.1 Euclidean Space: Cartesian and Curvilinear Coordinates . 47 3.2 Differentiable Manifolds . 48 3.3 Tangent Vectors . 49 3.4 Tangent and Cotangent Bundle . 50 3.5 Exterior Derivative . 51 3.6 Affine Connection . 52 3.7 Lie Derivative . 55 3.8 Torsion . 55 3.9 Levi-Civita Connection . 56 3.10 Geodesics . 57 3.11 Curvature . 58 3.12 Push-Forward and Pull-Back . 59 3.13 Examples . 60 3.13.1 Polar Coordinates in the Euclidean Plane . -

10A– Three Generalizations of the Fundamental Theorem of Calculus MATH 22C
10A– Three Generalizations of the Fundamental Theorem of Calculus MATH 22C 1. Introduction In the next four sections we present applications of the three generalizations of the Fundamental Theorem of Cal- culus (FTC) to three space dimensions (x, y, z) 3,a version associated with each of the three linear operators,2R the Gradient, the Curl and the Divergence. Since much of classical physics is framed in terms of these three gener- alizations of FTC, these operators are often referred to as the three linear first order operators of classical physics. The FTC in one dimension states that the integral of a function over a closed interval [a, b] is equal to its anti- derivative evaluated between the endpoints of the interval: b f 0(x)dx = f(b) f(a). − Za This generalizes to the following three versions of the FTC in two and three dimensions. The first states that the line integral of a gradient vector field F = f along a curve , (in physics the work done by F) is exactlyr equal to the changeC in its potential potential f across the endpoints A, B of : C F Tds= f(B) f(A). (1) · − ZC The second, called Stokes Theorem, says that the flux of the Curl of a vector field F through a two dimensional surface in 3 is the line integral of F around the curve that S R 1 C 2 bounds : S CurlF n dσ = F Tds (2) · · ZZS ZC And the third, called the Divergence Theorem, states that the integral of the Divergence of F over an enclosed vol- ume is equal to the flux of F outward through the two dimensionalV closed surface that bounds : S V DivF dV = F n dσ. -

Fast Higher-Order Functions for Tensor Calculus with Tensors and Subtensors
Fast Higher-Order Functions for Tensor Calculus with Tensors and Subtensors Cem Bassoy and Volker Schatz Fraunhofer IOSB, Ettlingen 76275, Germany, [email protected] Abstract. Tensors analysis has become a popular tool for solving prob- lems in computational neuroscience, pattern recognition and signal pro- cessing. Similar to the two-dimensional case, algorithms for multidimen- sional data consist of basic operations accessing only a subset of tensor data. With multiple offsets and step sizes, basic operations for subtensors require sophisticated implementations even for entrywise operations. In this work, we discuss the design and implementation of optimized higher-order functions that operate entrywise on tensors and subtensors with any non-hierarchical storage format and arbitrary number of dimen- sions. We propose recursive multi-index algorithms with reduced index computations and additional optimization techniques such as function inlining with partial template specialization. We show that single-index implementations of higher-order functions with subtensors introduce a runtime penalty of an order of magnitude than the recursive and iterative multi-index versions. Including data- and thread-level parallelization, our optimized implementations reach 68% of the maximum throughput of an Intel Core i9-7900X. In comparison with other libraries, the aver- age speedup of our optimized implementations is up to 5x for map-like and more than 9x for reduce-like operations. For symmetric tensors we measured an average speedup of up to 4x. 1 Introduction Many problems in computational neuroscience, pattern recognition, signal pro- cessing and data mining generate massive amounts of multidimensional data with high dimensionality [13,12,9]. Tensors provide a natural representation for massive multidimensional data [10,7]. -

Approaching Green's Theorem Via Riemann Sums
APPROACHING GREEN’S THEOREM VIA RIEMANN SUMS JENNIE BUSKIN, PHILIP PROSAPIO, AND SCOTT A. TAYLOR ABSTRACT. We give a proof of Green’s theorem which captures the underlying intuition and which relies only on the mean value theorems for derivatives and integrals and on the change of variables theorem for double integrals. 1. INTRODUCTION The counterpoint of the discrete and continuous has been, perhaps even since Eu- clid, the essence of many mathematical fugues. Despite this, there are fundamental mathematical subjects where their voices are difficult to distinguish. For example, although early Calculus courses make much of the passage from the discrete world of average rate of change and Riemann sums to the continuous (or, more accurately, smooth) world of derivatives and integrals, by the time the student reaches the cen- tral material of vector calculus: scalar fields, vector fields, and their integrals over curves and surfaces, the voice of discrete mathematics has been obscured by the coloratura of continuous mathematics. Our aim in this article is to restore the bal- ance of the voices by showing how Green’s Theorem can be understood from the discrete point of view. Although Green’s Theorem admits many generalizations (the most important un- doubtedly being the Generalized Stokes’ Theorem from the theory of differentiable manifolds), we restrict ourselves to one of its simplest forms: Green’s Theorem. Let S ⊂ R2 be a compact surface bounded by (finitely many) simple closed piecewise C1 curves oriented so that S is on their left. Suppose that M F = is a C1 vector field defined on an open set U containing S. -

External Aerodynamics of the Magnetosphere
’ .., NASA TECHNICAL NOTE NASA TN- I- &: I -I LOAN COPY: R AFWL (W KIRTLAND AFI EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE by John R. Spreiter, A Zbertu Y. A Zksne, and Audrey L. Summers Awes Research Center Moffett Fie@ CuZ$ NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. JUNE 1968 i TECH LIBRARY KAFB, NM Illll1lllll111lll lllll lilll llll lllll 1111 Ill 0133359 EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE By John R. Spreiter, Alberta Y. Alksne, and Audrey L. Summers Ames Research Center Moffett Field, Calif. NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - CFSTl price $3.00 EXTERNAL AERODYNAMICS OF THE MAGNETOSPHERE* By John R. Spreiter, Alberta Y. Alksne, and Audrey L. Summers Ames Research Center SUMMARY A comprehensive survey is given of the continuum fluid theory of the solar wind and its interaction with the Earth's magnetic field, and the rela- tion between the calculated results and those actually measured in space. A unified basis for the entire discussion is provided by the equations of mag- netohydrodynamics, augmented by relations from kinetic theory for certain small-scale details of the flow. While the full complexity of magnetohydrodynamics is required for the formulation of the model and the establishment of the proper conditions to apply at the magnetosphere boundary, it is shown that the magnetic field actually experienced in space is usually sufficiently small that an adequate approximation to the solution can be obtained by first solving the simpler equations of gasdynamics for the flow and then using the results to calculate the deformation of the magnetic field. -

Part IA — Vector Calculus
Part IA | Vector Calculus Based on lectures by B. Allanach Notes taken by Dexter Chua Lent 2015 These notes are not endorsed by the lecturers, and I have modified them (often significantly) after lectures. They are nowhere near accurate representations of what was actually lectured, and in particular, all errors are almost surely mine. 3 Curves in R 3 Parameterised curves and arc length, tangents and normals to curves in R , the radius of curvature. [1] 2 3 Integration in R and R Line integrals. Surface and volume integrals: definitions, examples using Cartesian, cylindrical and spherical coordinates; change of variables. [4] Vector operators Directional derivatives. The gradient of a real-valued function: definition; interpretation as normal to level surfaces; examples including the use of cylindrical, spherical *and general orthogonal curvilinear* coordinates. Divergence, curl and r2 in Cartesian coordinates, examples; formulae for these oper- ators (statement only) in cylindrical, spherical *and general orthogonal curvilinear* coordinates. Solenoidal fields, irrotational fields and conservative fields; scalar potentials. Vector derivative identities. [5] Integration theorems Divergence theorem, Green's theorem, Stokes's theorem, Green's second theorem: statements; informal proofs; examples; application to fluid dynamics, and to electro- magnetism including statement of Maxwell's equations. [5] Laplace's equation 2 3 Laplace's equation in R and R : uniqueness theorem and maximum principle. Solution of Poisson's equation by Gauss's method (for spherical and cylindrical symmetry) and as an integral. [4] 3 Cartesian tensors in R Tensor transformation laws, addition, multiplication, contraction, with emphasis on tensors of second rank. Isotropic second and third rank tensors. -

Stokes' Theorem
V13.3 Stokes’ Theorem 3. Proof of Stokes’ Theorem. We will prove Stokes’ theorem for a vector field of the form P (x, y, z) k . That is, we will show, with the usual notations, (3) P (x, y, z) dz = curl (P k ) · n dS . � C � �S We assume S is given as the graph of z = f(x, y) over a region R of the xy-plane; we let C be the boundary of S, and C ′ the boundary of R. We take n on S to be pointing generally upwards, so that |n · k | = n · k . To prove (3), we turn the left side into a line integral around C ′, and the right side into a double integral over R, both in the xy-plane. Then we show that these two integrals are equal by Green’s theorem. To calculate the line integrals around C and C ′, we parametrize these curves. Let ′ C : x = x(t), y = y(t), t0 ≤ t ≤ t1 be a parametrization of the curve C ′ in the xy-plane; then C : x = x(t), y = y(t), z = f(x(t), y(t)), t0 ≤ t ≤ t1 gives a corresponding parametrization of the space curve C lying over it, since C lies on the surface z = f(x, y). Attacking the line integral first, we claim that (4) P (x, y, z) dz = P (x, y, f(x, y))(fxdx + fydy) . � C � C′ This looks reasonable purely formally, since we get the right side by substituting into the left side the expressions for z and dz in terms of x and y: z = f(x, y), dz = fxdx + fydy. -
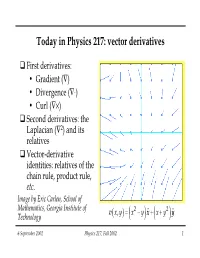
Today in Physics 217: Vector Derivatives
Today in Physics 217: vector derivatives First derivatives: • Gradient (—) • Divergence (—◊) •Curl (—¥) Second derivatives: the Laplacian (—2) and its relatives Vector-derivative identities: relatives of the chain rule, product rule, etc. Image by Eric Carlen, School of Mathematics, Georgia Institute of 22 vxyxy, =−++ x yˆˆ x y Technology ()()() 6 September 2002 Physics 217, Fall 2002 1 Differential vector calculus df/dx provides us with information on how quickly a function of one variable, f(x), changes. For instance, when the argument changes by an infinitesimal amount, from x to x+dx, f changes by df, given by df df= dx dx In three dimensions, the function f will in general be a function of x, y, and z: f(x, y, z). The change in f is equal to ∂∂∂fff df=++ dx dy dz ∂∂∂xyz ∂∂∂fff =++⋅++ˆˆˆˆˆˆ xyzxyz ()()dx() dy() dz ∂∂∂xyz ≡⋅∇fdl 6 September 2002 Physics 217, Fall 2002 2 Differential vector calculus (continued) The vector derivative operator — (“del”) ∂∂∂ ∇ =++xyzˆˆˆ ∂∂∂xyz produces a vector when it operates on scalar function f(x,y,z). — is a vector, as we can see from its behavior under coordinate rotations: I ′ ()∇∇ff=⋅R but its magnitude is not a number: it is an operator. 6 September 2002 Physics 217, Fall 2002 3 Differential vector calculus (continued) There are three kinds of vector derivatives, corresponding to the three kinds of multiplication possible with vectors: Gradient, the analogue of multiplication by a scalar. ∇f Divergence, like the scalar (dot) product. ∇⋅v Curl, which corresponds to the vector (cross) product. ∇×v 6 September 2002 Physics 217, Fall 2002 4 Gradient The result of applying the vector derivative operator on a scalar function f is called the gradient of f: ∂∂∂fff ∇f =++xyzˆˆˆ ∂∂∂xyz The direction of the gradient points in the direction of maximum increase of f (i.e.