US 200900 12690A1 (19) United States (12) Patent Application Publication (10) Pub. No.: US 2009/0012690 A1 Trotter et al. (43) Pub. Date: Jan. 8, 2009
(54) VEHICLE DESCENT CONTROL Publication Classification (76) Inventors: Loren M. Trotter, Linden, MI (51) Int.B60T Cl. 7/2 (2006.01) (US); Adam C. Chiappetta, Rochester Hills, MI (US) (52) U.S. Cl...... 701/83 Correspondence Address: DAMLERCHRYSLER INTELLECTUAL CAP- (57) ABSTRACT TAL CORPORATION CMS 483-02-19 Vehicle descent is controlled in at least one implementation 800 CHRYSLER OR EAST by comparing an engine braking torque to a target engine AUBURN HILLS, MI 48326-2757 (US) braking torque, and controlling one or more vehicle brakes to maintain the engine braking torque Substantially at the target (21) Appl. No.: 11/773,806 engine braking torque. The target engine braking torque may be varied as a function of one or more factors or conditions, (22) Filed: Jul. 5, 2007 Such as accelerator position or brake application pressure.
SART s so-o- s S's
“’ RECEIV:r * - St SwDESCEN St. ''-' isi Mois.. - Sign AL s co 8 S
Y NycArgoN or vesic Escxt it. Monitor ENGINE brakingi Y warar Toroug (EBT) so raxarkara-kaaaaaaaaaaaaaaarasssssssaxxaaaaaaaaauxus-areasierrerrrrrrrrrrrrrrrrrr. s
& SSSRMS SEA A38&SST E3 SE3) -r-225
y S.SENSE WSSES SPEED 1. senseawe-a- 8-Ms. 4. :3 DS's ERMNE is WEEIS). LOCKED J OR S.pNs &S. S. W S Y W
K.S.S.SYSSE/AS Y 38AKES is WSSESS Sixx S.S. Psi Sig 2. WARY S S ASA JNCSON OF WISEL SEED & -- Fron 28 Patent Application Publication Jan. 8, 2009 Sheet 1 of 3 US 2009/0012690 A1
N s - -- Y-\&
s ********************* 42.7" ?----4e-*************************************~~~*~~~~~~~); 83 Aaaa x-rayaaaassassssssssss
svaayaasaxx-x-xx-was sy 8. ||~~~~……..** *******
S
Y
------&--
?…------** ~~~~~~~~~
************?>>>>>>>>>>>>>>>>>>>>>>>;~~ ;--~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ %.………………………………………-- ?_º^{…]|------&~~~~~~~ . Patent Application Publication Jan. 8, 2009 Sheet 2 of 3 US 2009/0012690 A1
more recocio-or-raitreceivi DiscNi Moise signAi. arrierreraaaaaaaaaaaaaaaaaaaaaaaaaaa
-xy res: N I { A. SYN . WSS S.E 3. Six's pro-oo: MONITOR ENGINE BRAKING TORQUE (EBT) |-220
SS E A A&E ESS EET -22 8 r-...-a,c- -- 33 SENSE WEE, SSESSES -
w ruarararate rMiNE FWHEEistockers U & S.S.; N &
s spry sr Akss is wages sockey
or -285 WARY SS3 SAS AS, JNCSYN OF W is SL SEE3 is raaaaa.
Fi{ }, : FIG. 2A Patent Application Publication Jan. 8, 2009 Sheet 3 of 3 US 2009/0012690 A1
's 24
--DFERMNE TRANSMission RAtto -250 VARY TEBTASA FUNCTON OF TRANS, RATO-255
-o-axey----...-a- RMNEACCELERATOR position -- vary------a-a-a-a-a-a------rest. As A FUNCTion rece-mo of Accrier Arror position-265
BSSR SN3, SSRAKE, RESSSE -o-2 :
s WARY SER's ASA FUNCION OF BRAKE PRSS SRE- 2:5 se------a------coMPARE SET resis -280 —— Apply brakes is EBT steer r
rrrrrrrrrr cric 8 xx-cc-aa
out RELEASE BRAKES IF EBT
F.G. 2B US 2009/00 12690 A1 Jan. 8, 2009
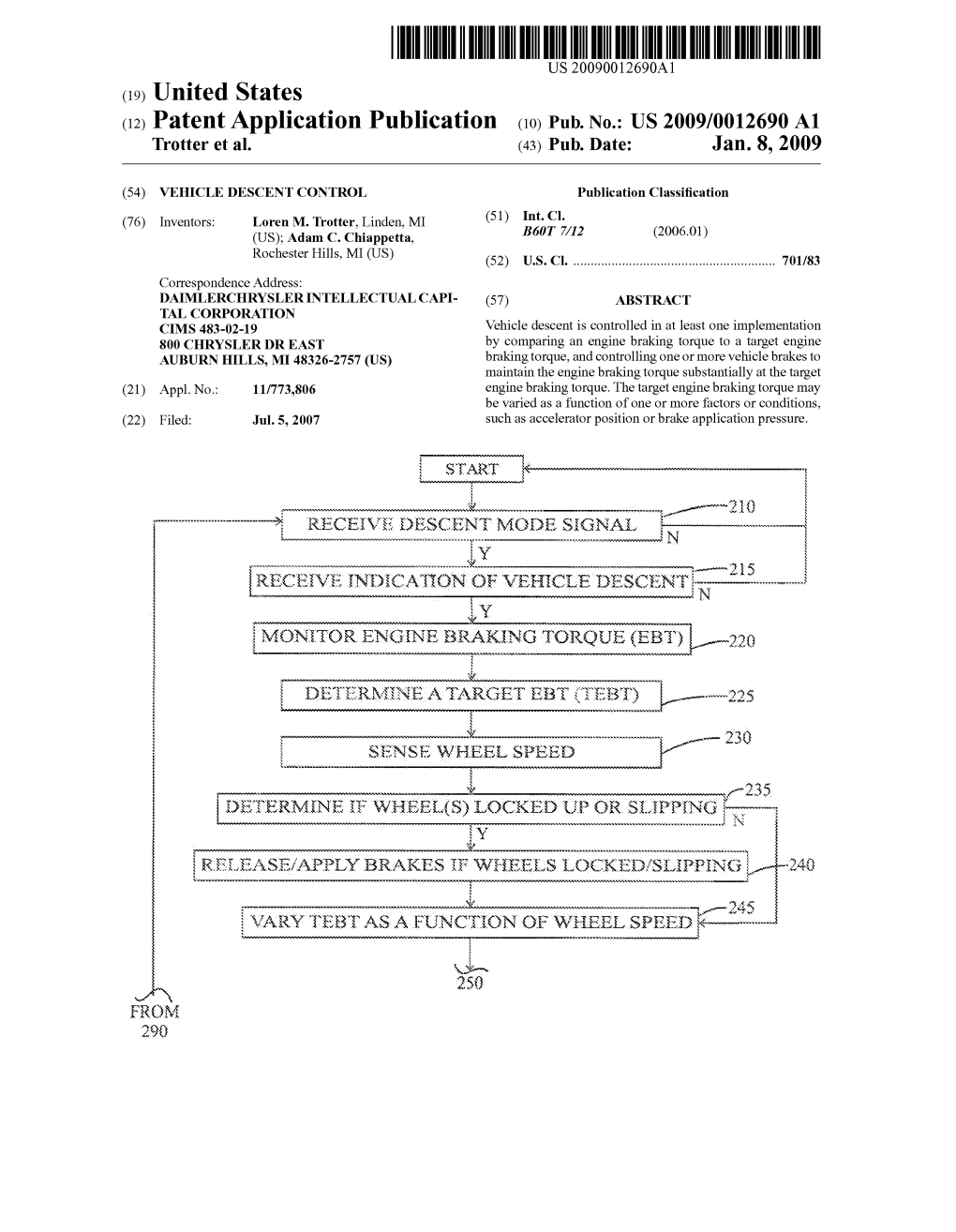
VEHICLE DESCENT CONTROL ing torque, which may be varied as a function of at least one of accelerator position or brake application pressure. FIELD OF THE INVENTION BRIEF DESCRIPTION OF THE DRAWINGS 0001. The present invention relates generally to vehicle 0007. The following detailed description of preferred controls, and more particularly to controlling descent of a embodiments and best mode will be set forth with reference to vehicle along sloped terrain. the accompanying drawings, in which: 0008 FIG. 1 is a schematic view of an embodiment of a BACKGROUND OF THE INVENTION vehicle including apparatus to carry out vehicle descent con 0002 Engine braking is used to control descent of a trol; and vehicle traveling along sloped terrain. Engine braking uses a 0009 FIG. 2 is a flow chart of an embodiment of a method compression stroke of the vehicle's internal combustion of vehicle descent control. engine to dissipate energy transmitted to the engine from the vehicle's wheels through the vehicle's driveline and transmis DETAILED DESCRIPTION OF PREFERRED sion. A vehicle driver may downshift the transmission into a EMBODIMENTS lower transmission speed ratio and rely on engine braking to 0010 Referring, in more detail to the drawings, FIG. 1 slow a descending vehicle. But on steep off-road terrain, illustrates a schematic diagram of an exemplary vehicle 10 engine braking alone may be insufficient, even in the lowest configured for automatically controlled descent based on transmission speed ratio. Therefore, vehicle descent may be engine braking torque. The vehicle 10 may include a chassis further controlled by automatically controlling the vehicle's system 12 including wheels 14, a drivetrain system 16 to brakes to Supplement the engine braking. rotate the wheels 14, and a driver interface 18 in communi 0003 For example, so-called hill descent control (HDC) cation with the chassis and drivetrain systems 12, 16. systems maintain a constant low speed of a vehicle descend 0011. The driver interface 18 receives input from and ing a steep hill without driver input. More specifically, HDC transmits output to a vehicle driver. The driver interface 18 systems detect vehicle speed via wheel rotation, compare the generally can include input devices 20 to receive commands detected vehicle speed to a target vehicle speed, and apply the or requests from the driver, and output devices 22 to transmit vehicle's brakes when the detected vehicle speed exceeds the vehicle information back to the driver. The output devices 22 target vehicle speed. But this approach may not be optimal for of the driver interface may Include a traction control system all situations, such as when vehicle speed is difficult to assess (TCS) lamp 24, an anti-lock braking system (ABS) lamp 26, because the vehicle's wheels are slipping, freewheeling, or a transmission mode display 28, a descent, control system momentarily locked up by the vehicle's brakes. (DCS) lamp 30, or the like. The driverinterface input, devices 20 may include an accelerator sensor 32 that may be coupled SUMMARY OF THE INVENTION to an accelerator pedal or the like (not shown), and a brake sensor 34 that may be coupled to a brake pedal or the like (not 0004 An implementation of a presently preferred method shown). The input devices 20 may further include a transmis of controlling descent of a vehicle includes monitoring sion mode sensor 36 that may be coupled to a transmission engine braking torque and comparing engine braking torque selector or the like (not shown) to receive requests from the to a target engine braking torque. One or more brakes are driver for different modes of transmission operation, and a applied when the engine braking torque is less than the target descent mode sensor 38 that may be coupled to a descent engine braking torque, and released when the engine braking mode Switch of any kind (not shown). For example, a vehicle torque is greater than or equal to the target engine braking driver may activate the descent mode switch and sensor 38 torque. Accordingly, descent of the vehicle may be automati when the driver desires to descend sloped terrain using auto cally controlled without a driver having to manually apply the matic control. brakes. 0012. The drivetrain system 16 generates, multiplies, and 0005. An implementation of a presently preferred vehicle conveys rotational power to the wheels 14 to propel the includes a plurality of wheels, a plurality of brakes for slow vehicle 10 down the road. The drivetrain system 16 may ing rotation of the wheels, a driveline coupled to at least one include a powertrain 40 to develop rotational, power and a of the wheels, a transmission coupled to the drive-line, and an driveline 42 coupled between the powertrain 40 and the engine coupled to the transmission. The vehicle also includes wheels 14 to deliver the rotational power from the powertrain at least one controller to control engine and brake operation 40 to the wheels 14 and against, terrain to propel the vehicle and carry out the following steps: comparing actual engine 10 along the terrain. The powertrain 40 may include an engine braking torque to a target engine braking torque; applying at 44 to generate rotational power and a transmission 46 coupled least one of the brakes when actual engine braking torque is to the engine 44 to leverage the rotational power of the engine less than the target engine braking torque; and releasing the 44. The engine 44 may also provide engine braking torque to brake(s) when actual engine braking torque is greater than the dissipate energy transmitted to the engine 44 from the vehi target engine braking torque. cle's wheels 14 through the vehicle's driveline 42 and trans 0006 Another implementation of a presently preferred mission 46 and thereby slow vehicle descent. The driveline 42 method includes controlling descent of a vehicle automati may include a torque transfer device 48 Such as an axle, cally without a driver having to manually apply brakes of the differential, transfer case, or the like, and shafts 50 such as vehicle. According to the method, an engine braking torque is driveshafts, halfshafts, or the like. compared to a target engine braking torque, and one or more 0013 The drivetrain system 16 may also include one or of the brakes of the vehicle are controlled so as to maintain the more drivetrain controllers 52 to receive input from various engine braking torque Substantially at the target engine brak vehicle sensors, process the input with programs and data, US 2009/00 12690 A1 Jan. 8, 2009
and transmit output to other vehicle components or systems. chassis sensors may also include the descent mode sensor 38. The drivetrain controller(s) 52 may include one or more and a vehicle descent sensor 76 carried by the vehicle 10 such engine and/or transmission controllers, which may be sepa as a longitudinal accelerometer, Inclinometer, or the like. The rate or integrated into one or more units. The drivetrain sys vehicle descent sensor 76 may sense when the vehicle 10 is in tem 10 may also include drivetrain sensors, which may descent, such as traversing a downward slope of terrain. include the accelerator sensor 32 to indicate commanded 0017. The chassis system controller 72 may include one or engine performance (e.g. demanded torque), an engine more of an anti-lock braking system (ABS) controller, an throttle sensor 54 coupled to an engine throttle (not shown) to electronic stability program (ESP) controller, a traction con indicate engine demand or load, an engine speed sensor 56 trol system (TCS) controller, a hill descent controller (HDC), coupled to a rotational component of the engine 44 such as a or the like. Such controllers may be separate or may be crankshaft, camshaft, or the like, and one or more transmis integrated into one or more units. In any case, the controllers sion speed sensors 58, which may be used to indicate trans 72 may include one or more processors 78 to execute instruc mission speed ratio(s). Any other drivetrain sensors may be tions using sensor input and data, and memory 80 coupled to used. Such as to indicate torque, speed, or any other param the processors) 78 in any manner thereto and configured to eter, of any of the engine 44, transmission 46, torque transfer store the instructions, sensor input, and data. The instructions device 48, or the like. The drivetrain controller 52 may can include algorithms to determine any chassis parameters include one or more processors 60 to execute instructions including wheel speed, wheel lock up, wheel slippage or using sensor input and data, and memory 62 coupled to the freewheeling, vehicle inclination or declination, brake pres processor(s) 60 in any manner thereto and configured to store sure(s), and/or the like. From the chassis controller 72, chas the instructions, sensor input, and data. The instructions may sis controller output signals may be output to the vehicle include algorithms to determine any drivetrain parameters braking system 68, and one or more other vehicle controllers including engine torque, transmission speed rations), and the such as the drivetrain controller 52. like. 0018 FIG. 2 illustrates an embodiment of a method 200 of 0014. The engine torque can be determined in any suit automatically controlling descent of a vehicle. Such as the able, manner, including directly from one or more engine vehicle 10 of FIG.1. Generally, according to the method 200, torque sensors (not shown), or indirectly from monitoring descent of a vehicle may be controlled based on engine brak other drivetrain parameters and then calculating or looking up ing torque, and without driver input. Such as a driver manually engine torque based on those parameters. For example, applying the brakes 70 of the vehicle 10. Nonetheless, the engine torque may be inferred from monitoring and process method 200 may be carried out despite a driver applying the ing of signals from any suitable engine sensors, such as the brakes 70 or applying an accelerator. The method 200 may be throttle position sensor 54, an engine pressure sensor 64 Such carried out in any suitable sequence of two or more of its as a manifold pressure sensor or cylinder pressure sensor, steps. In other words, 200 the method need not include all of and/or the like, using engine torque look up tables, maps, or the steps nor in the exact sequence described. The method 200 the like. From the controller 52, drivetrain controller signals may be manifested in a Software program stored and imple may be output to the engine 44, transmission 46, torque mented by one or more vehicle controllers such as the chassis transfer device 48, and one or more other vehicle controllers controller 72 and/or drivetrain controller 52. Also, the method such as via a controller area network (CAN) 66. 200 may be an individual sub-routine of a comprehensive 0015 The chassis system 12 may structurally support the vehicle control program, may be distributed as various steps drivetrain system 16 in any Suitable manner and, generally, throughout Such a control program, or may be a stand-alone may also enable vehicle steering, Suspension, braking, and descent control program, or the like. the like. The chassis system 12 may include the wheels 14, a 0019. At step 210, a descent modesignal may be received, vehicle braking system 68 that may include wheel brakes 70 such as by the chassis controller 72 from the descent mode to slow rotation of the wheels 14 and one or more chassis switch38. The descent modesignal may be used to initiate the controllers 72 to control vehicle braking, and the like. The Subsequent method steps. For example, if the descent mode vehicle braking system 68 is configured to slow the speed of signal is not received, then the method 200 may loop back to the vehicle 10, such as by applying the wheel brakes 70 to start as shown. However, the rest of the method 200 may be fractionally engage the wheels 14 to slow rotation thereof. carried out with or without receiving the descent modesignal. The vehicle braking system 68 may include any suitable type 0020. At step 215, an indication of vehicle descent may be of vehicle brakes including the wheel brakes 70, drivetrain received, such, as by the chassis controller 72 from the vehicle braking devices, or the like. For example, the wheel brakes 70 descent sensor 76. The vehicle descent indication may be may be part of a wheel braking system including a master received before proceeding with the subsequent method cylinder, brake fluid reservoir, brake booster, brake fluid cir steps. For example, if the indication is not received, then the cuits including valves, hoses, pipes, and the like (not all method may loop back to start as shown. Alternatively, the shown). The wheel brakes 70 may include caliper disc brakes, indication need not be received such that the method 200 may drum brakes, or the like. be performed as a default operation, regardless of whether the 0016. The chassis controller(s) 72 receives input from vehicle is in descent or not. For example, a vehicle may various sensors, processes the input with programs and data, descend a sloped terrain, then encounter a generally flat or and transmits output to other vehicle components or systems. horizontal terrain before descending another sloped terrain, The sensors may include any vehicle sensors such as the in this case, a vehicle driver may find it annoying to have the drivetrain sensors 32, 54, 64, or chassis sensors. For example, vehicle Switch in and out of the automatic vehicle descent the chassis sensors may include wheel speed sensors 74. Such control mode. In such a case, the method 200 may be con as proximity sensors operatively coupled to toothed portions tinuously active. of the wheels 14, the brake sensor 34, or a hydraulic pressure 0021. At step 220, engine braking torque may be moni sensor in a brake fluid circuit (not shown), or the like. The tored, such as by the chassis controller 72 via the drivetrain US 2009/00 12690 A1 Jan. 8, 2009
controller 52. For example, the drivetrain controller 52 may position from the engine controller 52, and may decrease the determine engine braking torque in any manner and transmit target engine braking torque as the accelerator position engine braking torque signals to the chassis controller 72, advances and increase the target engine braking torque as such as via the CAN 66. Those skilled in the art will recognize accelerator position retracts. Accordingly, the method may be that engine braking torque may be synonymous with negative carried out with driver input, such as when a driver depresses engine torque, engine drag torque, or engine coasting torque. an accelerator pedal. In other words, engine torque may encompass both positive 0031. At step 270, brake application pressure may be engine torque and negative engine torque (engine braking sensed. For example, the brake pressure sensor 34 may be torque). used to sense pressure that a driver applies to a brake pedal. 0022. At step 225, a target engine braking torque may be 0032. At step 275, target engine braking torque may be determined. For example, the drivetrain controller 52 may varied as a function of brake application pressure. For receive engine braking torque signals by monitoring other example, the chassis controller 72 may decrease target engine drivetrain parameters and then calculating or looking up braking torque as brake application pressure increases and engine braking torque based on those parameters. More spe may increase target engine braking torque as brake applica cifically, engine braking torque may be calibrated and tion pressure decreases. Accordingly, the method may be inferred from monitoring and processing of signals from the carried out with driver input, such as when a driver depresses throttle position sensor 54, the engine pressure sensor 64. a brake pedal. and/or other like sensors, using engine braking torque formu 0033. At step 280, engine braking torque may be com las, look up tables, maps, and/or the like. pared to a target engine braking torque. The target engine 0023. At step 230, wheel speed may be sensed. For braking torque may be developed and calibrated by empirical example, the wheel speed sensors 74 may sense speed of the testing, formulaic modeling, theoretical calculations, or the wheels 14 and convey sensor signals to one or both of the like, and may vary for each type of vehicle, vehicle configu controllers 52, 72. ration, or the like. For example, models may be developed 0024. At step 235, wheel speed may be monitored for from actual testing and may include lookup tables, formulas, wheel lock up and/or slippage. For example, the chassis con maps, and/or the like that may cross-reference target engine troller 72 may monitor the wheel speed from the sensors 74 braking torque values with other vehicle parameter values. for any slippage or lock up of the wheels 14. If there is no The target engine braking torque may be varied according to wheel slippage and no lock up, then the method may proceed any suitable vehicle parameters such as transmission speed to step 245, otherwise to step 240. ratio, accelerator position, vehicle declination, braking force, 0025. At step 240, brakes may be automatically released to wheel speed, wheel slippage, wheel lock-up, and/or the like. avoid wheel lock up, and automatically applied to avoid 0034. Thereafter, brakes may be automatically controlled wheel slippage. For example, the chassis controller 72 may So as to help maintain engine braking torque Substantially at send output signals to the brakes 70 to release them, if wheel the target engine braking torque. The target engine braking lock up is detected, or to apply them if wheel slippage is torque may include a setpoint value, a range of values, or the detected, such as via ABS controls. like. Accordingly, the engine braking torque, may be main 0026. At step 245, target engine braking torque may be tained substantially at the target, when the engine braking varied as a function, of the sensed wheel speed. For example, torque is within a target engine braking torque range, or the chassis controller 72 may increase target engine braking within a predetermined percentage of a target engine braking torque as wheel speed increases, and decrease target engine torque setpoint, or the like. In other words, the brakes may be braking torque as wheel speed decreases. automatically controlled to Supplement engine braking 0027. At step 250, a transmission speed ratio may be deter torque. Such as when engine braking torque alone is insuffi mined. For example, the engine controller 52 may receive cient to automatically control vehicle descent. input signals from the transmission speed sensors 58 and may 0035. For example, at step 285, one or more brakes may be determine the transmission speed ratio(s) by cross referenc applied when engine braking torque is less than a target ing known transmission speed ratios with the speed sensor engine braking torque. For example, if engine braking torque signals with or without other sensor signals. Those skilled in falls below a target value or target range of values, then the the art will recognize that transmission speed ratio(s) may be chassis controller 72 may transmit Suitable signal(s) to apply determined in any suitable manner. one or more of the brakes 70. As used herein, the term “apply 0028. At step 255, a target engine braking torque may be brakes includes increasing braking pressure. Accordingly, varied as a function of transmission speed ratio. For example, descent of the vehicle is automatically controlled such that a the chassis controller 72 may receive the detected transmis driver does not have to manually apply the brakes. sion speed ratio from the engine controller 52, and may 0036. In another example, at step 290, one or more brakes increase the target engine braking torque as the transmission may be released when engine braking torque is greater than a speed ratio increases and decrease the target engine braking target engine braking torque. For example, if engine braking torque as the transmission speed ratio decreases. torque rises above a target value or target range of values, then 0029. At step 260, an accelerator position may be deter the chassis controller 72 may transmit Suitable signals) to mined. For example, the engine controller 52 may receive release one or more of the brakes 70. As used herein, the term signals from the accelerator sensor 32 and process those “release' brakes includes decreasing braking pressure or signals to determine the accelerator position. Those skilled in removing braking pressure. The method 200 may loop con the art will recognize that accelerator position may be deter tinuously from step 210 through step 290, and, for example, mined in any suitable manner. may end when indications of vehicle descent are no longer 0030. At step 265, a target engine braking torque may be received at step 215, such as when the vehicle 10 is no longer varied as a function of accelerator position. For example, the traversing downwardly sloped terrain as indicated by the chassis controller 72 may receive the detected accelerator vehicle descent sensor 76. Or the method 200 may end when US 2009/00 12690 A1 Jan. 8, 2009
the descent modesignal is no longer received at step 210. Such 12. The method of claim 1, wherein the indication of as when the driver turns off the descent mode switch and vehicle descent is received from a longitudinal accelerometer sensor 38. on the vehicle. 0037. While certain preferred embodiments have been 13. The method of claim 1, wherein the engine braking shown and described, persons of ordinary skill in this art will torque is monitored as a signal received from an engine con readily recognize that the preceding description has been set troller. 14. The method of claim 13, wherein the engine braking forth in terms of description rather than limitation, and that torque is monitored by, and compared to the target engine various modifications and Substitutions can be made without braking torque using, a chassis system controller. departing from the spirit and scope of the invention. The 15. A vehicle, comprising: invention is defined by the following claims. a plurality of wheels; What is claimed is: a plurality of brakes for slowing rotation of the wheels; 1. A method of controlling descent of a vehicle, the method a driveline coupled to at least one of the wheels; comprising the steps of a transmission coupled to the driveline; monitoring engine braking torque; an engine coupled to the transmission; and comparing the engine braking torque to a target engine at least one controller to control engine and brake opera braking torque; tion, wherein the controller is configured to: applying at least one brake when the engine braking torque compare actual engine braking torque to a target engine is less than the target engine braking torque; and braking torque; releasing at least one applied brake when the engine brak apply at least one of the brakes when actual engine ing torque is greater than the target engine braking braking torque is less than the target engine braking torque. torque; and 2. The method of claim 1, further comprising: release at least one applied brake when actual engine receiving an indication that the vehicle is in descent. braking torque is greater than the target engine brak 3. The method of claim 1, further comprising: ing torque. detecting a transmission speed ratio; and 16. The vehicle of claim 15, wherein fee controller is varying the target engine braking torque as a function of the further configured to receive an indication that the vehicle is detected transmission speed ratio. in descent. 4. The method of claim 3, wherein the target engine brak 17. The vehicle of claim 15, wherein the controller is ing torque is increased as the detected transmission speed further configured to: ratio increases and decreased as the detected transmission detect a ratio of the transmission; and speed ratio decreases. vary the target engine braking torque as a function of the 5. The method of claim 1, further comprising: detected transmission speed ratio. detecting an accelerator position; and 18. The vehicle of claim 15, wherein the vehicle further varying the target engine braking torque as a function of the comprises an accelerator and wherein the controller is further detected accelerator position. configured to: 6. The method of claim 5, wherein the target engine brak detect a position of the accelerator, and ing torque is decreased as the accelerator position is advanced vary the target engine braking torque as a function of the and increased as accelerator position is retracted. detected accelerator position. 7. The method of claim 1, further comprising: 19. A method of controlling descent of a vehicle automati sensing wheel speed; and cally without a driver having to apply brakes of the vehicle, varying the target engine braking torque as a function of the the method comprising the steps of sensed wheel speed. comparing an engine braking torque to a target engine 8. The method of claim 7, further comprising: braking torque; and monitoring the sensed wheel speed for at least one of wheel controlling one or more of the brakes of the vehicle so as to lock up or slippage; and maintain the engine braking torque Substantially at the controlling the brakes to avoid wheel lock up or slippage. target engine braking torque; 9. The method of claim 7, wherein the target engine brak wherein the target engine braking torque is varied as a ing torque is increased as the sensed wheel speed increases function of at least one of accelerator position or brake and is decreased as the sensed wheel speed decreases. application pressure. 10. The method of claim 1, further comprising: 20. The method of claim 19, wherein the target engine sensing brake application pressure; and braking torque is decreased as the accelerator position varying the target engine braking torque as a function of the advances and increased as the accelerator position retracts, sensed brake application pressure. and wherein the target engine braking torque is decreased as 11. The method of claim 10, wherein the target engine the brake application pressure increases and increased as the braking torque is decreased as the sensed brake application brake application pressure decreases. pressure increases and is increased as the sensed brake appli cation pressure decreases. c c c c c